С5) СТАБИЛИЗИРОВАННЫЙ ПО СКОРОСТИ ЭЛЕКТРОПРИВОД

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для стабилизации скоростиВРАщЕНия элЕКТРОпРиВОдА | 1979 |
|
SU811469A1 |
| Устройство для стабилизации скорости электродвигателя | 1972 |
|
SU498700A1 |
| Устройство для стабилизации скорости вращения | 1977 |
|
SU635587A1 |
| Электропривод постоянного тока | 1981 |
|
SU978304A1 |
| Устройство для стабилизации скорости вращения | 1981 |
|
SU1035763A2 |
| Устройство для стабилизации скорости вращения вала | 1981 |
|
SU1035762A1 |
| Устройство для управления многодвигательным электроприводом | 1984 |
|
SU1220098A1 |
| Устройство для стабилизации скорости электродвигателя | 1982 |
|
SU1035764A2 |
| Устройство для согласования углового положения синхронно-вращающихся валов электродвигателей постоянного тока | 1983 |
|
SU1100700A1 |
| Способ контроля угловых качаний ротора синхронного электродвигателя и устройство для его осуществления | 1980 |
|
SU917084A1 |
Г- ,
Из.обретение относится к электротехнике и может быть использовано в автоматизированном стабилизированном по скорости электроприводе, в состав которого входит бесконтактный электродвигатель постоянного тока.
Известен стабилизированный по скорости электропривод, включающий бесконтактный электродвигатель постоянного тока, выполненный на базе синхронной машины, датчик положения ротора, полупроводниковый коммутатор, импульсный датчик мacтotы вращения, логическое устройство измерения фазового рассогласования, входы которого соединены с выходом импульсного датчика частоты вращения и выходом задающего генератора, а выход : зан с первым входом схемы И, второй вход которой подключен к выходу датчика положения ротора, а выход - к i полупроводниковому коммутатору 11. :
Недостаток такого электропривода состоит в том, что вследствие редкой
частоты поступления информации о положении ротора при низкой частоте вращения трудно обеспечить стабилизацию угловой скорости с высокой томностью.
Наиболее близким техническим решением к изобретению является стабилизированный по скорости электропривод, содержащий основной и вспоfo могательный электродвигатели, каждый из KOTopbix снабжен системой управления и контуром регулирования, зада-4ющий генератор, а каждый контур регулирования включает связанные между
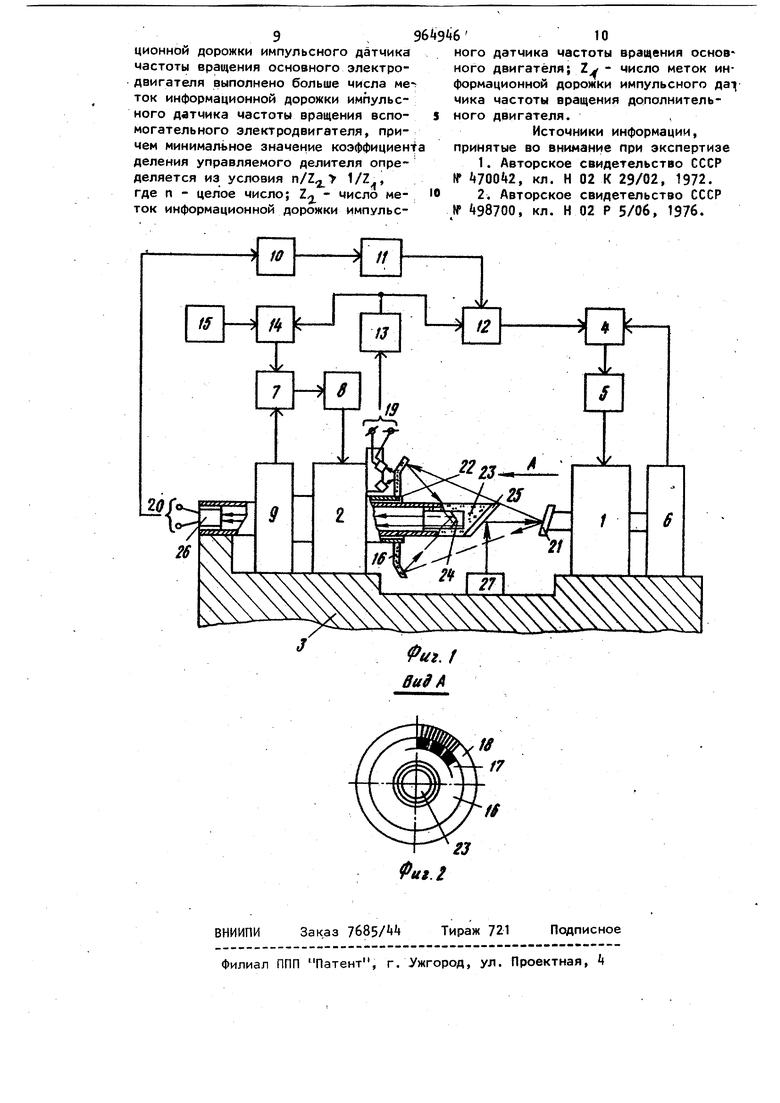
и собой формирователь импульсов и измеритель фазового рассогласования, выходом подключенный к системе управления соответствующего электродвигателя, импульсный датчик частоты вра20 «цения, электродвигателя с дисковым модулятором, снабженным информационной дорожкой и считывающим элементом, подключенным к входу формирователя импульсов, а задающий генератор подЭключен к второму входу измерителя фазового рассогласования контура регулироваф«я вспомогательного элек тродвигателя, первый вход которого дополнительно соединен с вторым входом измерителя фазового рассогласования контура регулирования основ-ного электродвигателя f 2 J. Однако известное устройство не позволяет стабилизировать частоту вращения основного электродвигателя ,в широком диапазоне, так как в известном устройстве частота вращения основного электродвигателя определяется только разностью в количестве Metok импульсных датчиков частот вра щения основного и дополнительного электродвигателей, которая постоянна. Цель изобретения - расширение диапазона стабилизации частот вращения основного двигателя. Поставленная цель достигается тем что в стабилизированный по скорости электропривод, содержащий основной и вспомогательный электродвигатели, каждый из которых снабжен системой управления и контуром регулирования задающий генератор, а каждый контур регулирования включает связанные между собой формирователь импульсов и измеритель фазового рассогласования, выходом подключенный к системе управления соответствующего электродвигателя, импульсный датчик частоты вращения электродвигателя с диско вым модулятором, снабженным информационной дорожкой и считывающим элементом, подключенным к входу фор мирователя импульсов, а задающий генератор подключен к второму входу измерителя фазового рассогласования контура регулирования вспомогательного электродвигателя, первый вход которого дополнительно соединен с вторым входом измерителя фазового рассогласования контура регулирования основного электродвигателя, вве ден управляемый делитель частоты с коэффициентом деления , включенный между формирователем импульсов измерителем фазового рассогласования контура регулирования основного электродвигателя, а число меток информационной дорожки импульсного датчика частоты вращения основного электродвигателя больше числа меток инфоомационкой -дорожки импульсного 4 датчика частоты вращения вспомогательного электродвигателя, причем минимальное значение коэффициента деления управляемого делителя определяется из условия ,где п - целое число} число меток информационной дорожки импульсного датчика частоты вращения основного двигателя; Z - число меток информационной дорожки импульсного датчика частоты вращения вспомогательного двигателя. На фиг. 1 представлена блок-схема стабилизированного по скорости электропривода; на фиг. 2 - вид А на фиг.1. Стабилизированный по скорости электропривод содержит.основной 1 и вспомогательный 2 электродвигатели, закрепленные соосно в станине 3- Основной и вспомогательный электродвигатели представляют собой бесконтакт, ные электродвигатели постоянного тока. / Каждый электродвигатель снабжен соответствующими системой управления и контуром регулирования. Система управления основного электродвигателя содержит последовательно соединенные между собой логическую схему А И и полупроводниковый коммутатор 5, подключенный к основному электродвигателю, на валу которого установлен датчик 6 положения ротора, связанный с одним входом логической схемы 4 системы управления. Система управления вспомогательного электродвигателя содержит последовательно соединенные между собой логическую схему 7 И и полупроводниковый коммутатор 8, подключенный к вспомогатель ному- электродви гателю, на валу которого установлен датчик 9 положения ротора, подключенный к-логической схеме 7 И системы управления..t I Каждый электродвигатель снабжен контуром регулирования. KoHfyp регулирования основного электродвигателя включает связанные между собой формирователь 10 импульсов, управляемый делитель 11 частоты и измеритель 12 фазового рассогласования, выход которого подключен к системе управления ( к другому входу логической схемы k И основного, электродвигателя. Контур регулирования вспомогательного электродвигателя содержит связанные между собой формирователь 13 импульсов и измеритель И фазового рассогласования, BbixoJtu подключенный к системе управления (другому входу логической схемы 7 И) вспомогательного электродвигателя. Второй вход измерителя Ц фазового рассогласования данного контура регулирования подключен к задающему генератору 15, а его первый вход дополнительно соединен с вторым входом измерителя 12 фазового рассогласования контура регулирования основного электродвигателя. Каждый контур регулирования снабжен импульсным датчиком скорости. Импульсные датчики скорости совмещены в одном узле, который может быть выполнен, например в виде оптико-механической системы, сна15женной дисковым модулятором 16, установленным на валу вспомогательного электродвигателя 2 и снабженнь1м двумя информационными дорожками 17 и 18 (фиг.2) и двумя считывающими элементами 19 и 20, причем информационная дорожка 17 и считывающий элемент 1 соответствуют импульсному датчику скорости контура регулирования вспо,могательного электродвигателя, а информационная дорожка 1У и считывающи элемент 20 - импульсному датчику ско рости контура регулирования основного электродвигателя. Причем в каждом контуре регулирования считывающий элемент импульсного датчика скорости связан с входом формирователя импульсов этого же контура регулирования. На валу основного электродвигателя 1 жестко закреплено подвижное зер кало 21, в полом валу дополнительного электродвигателя 2 установлен полый стержень 22, с одной стороны которого закреплена прозрачная обойма 23 с двумя.неподвижными зеркалами 2 и 25, а с другой - фотоприемник 26. На основании станины 3 закреплен осветительный элемент 27. Число меток Z информационной дорожки 18 импульсного датчика часто ты вращения основного электродвигателя 1 больше числа меток Z. инфор мационной дорожки 17 импульсного датчика частоты вращения вспомогательного электродвигателя 2 (Z. Z) а управляемый делитель 11 частоты выполнен с коэффициентом делений , где п - целое число, минимальное значение которого определяется из условия nlZ 1/Z . Частота вращения (об./мин) основного двигателя В этом случае определяется по выражению vCir Vi где f,.. ча.стота задающего генератора, Гц. В качестве бесконтактного импульсного датчика частоты вращения основного двигателя можно использовать любой другой датчик как оптико-механического, так и индукционного типов с Числом меток, удовлетворяющим вышеуказанным условиям. Устройство работает следующим образом. С задающего генератора 15 подаются импульсы на вход измерителя фа-. зового рассогласования 14. На другой его вход подаются импульсы с формирователя 13 импульсов, частота которых Пропорциональна угловой скорости вращения вала вспомогательного электродвигателя 2. Сигнал рассогласования по фазе между этими двумя частотными последовательностями импульсов подается на логическую схему И 7, на другой вход которой подается сигнал с датчика 9 положения ротора вспомогательного электр)двигателя 2. С выхода логической схемы И 7 сигнал через полупроводниковый коммутатор В подается на электродвигатель 2, что обеспечивает вращение вала вспомогательного электродвигателя синхронно с частотой задающего генератора 15. Последовательность импульсов обратной связи вспомогательного электродвигателя 2 с выхода формировате ля 13 импульсов одновременно подается на вход измерителя 12 фазового рассогласований, являясь в-этом слу чае опорной частотой для основного электродвигателя;t. На второй вход измерителя 12 фазового рассогласования через формирователь 10 импульсов, управляемый делитель 11 частоты со считывакпцего элемента 20 импульсного датчика частоты вращения основного электродвигателя подается последовательность импульсов, образуемых модуляцией светового потока осветительного элемента 27, информационной дорожкой 18 дискового модулятора 16. Прохождение луча осветительного элемента 27 на модулятор 16 обеспечивается неподвижным ; зеркалом 25 и подвижным зеркалом 21 жестко связанным с валом основного электродвигателя. С модулятора 16 9 промодулированныи луч приходит на зеркало оптически прозрачной обой мы 23 и, отражаясь на фотоприемник 26, возбуждает на выходе считывающего элемента 20 импульсного датчина частоты вращения основного эле тродвигателя импульсы, частота следования которых пропорциональна сумме угловых скоростей дополнительного и основного электродвигателей. Так как информационная дорожка 18 имеет число меток большее, чем информационная дорожка 17, то при неподвижном роторе основного электродвигателя 1 и при вращении ротора дополнительного электродвигателя 2 частота сигнала с импульсного датчика частоты вращения основного электродви,гателя значительно больше частоты сигнала с импульсного датчикачастоты вращения дополнительного элек тродвигателя. Наименьшее значение ...15й2ФФициента деления управляемого делителя 11 подбираются таки образц, чтобы обеспечить на выходе Сигнал с частотой, несколько меньшей частоты сигнала, поступающего с форм рователя 13 импульсов. Из-за разности чёстот сигналов, поступающих на ; входы измерителя фазового рассогласо вания, и при выборе направления вра;щения основного электродвигателя, противоположного эращению вспомогательного электродвигателя, ротор основного электродвигателя разгоняется до скорости, при которой частота сигнала на выходе управляемого де лителя 11 равна частоте сигнала на выходе формирователя 13 импульсов. При равенстве частот сигналов, поступающих на выходы измерителя 12 фа зового рассогласования, основной электродвигатель 1 входит в режим фа зового управления. Сигнал рассогла сования по фазе с измерителя 12 фазового рассогласования через логичеркую схему И k, на второй вход которой подается сигнал с датчика 6 положения ротора, через полупроводниковый коммутатор 5 подается на основной электродвигатель 1, тем самым обеспечивая его работу в режиме дискретно-фазовой стабилизации частоты вращения. Согласно представленному выражению для расчета частоты Ёращения ос новного электродвигателя i, при.соответствующем выборе числа меток информационных йорожек 17 и 18 моду 8 лятора 16 и указанной в описании выбора коэффициента деления управляемого делителя 11 частоты в электроприводе обеспечивается расширение дипазона стабилизируемых частот вращения основного электродвигателя более 1:1000. Так, используя задающий генератор с f3p 1200 Гц, импульсные датчики частоты вращения основного и вспомогательного двигателей с числами меток Z 27 и изменяя коэффициент делителя от до , можно получить диапазон стабилизируемых частот вращения от 10,5 об/мин до обУмин. При этом любая желаемая частота вращения основного двигателя в данном диапазоне может быть получена дополнительным изменением в небольших пределах частоты задающего генератора. Формула изобретения Стабилизированный по скорости электропривод, содержащий основной и вспомогательный электродвигатели, каждый из которых снабжен системой управления и контуром регулирования, задающий генератор, каждый контур . регулирования включает в себя связанные между собой формирователь импульсов и измеритель фазового рассогласования, выходом подключенный к системе управления соответствующего электродвигателя, импульсный датчик частоты вращения электродви гателя с дисковым модулятором, снабженным информационной дорожкой и считывающим элементом, подключенным к входу формирователя импульсов, а задающий генератор подключен к второму входу измерителя фазового рассогласования контура регулирования вспомогательного электродвигателя, первый вход которого дополнительно соединен с вторым входом измерителя фазового рассогласования контура регулирования основного электродвигателя, отличающийся тем, что, с целью расширения диапазона стабилизации частот вращения основного двигателя введен управляемый делитель частоты с коэффициентом деления , включенный между формирователем импульсов и измерителем фазового рассогласования контура регулирования основного электродвигателя , а- часло меток информа
