(54) УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ РОТОРНЫМ ЭКСКАВАТОРОМ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического управления роторным экскаватором | 1987 |
|
SU1434039A1 |
| Устройство для автоматического управления роторным экскаватором | 1980 |
|
SU899763A1 |
| Устройство для автоматического управления роторным экскаватором | 1981 |
|
SU988987A1 |
| Устройство автоматического управления роторным экскаватором | 1982 |
|
SU1097757A1 |
| Устройство диагностики состояния рабочего органа роторного экскаватора | 1987 |
|
SU1479574A1 |
| Устройство для автоматического управления роторным экскаватором | 1984 |
|
SU1221280A2 |
| Способ автоматизированного управления рабочим процессом роторного экскаватора и система управления для его осуществления | 1985 |
|
SU1686078A1 |
| Автоматизированная система управления рабочим процессом роторного экскаватора | 1985 |
|
SU1703797A1 |
| Система автоматизированного управления роторным экскаватором | 1983 |
|
SU1164374A1 |
| Способ формирования управляющего воздействия на привод поворота роторной стрелы роторного экскаватора и устройство для его осуществления | 1984 |
|
SU1469030A1 |
I
Изобретение относится к автоматизации горного оборудования, а именно к устройству для. управления роторным экскаватором.
Известно устройство для автоматического управления роторным экскаватором путем изменения скорости привода поворота роторной стрелы при стабилизации его производительности 1.
Однако известное устройство не обеспечивает требуемой точности при управлении, так как в сигнал управления этого устройства вносится временное запаздывание.
Известно устройство автоматического управления роторным экскаватором, в котором регулирование производительности ведется по рассогласованию величин задания нафузки и фактической нагрузки привода ротора, причем последняя величина коррелирована со стабилизируемым параметром (производительностью) и может быть измерена без запаздывания. Устройство включает задатчик и датчик производительности экскаватора, датчик нагрузки привода ротора, .узел сглаживания сигнала нагрузки, к первому входу которого подключен датчик нагрузки, а выход соединен с одним из входов элемента сравнения, выход которого соединен с регулятором скорости привода поворота роторной стрелы, ко второму входу узла сравнения подключен узел коррекции. содержащий блоки деления и умножения, первый вход узла коррекции связан с задатчиком, а второй - с датчиком производительности. Устройство также содержит элемент нерегулируемой задержки в виде программного реле, запоминающие механизмы, релейный усилитель, реле, управления с соответствующими связямир
10
Недостатком этого устройства является . неточность управления, обусловленная следующими факторами, вытекающими из структуры устройства. Во-первых, в сигнале датчика нагрузки привода ротора и в сиг 5 нал1е датчика производительности экскаватора имеется ощибка периодического характера, вызванная дебалансом ротора и неравномерностью работы ковшей. Имеющаяся ошибка в устройстве не может быть полностью скомпенсирована с помощью фильтра с неизменяемыми параметрами (в кон30туре обратной связи по ) и путем усреднения производительности на неизменном временном интервале, некратном в общем случае, периоду оборота ротора (в контуре корректирующей обратной связи). Это обусловлено тем, что период указанной ошибкн изменяется в процессе экскавации в соответствии с изменением скорости ротора. Однако в устройстве это не учитывается. Во-вторых, сигнал коррекции вводится дискретно с интервалом, равным принятому времени транспортного запаздывания. При существенном изменении производительности за это время сигнал задания изменится скачком, что приведет к возрастанию динамической ошибки. В-третьих, в устройстве сигнал коррекции задания производительности формируется только на основании оценки средней производительности на некотором интервале времени, предществующем моменту ввода коррекции, без учета изменения значения нагрузки на этом временном интервале. Последнее приводит. к погрешности коррекции, так как регулирование скорости привода поворота ведется по отклонению нагрузки привода ротора от заданного значения, а среднее значение производительности не отражает связь нагрузки и производительности на указанном интервале времени.
Цель изобретения - повышение точности управления.
Указанная цель достигается тем, что в устройство дополнительно введены датчик скорости привода ротора и датчик скорости KOHBeffepa, выходы которых подключены соответственно к четвертому и пятому входам узлам коррекции, третий вход которого соединен с датчиком нагрузки привода ротора, причем выход датчика скорости привода ротора соединен также со вторым входом узла сглаживания .нагрузки.
При этом узел сглаживания сигнала нафузки выполнен в виде блоков скользящего интегрирования нагрузки и масштабирования, первый вход которого связан с выходом блока скользящего интегрирования нагру.эки, а выход блока масштабирования является выходом узла сглаживания сигнала нагрузки.
Узел коррекции дополнительно снабжен блоком регулируемой задержки и блоками скользящего интегрирования нагрузки и производительности, выходы последних подключены к блоку деления, к первому входу блока скользящего интегрирования нагрузки подключен выход блока регулируемой задержки, вторые входы блоков скользящего интегрирования нагрузки и производительности являются четвертым входом узла коррекции, причем первый вход блока скользящего интегрирования производительности является вторым входом узла коррекции, а вход блока регулируемой задержки является пятым входом узла коррекции; блоки скользящего интегрирования нагрузки и производительности выполнены в виде последовательно соединенных сдвигового регистра, реверсивного счетчика и цифро-аналогового преобразователя.
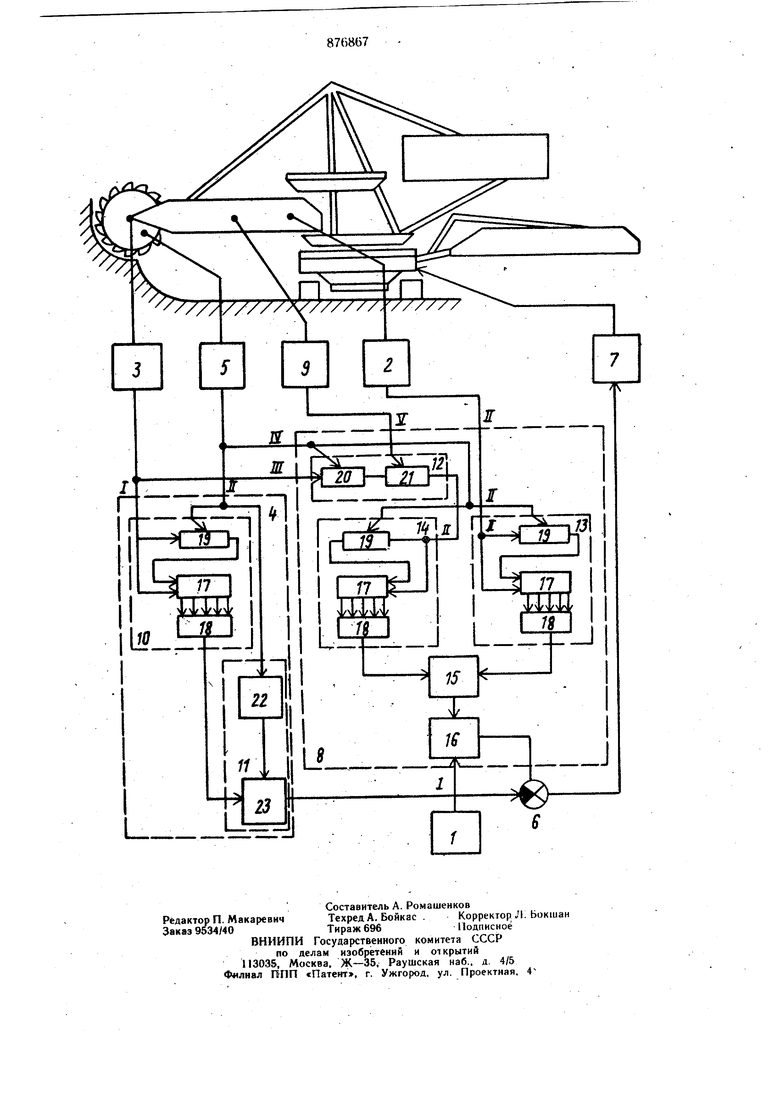
На чедтеже представлена схема предлагаемого устройства.
Устройство содержит задатчик I и датчй 2производительности экскаватора, устанЬвленный на конвейере роторной стрелы, датчик 3 нагрузки привода ротора, соединеннв1,й с первым входом узла 4 сглаживания сигнал нагрузки, второй вход которого соединен с датчиком 5 скорости привода ротора, а выход связан с первым входом элемента 6 сравнения, регулятор 7 скорости привода поворота роторной стрелы, вход которого связан с выходо элемента 6 сравнения, и узел 8 коррекции, первый вход которого
связан с задатчиком I. Второй вход соединен с датчиком 2 производительности, третий вход - с датчиком 3 нагрузки привода ротора, четвертый вход связан с датчиком 5 скорости привода ротора, пятый вход - с датчиком 9 скорости конвейера, а выход -
со вторым входом элемента 6 сравнения, узел 4 сглаживания сигнала нагрузки содержит блок ..10 скользящего интегрирования нагрузки, первый вход которого является первым входом узла 4 сглаживания, а
5 второй вход - вторым входом этого узла, и блок 11 масштабирования, первый вход которого связан с выходом блока 10, а второй вход - со вторым входом блока 10. Узел 8 коррекции .включает блок 12 регулируемой задержки, вход которого является .
0 третьим входом узла коррекции, блок 13 скользящего интегрирования производительности, первый вход которого является вторым входом узла 8 коррекции, а второй вход соединен с четвертым входом блока 8 и вторым входом блока 14 скользящего интегрирования нагрузки, первый вход которого соединен с выходом блока 12 регулируемой задержки, второй блок 15 деления, вход делимого которого связан с выходом блока 14 скользящего интегрирования иац грузки, а вход делителя - с выходом блока 13 скользящего интегрирования производительности, и блок 16 умножения, первый вход которого соединен с выходом блока 15 деления, второй вход является первым входом узла 8 коррекции, а выход яв5 ляется выходом этого узла.
Блоки 10, 13 и 14 скользящего интегрирования входной величины (в данном случае нагрузки или производительности) содержат соединенные между собой ревер® сивный счетчик 17, цифро-аналоговый преобразователь 18 и сдвиговый регистр 19. Блок II масштабирования может, например, включать блок 22 формирования интервала усреднения (последний, в свою очередь,
J может быть выполнен в виде счетчика, поразрядные выходы которого соединены с соответствующими входами цифро-аналогового преобразователя), вход которого является вторым входом блока масштабирова
ния, и блок 23 деления, вход долимого которого является иервим входом блока маеплабнровакия, вход делителя связан с выходом блока 22, а выход являете выходом блока масштабирования.
Блок 12 регулируемой задержки может быть вынолнен, например, в виде двухсекционного сдвигового регистра, первый вход ,первой секции 20 KOTopoio является третьим входом узла и сглаживания нагрузки, а второй вход этой секции является четвертым входом узла, первый вход второй секции 21 соединен с выходом нервой секции 20, второй вход секции 21 является вторым входом блока 12, а В1)1ход - выходом этого блока.
Устройство работает следующим образом.
От датчика 3 нагрузки цривода ротора сигнал, частота импульсов которого пропорциональна нагрузке привода ротора, поступает через первый вход узла 4 сглаживания на суммирующий вход реверсивного счетчика 17 и на первый вход сдвигового регистра 19 блока 10 скользящего интегрирования нагрузки. Одновременно через второй вход узла 4 на второй вход сдвигового регистра 19 подается частотно-модулированный импульсный сигнал от датчика 5 скорости ротора, в результате чего информация в этом регистре сдвигается со скоростью, пропорциональной действительной скорости ротора. Таким образом, сигнал на выходе регистра 19 содержит информацию, поступающую-на первый вход блока Ш скользящего интегрирования, но задержанную на время, равное действительному периоду обо рота ротора. Этот сигнал поступает на вычитающий вход реверсивного счетчика 17. В счетчике 17 производится вычисление разности входных величин этого счетчика и непрерывное определение интеграла во времени от этой разности, т.е. определение интеграла от разности входной функции времени (в данном случае нагрузки привода poTQpa) . и этой же функции времени, запаздывающей по отношению к текущему моменту на время, равное действительному периоду оборота ротора. На выходе счетчика 17 образуется, таким образом, непрерывно изменяющийся во времени кодовый сигнал, соответствующий, интегралу нагрузки на скользящем временном интервале, равном периоду оборота ротора.хЭтот сигнал преобразуется в аналоговую величину в цифроаналоговом преобразователе 18 и по связи выхода блока 10 скользящего интегрирования с первым входом блока 11 масщтабирования, поступает на вход делимого блока 23 деления. В то же время через второй вход узел сглажинания сигнала нагрузки на вход блЬка 22 формирования интервала усреднения, входящего в состав блока 11 масштабиргжаиия, поступает частотно-модулированный сигнал от датчика скорости
принода , и в блоке 22 производится определение текущей величины периода оборота ротора. С выхода блока 22 сигнал, соответствующий этой величине, подается на
тод делителя блока 23 деления, в котором формируется сигнал, пропорциональный среднему интегральному значению нагрузки на скользящем временн(м интервале, равном фактическому периоду оборота ротора. В(1ходной сигнал блока 23 через выход блока
П масштабирования и узла 4 сглаживания сигнала нагрузки подается на один из входов элемента 6 сравнения. Одновременно с этим на второй вход элемента 6 сравнения поступает сигнал, соответствующий откорректированной величине задания производительности, который формируется следующим образом. Через второй вход узла S коррекции на первый вход блока 13 скользящего интегрировгишя производительности поступает частотно-модулированный импульсный
JJ сигнал от датчика 2 производительности экскаватора, а через четвертый вход узла 8 коррекции на второй вход блока 13 подается частотно-модулированный сигнал от датчика 5 скорости привада ротора. В блоке 13 производится интегрирование величины про5 изводительностн на скользящем во времени интервале, равном периоду оборота ротора (работа блока 13 скользяп1его интегрирования производительности аналогична описанной выше работе блока 10 скользящего интегрирования нагрузки), н выходной сигнал
0 блока 13 подается на вход делителя блока 15 деления. В то же время через третий вход узла 8 коррекции частотно-модулированный сигнал от датчика 3 нагрузки привода ротора поступает на вход блока 12 регулируемой задержки. В первой секции 20 сдвигового регистра блока 12 этот сигнал сдвига ется со скоростью, пропорциональной скорости вращения ротора, а во второй секции 21 - со скоростью, пропорциональной скорости конвейера роторной стрелы, так как
0 на вторые (сдвиговые) входы этих секций подаются частотно-модулированные сигналы сигналы от датчика 5 скорости привода ротора и датчика 9 скорости конвейера соответственно. На выходе блока 12 регулируемой задержки формируется, таким образом,
S импульсный сигнал, пропорциональный нагрузке, который сдвинут относительно момента измерения нагрузки на время; равное действительному времени транспортного за паздывания в канале измерения производительности, состоящему из времени подъема
горной массы в ковщах ротора и времени перемещения её по конвейеру роторной стрелы до места установки датчика 2 производительности. Этот сигнал поступает на первый вход блока 14 скользящего интегрировадая нагрузки, на второй вход которого подается сигнал от датчика 5 скорости привода ротора, а на выходе этого блока формируется сигнал, соответствующий интегралу величины нагрузки привода ротора на сколь 87зящём интервале времени, равном периоду оборота ротора (работа блока 14 аналогична работе блоков 10 и 13) и сдвинутом относительно момента намерения нагрузки на время перемещения горной массы от забоя до места установкн датчика 2 производительности. Выходной сигнал блока 14 скользящего интегрирования нагрузки подается на вход делимого блока 15 деления. В блоке; 15 производится деление интегральных величин нагрузки и производительности, приведенных к моменту измерения производительности, и сигнал, пропорциональный полученному частному, с выхода этого блока подается на один из входов блока 16 умножения. От задатчика 1 производительности сигнал задания производительности поступает через первый вход узла 8 коррекции на второй вход блока 16 умножения, в котором он умножается на выходной сигнал блока 15 деления. Таким образом, сигнал на выходе блока 16, а следовательно, на выходе узла 8 коррекции, соответствует величине задания производительности, умноженной на отношение интегральных значений нагрузки и производительности, определенных за период оборота ротора и приведенных к одному моменту времени. Этот сигнал поступает на второй вход элемента 6 сравненения, где сравнивается с сигналом, соответствующим действительному значению средней за период оборота ротора нагрузки, а сигнал, соответствующих нх рассогласованию с выхода элемента 6 сравнения подается на регулятор 7 скорости привода Поворота роторной стрелы, который изменяет скорость поворота в направлении уменьшения указанного рассогласования. При этом происходит и уменьшение рассогласования между фактической, и заданной производительностью, т.е. осу1цествляется стабилизация производительности на заданном уровне. Таким образом, на входы элемента сравнения устройства для автоматического управления поступают сигналы, содержащие более точную информацию, чем аналогичные сигналы в известном устройстве, что приводит к повышению точности управляющего сигнала, подаваемого на вход регулятора скорости привода поворота роторной стреЛЫ, а в конечном счете - к повышению точности управления, а следовательно, увеличению производительности экскаватора. Формула изобретения I. Устройство для автоматического управ.ления роторным экскаватором, включающее задатчик и датчик производительности экскаватора, датчик нагрузки привода ротора, узел сглаживания сигнала нагрузки, к первому входу которого подключен датчик нагрузки, а выход соединен с одним из входов элемента сравнения, выход которого соединен с регулятором скорости привода поворота роторной стрелы, ко второму входу элемента сравнения подключен узел коррекции, содержащий блоки деления и умножения, первый вход узла коррекции связан с задатчиком, а второй - с датчиком производительности, отличающееся тем, что, с целью повышения точности управления, оно снабжено датчикамч скорости привода ротора и конвейера, выходы которых подключены соответственно к четвертому и пятому входам узла коррекции, третий вход которого соединен с датчиком нагрузки привода ротора, причем выход датчика скорости привода ротора соединен также со вторым входом узла сглаживания сигнала нагрузки. ,2. Устройство по п. 1, отличающееся тем, что узел сглаживания нагрузки выполнен в виде блоков скользящего интегрирования нагрузки и масштабирования, первый вход которого связан с выходом блока скользящего интегрирования нагрузки, а выход блока масштабирования является выходом узла сглаживания сигнала нагрузки. 3.Устройство по п. 1, отличающееся тем, что узел коррекции дополнительно снабжен блоком регулируемой задержки и блоками скользящего интегрирования нагрузки и производительности, выходы последних годключены к блоку деления, к первому входу блока скользящего интегрирования нагрузки подсоединены выход блока регулируемой задержки, вторые входы блоков скользящего интегрирования нагрузки и производительности являютсй четвертым входом узла коррекций, приче.м первый вход блока скользящего интегрирования производительности является вторым входом узла коррекции, а вход блока регулируемой задержки является пятым входом узла коррекции. 4.Устройство по п., I, отличающееся тем, что блоки скользящего интегрирования нагрузки и производительности выполнены в виде последоват(льно соединенных сдвигового регистра, реверсивного счетчика и цифро-аналогового преобразователя. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 304333, кл. Е 02 F 3/26, 1969. 2.Авторское свидетельство СССР ,№ 302444, кл. Е 02 F 3/26, .1969 (прототуп).
