1
Изобретение относится к автоматике и вычислительной технике и иокет быть использовано при контроле углового положения вращающегося объекта, например, антенны радиолокационной станции для представления угла поворота в виде последовательности импульсов.
Известны преобразователи угловвг го положения в последовательность импульсов, содержащие датчик импульсов, выход которого соединен с одниы входом измерителя скорости, к другому входу которого подключен генератор импульсов, сумматор, блок
управления.
Нестабильность скорости вращения контролируемого объекта вызывает погрешность в работе устройства,
цель изобретения - повышение точности работы преобразователя. Для этого в него введен управляемый делитель частоты, причем выход I измерителя скорости через блок
управления соединен с входои управляемого делителя частоты, к другому входу которого подключен выход генератора импульсов, а выход управляемого делителя соединен с одним входом сумматора, к другому входу которого подключен выход датчика импульсов.
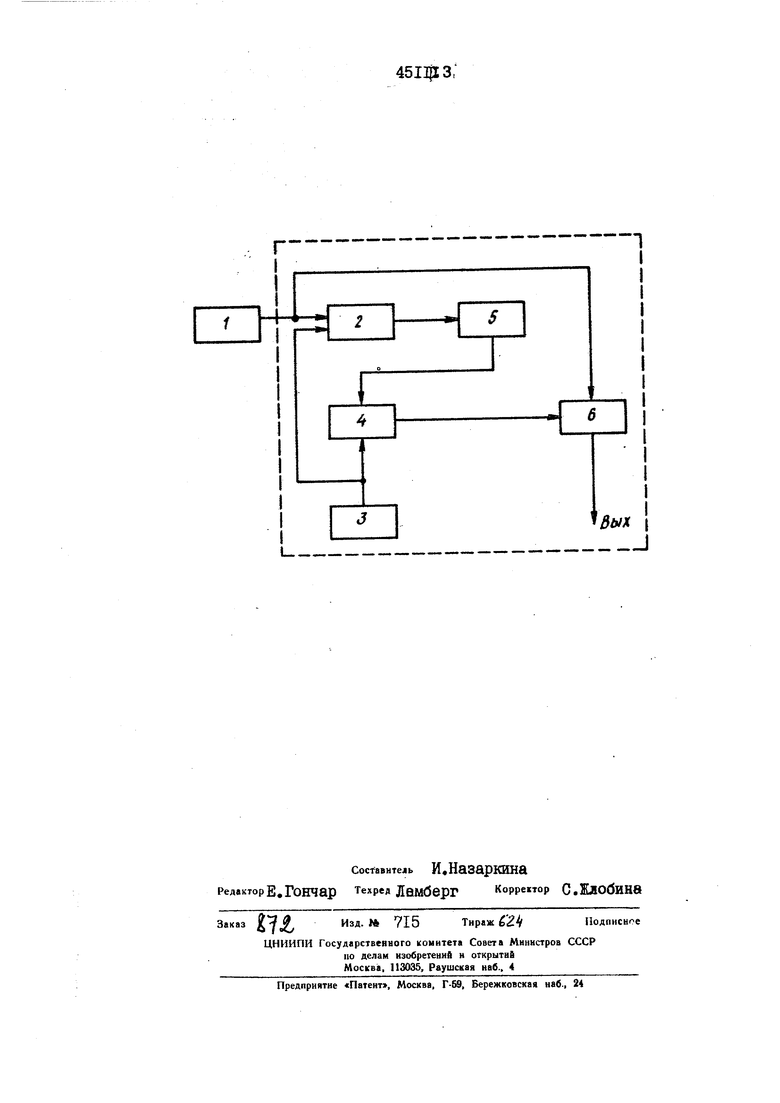
На чертеже представлена функциональная схема устройства.
Датчик импульсов i механически связан с валом контролируемого объекта (на чертеже не показан), Выход датчика импульсов I соединен с входом измерителя скорости 2, к другому входу которого подключен выход генератора импульсов 3, Выход генератора импульсов соединен также с входом управляемого делителя частоты 4, другой вход которого через блок управления 5 соединен с выходом измерителя скорости, а выход - с входом сумматора 6, к другому входу которого подключен
выход датчика шпульсов.
Преобразователь работает следующий образои.
Датчик импульсов при вращении вала контролируемого объекта выдает последовательные метки Симпульсы). исло выданных меток пропорционально углу поворота вала, Дри этом число меток в течение одного оборота ограничено. Данные метки поступают на измеритель скорости 2 и на сумматор 6.
Временная расстановка между мётками с датчика импульсов I зависит от скорости вращения вала. Мзиеритель скорости Н через блок управления 5 устанавливает в управляемом делителе частоты 4 соответствующее скорости вращения значение коэффициента деления частоты. Тогда за время между двумя метками с датчика импульсов Г на суииатор 6 проходит определенное число меток с управляемого делителя частоты, ременная расстановка между метками с управляемого делителя частоты 4 определяется частотой генератора импульсов 3 и значением коэффициента деления частоты.
1ри изменении скорости вращения вала измеритель скорости устанавливает новое значение коэффициента деления частоты,
При этом между двумя метками с датчика иыпульсов проходит прежнее число меток. Однако временное расстояние между метками другое и определяется скоростью вращения ва ла контролируемого объекта. Блок управления 5 обеспечивает постоянство коэф4жциента деления частоты в период между поступлением двух соседних иеток с датчика импульсов
.умматор суммирует последовательнисти импульсов, снимаемых с датчика импульсов Х и с управляемо4
о делителя частоты . акйм образом, на выходе преобразователя выается постоянное число угловых еток (импульсов), пропорциональых углу поворота. При этом погрешость выдачи угла в значительно еньшей степени зависит от нестабильности вращения вала контролируемого объекта. Стационарная нестабильность вращения мозйвт быть скомпенсирована полностью. Ч.то же касается переменной, то компенсация ее ограничивается крутизной характеристики нестабильности вращения вала. При значительной инерционности вала и большом числе меток с датчика импульсов разность временных интервалов между тремя соседними метками с датчика импульсов на порядок меньше временной расстановки импульсов, снимаемых, с управляемого делителя частоты .
ПРЕДМЕТ ИЗОБРИЕНШ
Преобразователь углового положения вала в последовательность
импульсов, содержащий датчик импульсов, выход которого соединен с одним входом измерителя скорости, к другому входу которого подключен генератор импульсов, сумматор, блок управления, отличающийся тем, что, с целью повышения точности работы преобразователя в него введен управляемый делитель частоты, причем выход измерителя скорости через блок управления соединен с входом управляемо. го делителя частоты, к другому входу которого подключен выход генератора импульсов, а выход управляемого делителя частоты соединен с
одник входом сумматора, к другому входу которого подключен выход датчика импульсов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровой измеритель крутящего момента | 1985 |
|
SU1283555A1 |
| Преобразователь углового положения вала в последовательность импульсов | 1978 |
|
SU781863A2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ДВИГАТЕЛЕЙ ВНУТРЕННЕГО СГОРАНИЯ И ЭКСПЕРТНАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2078324C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ДВИГАТЕЛЕЙ ВНУТРЕННЕГО СГОРАНИЯ И ЭКСПЕРТНАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2175120C2 |
| Устройство для измерения колебаний скорости вращения вала | 1985 |
|
SU1415192A1 |
| Устройство для измерения угла закручивания вращающегося вала | 1991 |
|
SU1795312A1 |
| Стабилизированный по скорости электропривод | 1980 |
|
SU964946A1 |
| Устройство компенсации влияния эксцентриситета прокатных валков | 1980 |
|
SU908455A1 |
| Устройство контроля параметров движения транспортного средства | 2019 |
|
RU2741668C1 |
| Способ определения цикловой подачи топлива в дизельном двигателе и устройство для его осуществления | 2021 |
|
RU2775798C1 |