1
Известны электроприводы коррекционных рледяших систем резьбо- и зубообрабатываКзщих станков, выполненные в виде преобра- вователя, соединенного с малоинерционным электродвигателем, и дифференциала, уста- йовленного в цепи обката, j В коррекционных следящих системах таасие электроприводы работают в районе нуля р ошибка в системе обычно имеет .синусоищальный характер с частотой, зависящей от кинематической точности цепи и скорости рбработки материала.
I Недостатком известных электроприводов ;является наличие зоны нечувствительности IB тиристорном преобразователе, которая су щественно проявляется при частых реверсах, т. е. при обработке синусоидального Ьнгнала ошибки.
i Hajni4ne зоны нечувствительности з.начи- ;тельно снижает полосу пропускания системы электропривода, ухудшает его динамические качества, не позволяет отрабатьшать пик- |лические ошибки в кинематических цепях, ко1-орые по частоте значительно выше на:коплешпэ1х и меньше по амплитуде, т. е. для
отработки таких ошибок привод должен имен большую полосу пропускания в районе нуля.
Цель изобретения - улучшение динами-
ческих свойств электропривода следящих
систем, работающих в районе нуля.
I Это достигается тем, что в кинематичес-
:кую цепь предлагаемого электропривода введен вспомогательный электродвигатель, работающий с постоянной скоростью вращения, и вспомогательный дифференциал, к однокту из входов которого подсоединен в прямом направлении выходной вал малоинерционного
двигателя, ко второму входу в обратном направлении - вал вспомогательного двигателя и к выходу - основной дифференциал цепи обката.
: На тиристорный преобразователи:, подае --ся постоянный сигнал, который вызывает
постоянное вращение малоинершюнног-о электродвигателя со скоростью, равной ско(.10:сти вращения вспомогательного электродвигателя, в результате чего выходной вал
дифференциала неподвижен. Patx.-orjiacoBaiint;
.в системе, носящее синусоидальный харак-
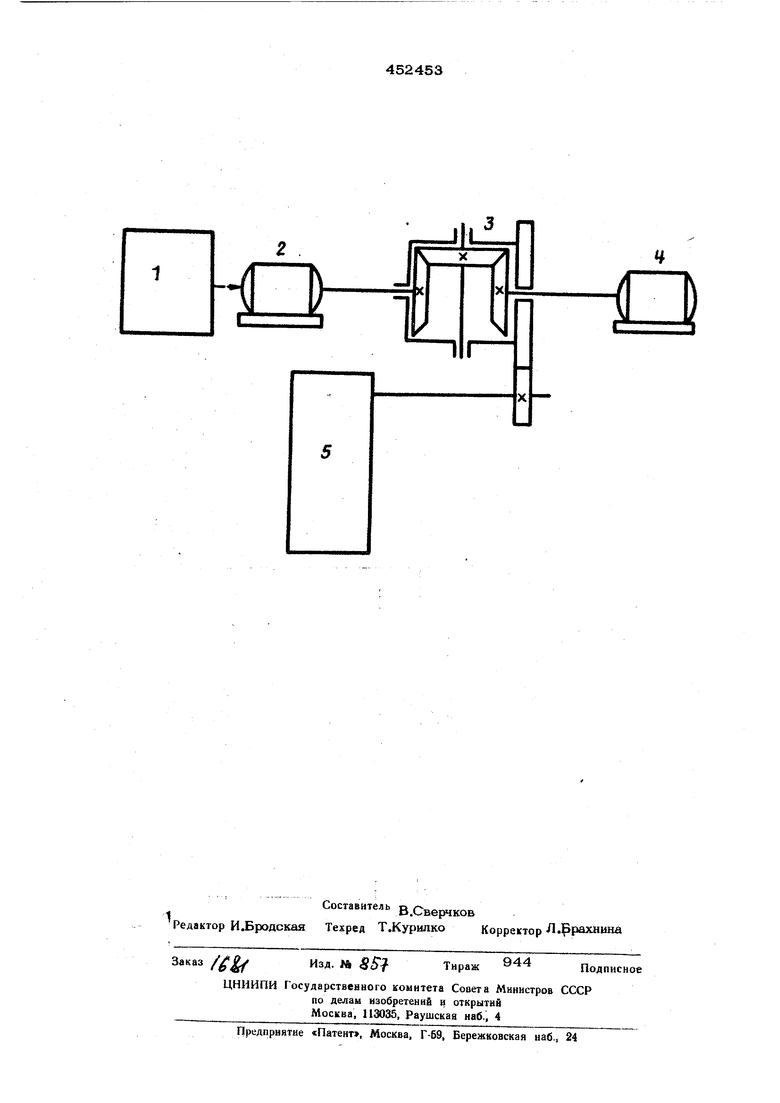
тер, в этом случае заставляет работи, малоинерционный двигатель не в районе ну ля, а на фоне постоянной скорости, что значительно улучшает динамические характеристики электропривода. На чертеже изображена схема предлагаемого привода. Привод состоит из тиристорного преобразователя 1, который управляет малоинерционным электродвигатедем 2 в функции угла рассогласования в следящей системе. Выход электродвигателя 2 соединен с одним из входов конического дифференциала ла 3, а с другой его вход - с валом вспомогательного электродвигателя 4 таким образом, что скорости вращений обоих электродвигателей вычитаются и при равенстве их выходной вал дифференциала неподвижен. Выходной вал дифференциала 3 связан с исполнительным механизмом 5 через основ- ной дифференциал цепи обката. Привод работает следующим образом. На вход тиристорного преобразователя 1 последовательно с сигналом ошибки подается постоянный сигнал величиной, превышающей максимальную амплитуду ошибки. При отсутствии сигнала ошибки малоинерционный электродвигатель 2 вращается с постоянной скоростью. На вспомогательный электродвигатель 4 подается напряжение такой величины, что он вращается со скоростью, равной скорости вращения коррекционного электродвигателя 2. Направления вращений обоих электродвигателей выбраны таким образом, что при отсутствии сигнала ошибки на входе тйристор ного преобразователя выходной вап дифференциала 3 неподвижен. Когда на вход тиристорного преобразователя поступает сигнал ошибки, носящий, как правило, синусоидальный характер, электродвигатель 2 отрабатывает их не в районе ну- ля, а на уровне постоянной скорости вращения. Это приводит к тому, что при отработке сигнала ошибки исключается переход через зону нечувствительности тиристорного преобразователя, что значительно повышает полосу пропускания электропривода и значительно улучшает его динамические качества. Предмет изобретения Привод коррекционных следящих систем резьбо- и зубообрабатывающих станков, выполненный в виде преобразователя, соединенного с малоинерционным электродвигателем ,, и дифференциала, установленного в цепи обката, отличающийся тем, что, с целью улучшения динамических свойств, в кинематическую цепь введен вспомогательный электродвигатель с постоянной скоростью вращения и вспомогатель- ный дифференциал, к одному из входов которого подсоединен в прямом направлении выходной вал малоинерционного двигателя, ко второму входу в обратном направлении -. вал вспомогательного двигателя и к выходу - дифференциал цепи обката.
1
| название | год | авторы | номер документа |
|---|---|---|---|
| Привод системы коррекции кинематических погрешностей | 1973 |
|
SU454971A1 |
| Реверсивный тиристорный электроприводпОСТОяННОгО TOKA | 1979 |
|
SU824393A1 |
| Реверсивный тиристорный электропривод постоянного тока | 1980 |
|
SU951614A1 |
| Устройство для управления электродвигателем постоянного тока | 1978 |
|
SU783938A1 |
| Способ управления электроприводом постоянного тока | 1982 |
|
SU1150721A1 |
| Электропривод постоянного тока | 1979 |
|
SU917291A1 |
| Устройство для управления электроприводом постоянного тока | 1981 |
|
SU1001405A1 |
| Устройство для управления антенной корабельной радиолокационной станции по курсовому углу | 1974 |
|
SU1841193A1 |
| Устройство для управления электроприводом постоянного тока | 1980 |
|
SU900392A1 |
| Способ управления тиристорным электроприводом и устройство для его осуществления | 1980 |
|
SU879723A1 |