1
Изобретение относится к области автоматики и вычислительной техники и, в частности, к системам программного управления станками с записью информации на магнитную ленту.
Известны системы двухкоординатного программного управления с коррекцией программы, содержащие блок считывания технологической информации, блок считывания опорного сигнала и по каждой координате последовательно соединенные блок считывания управляющей информации, детектор отклонения, блок управления приводом, привод, датчик обратной связи, подключенный к блоку считывания опорного датчика, и блок ввода коррекции, подключенный к детектору отклонения.
Цель изобретения - снижение трудоемкости подготовки программы.
Это достигается тем, что в систему введены регулятор величины коррекции, последовательно соединенные задатчик эталонного сигнала, блок сравнения, блок обратной связи, двухканальный блок масштабирования и блок геометрического сложения, подключенный к блоку сравнения, и по каждой координате блоки переключения знаков коррекции, подключенные к блоку считывания технологической информации, причем блоки управления приводами по каждой координате
через последовательно соединенные двухканальный блок масштабирования, блоки переключения знаков коррекции и регулятор величины коррекции подключены к блокам ввода коррекции другой координаты.
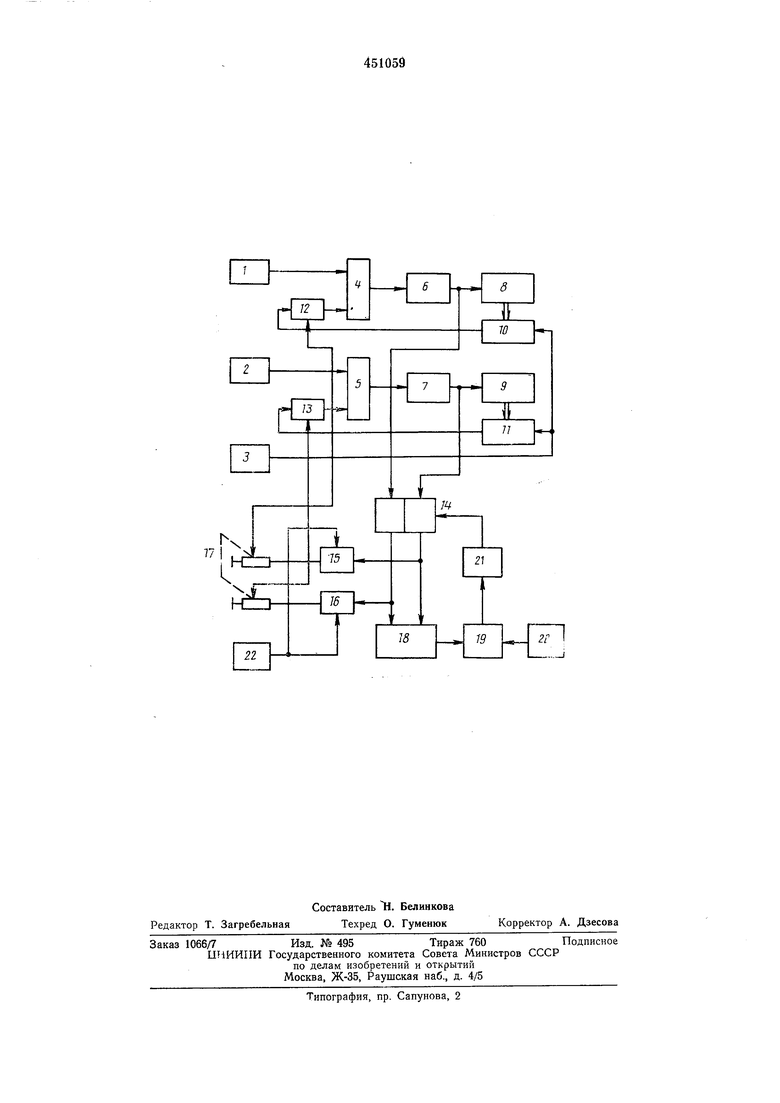
На чертеже представлена блок-схема системы.
Система содержит блоки 1, 2, 3 считывания сигналов с магнитной ленты соответственно
для координат х, у управляющей информации и опорного сигнала, детекторы 4, 5 отклонения, блоки 6, 7 управления приводом, приводы 8, 9, датчики 10, 11 обратной связи, блоки 12, 13 ввода коррекции, двухканальный
блок 14 масштабирования, блоки 15, 16 переключения знаков коррекции, регулятор 17 величины коррекции, блок 18 геометрического сложения, блок 19 сравнения, задатчик 20 эталонного сигнала, блок 21 обратной связи и
блок 22 считывания технологической информации.
Сигнал с магнитной ленты поступает на блоки считывания 1, 2 и 3, выходные сигналы которых поступают соответственно на детекторы 4 и 5 отклонения, а опорный сигнал через датчики обратной связи 10 и II и блоки 12 и 13 ввода коррекции - на вторые входы детекторов 4 и 5 отклонения. При совпадении управляющих и опорных сигналов, т. е. при
отсутствии перемещений по программе, сигнал с выходов детекторов отклонения равен нулю. С выходов блоков 6 и 7 управления в этом случае также нет сигналов, и приводы не перемещаются.
При появлении сдвига фазы в какой-либо из координат по отношению к опорному сигналу на выходе детектора отклонения соответствующей координаты появляется сигнал, пропорциональный этому сдвигу фаз, и блок управления соответствующей координаты начинает перемещать привод, связанный с датчиком, в таком направлении, чтобы управляющий и опорный сигналы на входах детектора отклонения были равны.
При наличии перемещений по координатам сигналы с блоков 6 и 7 управления поступают также и на входы двухканального блока 14 масщтабирования, с выходов которого они поступают на входы блока 18 геометрического сложения, направляющего сигнал на блок 19 сравнения, где производятся его сравнения с сигналом эталонного задатчика 20. Сигнал отклонения с выхода блока 19 сравнения через блок 21 обратной связи устанавливает выходную величину двухканального блока 14 масштабирования, равную эталонному сигналу. Величина эталонного сигнала выбирается такой, чтобы обеспечить максимальную величину коррекции.
С выходов двухканального блока 14 масщтабирования сигналы поступают через блоки 15 и 16 переключения знака коррекции, ручной регулятор 17 величины коррекции на блоки 12 и 13 ввода коррекции, причем сигнал с одной координаты поступает на блок ввода коррекции другой координаты.
Предмет изобретения
Система двухкоординатного программного управления с коррекцией программы, содержащая блок считывания технологической информации, блок считывания опорного сигнала и по каждой координате последовательно соединенные блок считывания управляющей информации, детектор отклонения, блок управления приводом, привод, датчик обратной
связи, подключенный к блоку считывания опорного сигнала, и блок ввода коррекции, подключенный к детектору отклонения, отличающаяся тем, что, с целью снижения трудоемкости подготовки программы, в систему введены регулятор величины коррекции, последовательно соединенные задатчик эталонного сигнала, блок сравнения, блок обратной связи, двухканальный блок масщтабирования и блок геометрического сложения, подключенный к блоку сравнения, и по каждой координате блоки переключения знаков коррекции, подключенные к блоку считывания технологической информации, причем блоки управления приводами по каждой координате
через последовательно соединенные двухканальный блок масштабирования, блоки переключения знаков коррекции и регулятор величины коррекции подключены к блокам ввода коррекции другой координаты.
red
| название | год | авторы | номер документа |
|---|---|---|---|
| Система двухкоординатного программногоупРАВлЕНия C КОРРЕКциЕй пРОгРАММы | 1979 |
|
SU798716A2 |
| Цифровая система управления | 1986 |
|
SU1439531A1 |
| Способ управления двухстадийным циклом мокрого измельчения | 1984 |
|
SU1232283A1 |
| СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2008 |
|
RU2388010C1 |
| Устройство для автоматического управления роторным экскаватором | 1980 |
|
SU899763A1 |
| Программный регулятор температуры перегретого пара судового котла с принудительной циркуляцией | 1975 |
|
SU641223A1 |
| Устройство для многоканальной магнитной записи и воспроизведения сигналов с коррекцией временных искажений | 1990 |
|
SU1783577A2 |
| Устройство для автоматического управления роторным экскаватором | 1980 |
|
SU876867A1 |
| Частотно-управляемый электропривод | 1989 |
|
SU1720138A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО ПРОИЗВОДСТВА СБОРОЧНЫХ ЧЕРТЕЖЕЙ | 1970 |
|
SU268756A1 |