1
Изобретение относится к коррекционным системам зубо- и резьбообрабатывающих стаиков.
Известны электромеханические системы коррекции цепи обкатки зубо- и резьбообрабатывающих станков с электроприводами, содержащие датчики, измеряющие кинематические погрешности цепи обкатки в процессе работы и управляющие силовым преобразователем электропривода, двигатель которого через дифференциал включен в цепь обкатки и компенсирует кинематические ошибки цепи. Силовой преобразователь привода питает малоинерциоиный электродвигатель.
Однако электропривод известных систем работает в районе нуля, т. е. при отсутствии ошибок скорость двигателя равна нулю, а при наличии ошибок направление вращения зависит от знака ошибки. Современные быстродействующие электроприводы при работе в районе нуля имеют значительно худшие динамические свойства, чем при работе в режиме непрерывного вращения, так как они обладают зоной нечувствительности. Например, полоса пропускания гармонического сигнала у современных тиристорных электроприводов с широтно-импульсной модуляцией сильно зависит от скорости вращения, и на малых скоростях (до 10 об/мин) составляет всего 1- 2 ГЦ против 70-80 гц (для скорости
100 об/мин). Это не позволяет корректировать циклическую составляющую ошибки цепи обкатки, имеющей частоты по 5-10 гц и малые амплитуды.
Целью изобретения является улучшение динамических свойств электропривода, в частности расширение полосы пропускания, при работе с сигналами ошибки, имеющими составляющие высоких частот как с малыми, так и с большими амплитудами.
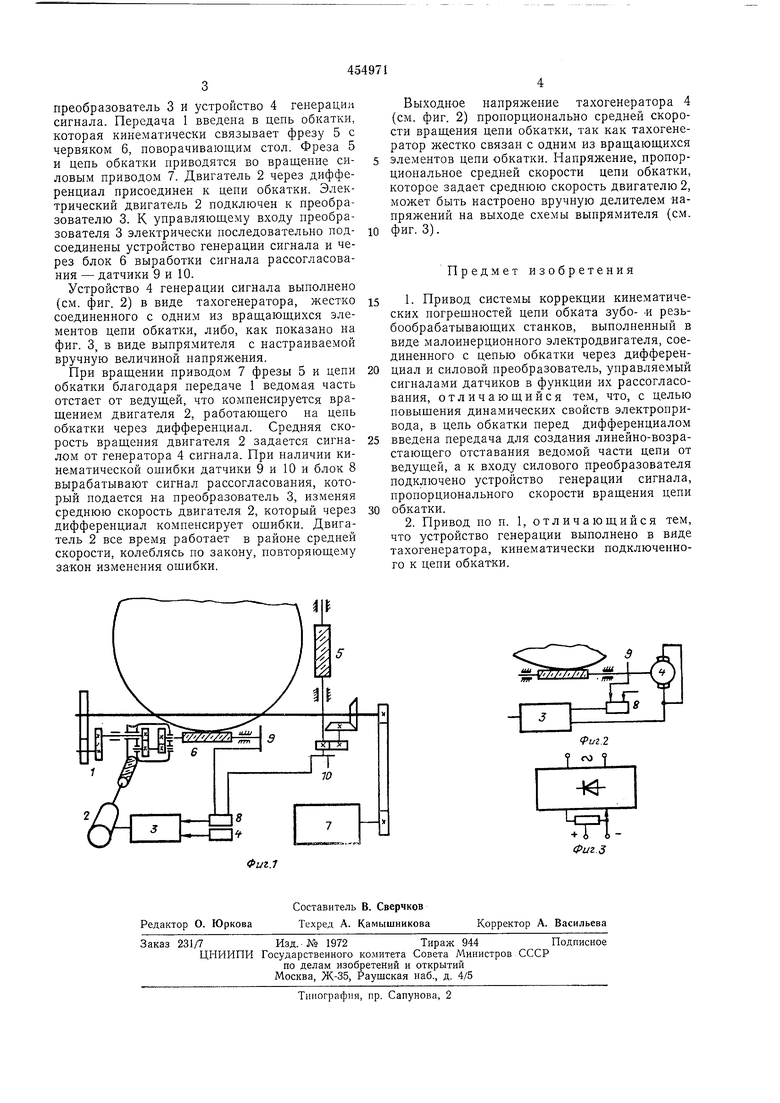
Это достигается тем, что в цепь обкатки перед дифференциалом введена передача для создания линейно-возрастающего отставания ведомой части цепи от ведущей и к входу силового преобразователя дополнительно подключено устройство генерации, сигнал которого пропорционален скорости вращения цепи обкатки. Устройство генерации сигнала выполнено в виде тахогенератора, кинематически подключенного к цепи обкатки. Устройство генерации сигнала может быть выполнено также в виде выпрямителя с настраиваемой вручную по сигналам датчика величиной напряжения.
На фиг. 1 изображен предлагаемый привод системы коррекции кинематической погрешно сти; на фиг. 2 и 3 - варианты устройства ге нерации сигнала.
Привод содержит дополнительную передачу 1, двигатель 2, систему коррекции, силовой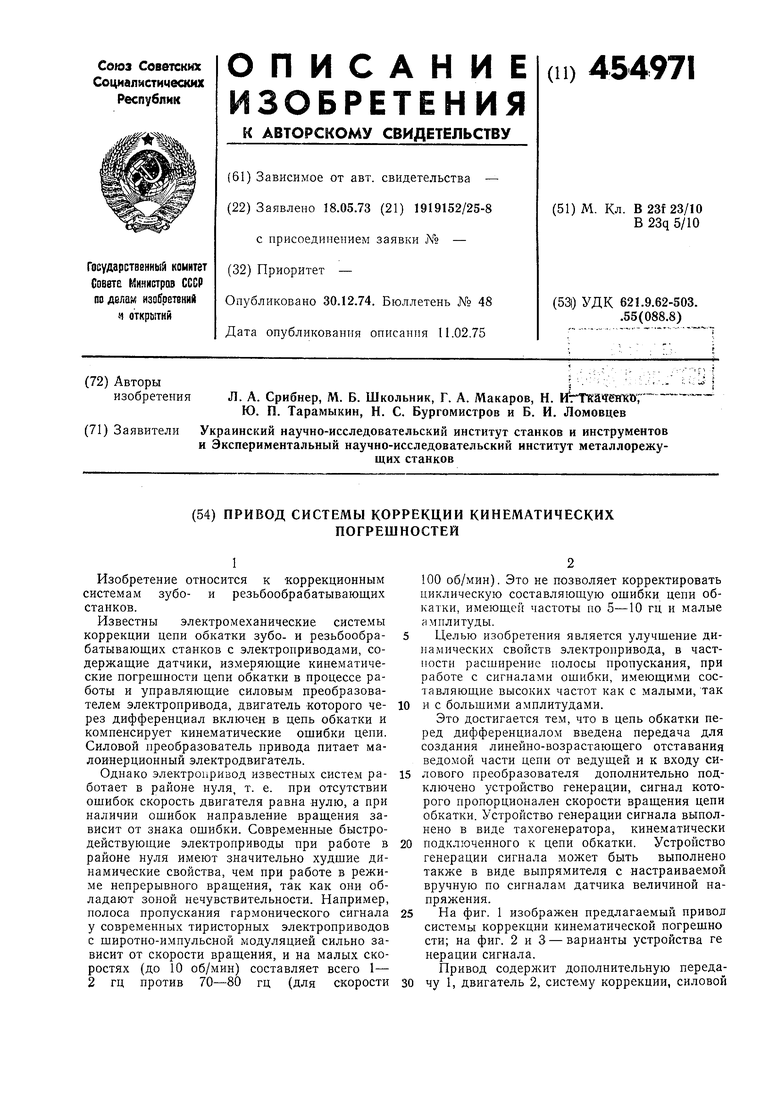
| название | год | авторы | номер документа |
|---|---|---|---|
| Привод коррекционных следящих систем резьбо-и зубообрабатывающих станков | 1973 |
|
SU452453A1 |
| Способ управления электроприводом постоянного тока | 1982 |
|
SU1150721A1 |
| Многодвигательный электропривод | 1991 |
|
SU1774457A1 |
| СЛЕДЯЩИЙ РУЛЕВОЙ ЭЛЕКТРОПРИВОД | 2024 |
|
RU2832922C1 |
| Позиционный электропривод | 1983 |
|
SU1124255A1 |
| Устройство частотного управления асинхронным электроприводом | 2017 |
|
RU2660460C1 |
| ВПТб | 1973 |
|
SU398353A1 |
| Реверсивный электропривод | 1983 |
|
SU1116514A1 |
| Электропривод постоянного тока | 1986 |
|
SU1384170A1 |
| Реверсивный электропривод постоянного тока | 1977 |
|
SU736321A1 |
