1
Изобретение относится к автоматике и вычислительной технике, в частности к системам программного управления с записью программы на магнитную ленту.
По основному авт.св. № 451059, известна система двухкоордина тного программного управления с коррекцией програмиы содержащая блок считывания технологической информсщии, блок считывания опорного сигнала и по каждой координате последовательно соединенные блок считывания управля ющей информации, детектор отклонения, блок управления приводом, привод, датчик обратной связи, подк|ио.ченный к блоку считывания опорног сигнала, блок ввода коррекции, подклченный к детектору отклонения, регулятор величины коррекции, последовательно соединенные згщатчик эталонного сигнала, блок сравнения, блок обратной связи, двухканальный блок масштабирования, блок геометрического сложения, подключенный к блоку сравнения, и по каждой координате блоки переключения знаков коррекции, подключенные к блоку считывания технологической информации, причем блоки управления приводгини по кеивдой
координате через последовательно соединенные двухканальный блок масштабирования, блоки переключения знаков коррекции и регулятор величины коррекции подключены к блокам ввода коррекции другой координаты l.
Недостаток системы - низкая динамическая точность коррекции программы, обусловленная значительным вре0менным сдвигом между сигналами управляющей информации, поступающими с выходов блоков считывания управляющей информации на входы детекторов отклонения, и сигналами корректирующей ин5формации, поступающими с выходов регулятора величины коррекции через блок ввода в цепях коррекции за период времени формирования корректирующих сигналов.
0
Цель изобретения - повышение точности cHCTeNttj.
Поставленная цель достигается тем что в систему введены формирователь команд, регулятор скорости и блоки
5 записи.и считывания сигналов коррекции, а блоки переключения знаков коррекции подключены к регулятору величины коррекции через коммутатор, соединенный с блоками записи и считы0вания сигналов коррекции и с Фоомирователем команд, подключенным к регулятору скорости.
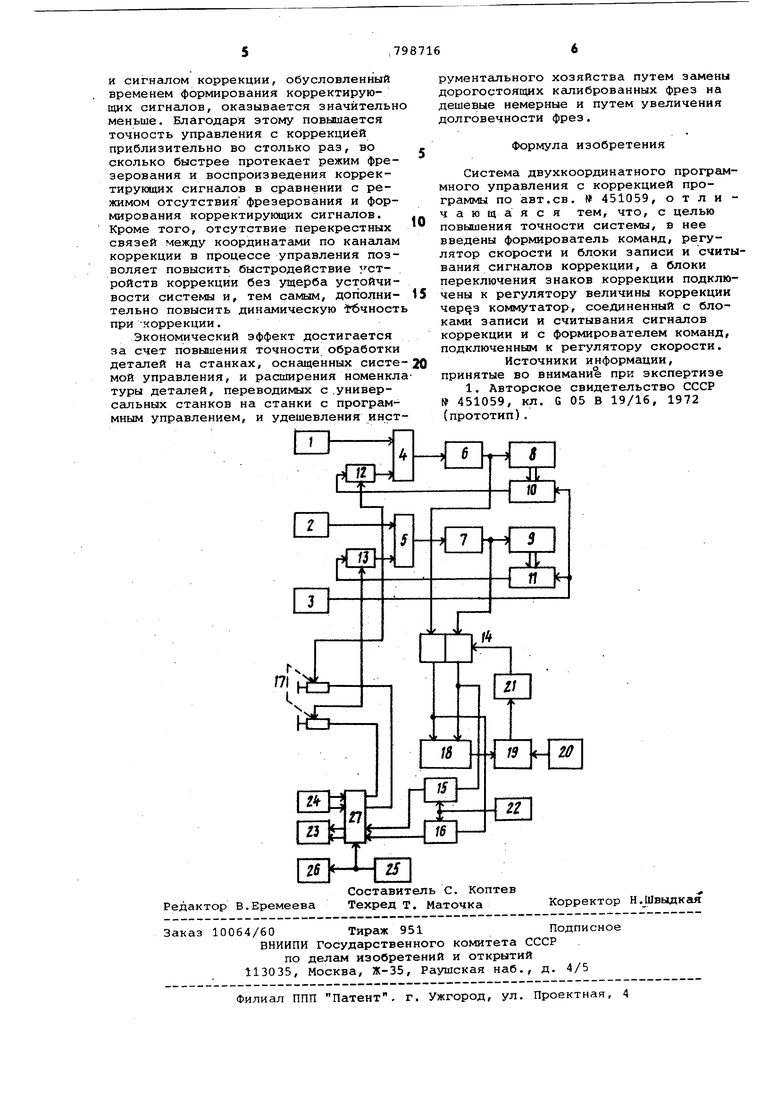
На чертеже представлена .блоксхема систеМЬ.
Система содержит блоки 1 и 2 считывания управляющей информации и бло 3 опорного сигнала, детекторы 4 и 5 отклонения, блоки 6 и 7 управления приводом, приводы 8 и 9, датчики 10 (и 11 обратной связи, блоки 12 и 13 ввода коррекции, двухканальныйблок 14 масштабирования, блоки 15 и 16 переключения знаков коррекции, регулятор 17 величины коррекции, блок 18 геометрического сложения, блок 19 сравнения, задатчик 20 эталонного .сигнала, блок 21 обратной связи,блок 22 считывания технологической информации, блок 23 записи сигналов корреции, блок 24 считывания сигналов коррекции, формирователь 25 команд, регулятор 26 скорости и коммутатор 27
Система работает в двух режимах в режиме отсутствия фрезерования, формирования и записи корректирующих сигналов и-в режиме фрезерования- и воспроизведения корректирукицих сигналов.
Переключение режимов работы системы выполняется формирователем 25 по команде, поступающей на регулятор 26 и на коммутатор 27.
В режиме отсутствия фрезерования и формирования корректирующих сигнало система работает- следующим образом.
Команда с выхода формирователя 25 включает регулятор 26 на малую скорость, через коммутатор 27 подключает выходы блоков 15 и 16 ко входам блока 23 и отключает выходы блока 24 от регулятора 17.
Сигнал с магнитной ленты поступае на блоки 1-3, выходные сигналы которых поступают, соответственно, на. детекторы 4 и 5, а опорный сигнал через датчики 10 и 11 и блоки 12 и 13 - на вторые входы детекторов 4 и 5. При совпадении управляющих и опорных сигналов, т.е. при отсутствии перемещений по программе, сигнгш с выходов детекторов 4 и 5 равен нулю. С выходов блоков 6 и 7 в этом случае также нет сигналов, и приводы не перемещаются.
При появлении сдвига фаз в какойлибо из координат по отнсяпению к опо ному сигналу на выходе детектора отклонения соответствующей координаты появляется сигнгш, пропорциональный этому сдвигу фаз, и блок управления приводом соответствующей координаты начинает перемещать привод, связанный с датчиком, в таком направлении, чтобы управляквдий и опорный сигналы на входах детектора отклонения были равны.
При наличии перемещений по координатс1м сигналы с блоков 6 и 7 посту пают также на входы блока 14, с выходов которого они поступают на входы блока 18, направляющего сигнал на блок 19, где производится его сравнение с сигналом эадатчика 20. Сигнал отклонения с выхода блока 19 через блок 21 устанавливает выходную величину блока 14, равную эталонному сигналу. Величина эталонного сигнала выбирается такой, чтобы обеспечить максимальную величину коррекции .
С выходов блока 14 сигналы поступают через блоки 15 и 16 и коммутато J7 на блок 23.
В режиме фрезерования и воспроизведения корректирующих сигналов сиетема работает следующим образом.
Команда с формирователя 25 переключает регулятор 26 на большую скорость, через коммутатор 27 отключает выходы блоков 15 и 16 от входов блок 23 и подключает выходы блока 24 к регулятору 17.
Сигнал с магнитной ленты поступае на блоки 1,2,3 и 24, выходные сигнал которых поступают, соответственно, н детекторы 4 и 5. Причем сигнал с выхда блока 24 поступает на детекторы .4 и Ьчерез регулятор 17,где он умно-жается на определенную величину и прнимает значение корректирующего сигНс1ла, и блоки 12 и 13, где он преобразуется в пропорциональный сдвиг фа по отношению к опорному сигна.лу, а сигнал с блока 3 поступает на детекторы 4 и 5 через датчики 10 и 11, гд они приобретают сдвиг фаз по отношению к опорному сигналу, пропорциональный положению привода, и через блоки 12 и 13, где суммируются эти сдвиги фаз.
При появлении сдвига фаз в какойлибо из координат по отношению к опо ному сигналу на выходе детектора отклонения соответствующей координаты появляется сигнал, пропорциональный этому сдвигу фаз, и блок управления приводом соответствующей координаты начинает перемещать привод, связанный с датчиком, в таком направлении, чтобы сигналы на входах детектора отклонений были равны. В результате, привод перемещается на величину запрограммированного перемещения, если сдвиг фаз относительно опорного сигнала появляется в управляющем сигнале, и на величину коррекции, если сдвиг фаз относительно опорного сигнаша появил ся в результате изменения величины коррекции по данной координате.
Так как режим фрезерования и воспроизведения корректирующих сигна-лов. протекает быстрее, чем режим отсутс±вия фрезерования и формирования корректирукжцих сигналов из-за разной скорости движения магнитной ленты, то при фрезеровании временной сдвиг между управляющим сигналом и сигналом коррекции, обусловленный временем формирования корректирующих сигналов, оказывается значительн меньше. Благодаря этому повышается точность управления с коррекцией приблизительно во столько раз, во сколько быстрее протекает режим фрезерования и воспроизведения корректирующих сигналов в сравнении с режимом отсутствия фрезерования и формирования корректирующих сигналов. Кроме того, отсутствие перекрестных связей между координатами по каналам коррекции в процессе управления позволяет повысить быстродействие устройств коррекции без ущерба устойчивости системы и, тем самым, дополнительно повысить динамическую бчност при коррекции. Экономический эффект достигается за счет повышения точности обработки деталей на станках, оснащенных систе мой управления, и расширения номенкл туры детсшей, переводимых с .универСсшьных станков на станки с программным управлением, и удешевления инст рументального хозяйства путем замены дорогостоящих калиброванных фрез на дешевые немерные и путем увеличения долговечности фрез. Формула изобретения Система двухкоординатного программного управления с коррекцией программы по авт.св. № 451059, отличающаяся тем, что, с целью повышения точности системы, в нее введены формирователь команд, регулятор скорости и блоки записи и считывания сигналов коррекции, а блоки переключения знаков коррекции подключены к регулятору величины коррекции коммутатор, соединенный с блоками записи и считывания сигналов коррекции и с формирователем команд, подключенным к регулятору скорости. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР 451059, кл. G 05 В 19/16, 1972 (прототип),
| название | год | авторы | номер документа |
|---|---|---|---|
| Система двухкоординатного программного управления с коррекцией программы | 1972 |
|
SU451059A1 |
| Устройство автоматической подстройки линейного закона частотной модуляции | 1984 |
|
SU1218463A1 |
| Вычислительное устройство для управления лучом фазированной антенной решетки | 1991 |
|
SU1829041A1 |
| Способ двухцикловой балансировки роторов и устройство для его осуществления | 1987 |
|
SU1446506A1 |
| Фазо-импульсное устройство для программного управления | 1975 |
|
SU538341A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО НАВЕДЕНИЯ РАДИОТЕЛЕСКОПА | 2006 |
|
RU2319171C1 |
| Устройство для измерения перемещений в системах программного управления | 1978 |
|
SU736050A1 |
| Программное регулирующее устройство | 1979 |
|
SU847277A1 |
| Устройство для программного управления | 1985 |
|
SU1280571A1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ ПАРАМЕТРОВ ТЕЛЕВИЗИОННЫХ ОПТИЧЕСКИХ СИСТЕМ | 1991 |
|
RU2010448C1 |
