1 ти воспроизведения эксплуатационных режимов работы транспортного средства. Стенд содержит четырехзвенный дифференциальньй механизм 1 планетарного типа, два звена 2, 3 которого через зубчатые колеса 4, 5, 6 и 7, 8 кинематически соединены с выходными валами 9, 10 испытьшаемой моторно-трансмиссионной установки 11 , Третье звено 12 четырехзвенного дифференциального механизма 1 планетарного типа связано с инерционной массой 13 и тормозом 14. С четвертым звеном 15 жестко связано ведущее звено 16 передачи. В режиме прямолинейного движения выходные
Изобретение относится к транспортному машиностроению и может быть использовано при стендовых испытаниях мотор но-трансмиссионных установок, преимущественно гусенич- -ных транспортных средств.
Цель изобретения - повышение точности йоспроизведения эксплуатационных режимов работы транспортного средства.
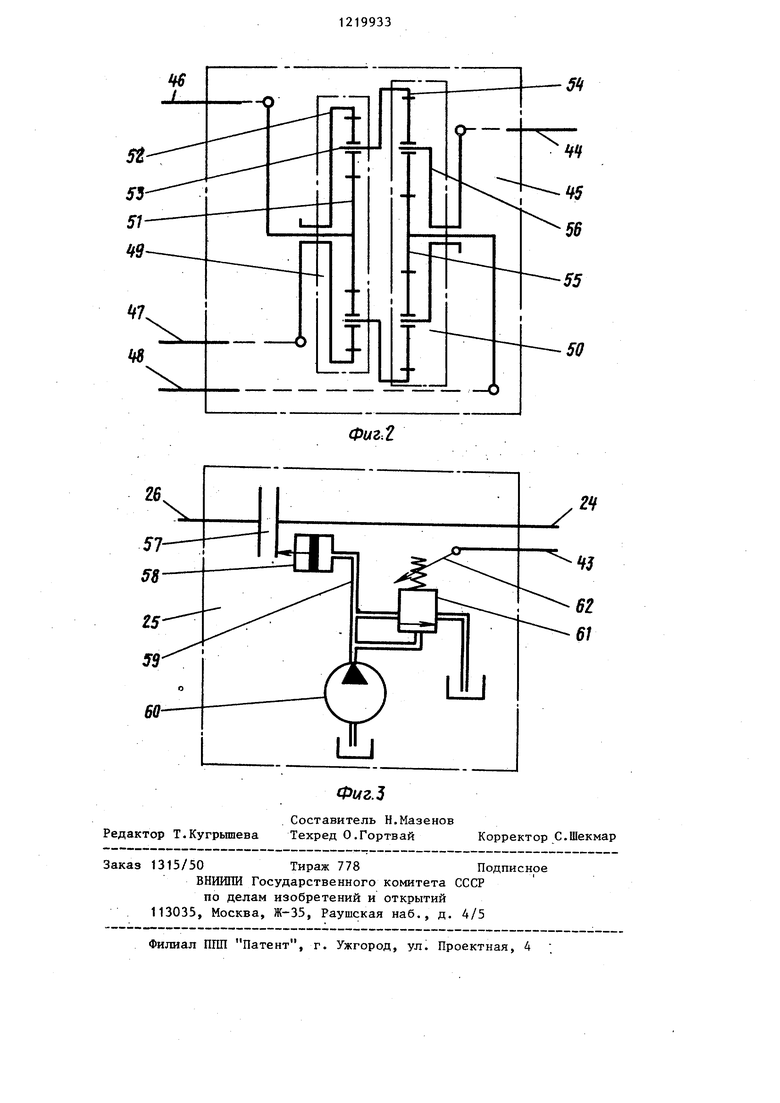
На фиг. 1 изображена кинематическая схема стенда; на фиг. 2 - кинематическая схема сумматора, на фиг. 3 - общая схема управляемого ограничителя крутящего момента.
Стенд содержит четырехзвенный дифференциальный механизм 1 планетарного типа, два звена 2 и 3 которого через соответствующие зубчатые колеса 4-8 кинематически соединены с выходными валами 9 и 10 испытываемой моЛрно-трансмиссионной установки 1 1 Третье звено 12 четырехзвенного дифференциального механизма 1 планетарного типа связано с инерционной массой 13 и тормозом 14. С четвертым звеном 15 четырехзвенного дифференциального механизма 1 планетарного типа жестко связано ведущее звено 16 передачи, ведомое звено 17 которой кинематически соединено с дополнительным тормозом 18, выполненным в виде гидронасоса 19, имеющего регулятор 20 производительности и
19933
валы 9 и 10 испытываемой моторно- трансмиссионной установки 11 вращаются с одинаковьти угловыми скоростями. При подборе передаточных отношений зубчатых колес 4, 5, 6 и 7, 8 и четьфехзвенного дифференциального механизма 1 планетарного типа его четвертое-) звено 15 будет неподвижным, а третье звено 12 будет вращаться с угловой скоростью, имитирующей скорость движения транспортного средства при прямолинейном движении. Сопротивление движению имитируется тормозом 14, а воздействие инерционных нагрузок - инерционной массой 13. 3 шт.
дроссель 21 с регулирующим органом 22, включенньй посредством системы обратных клапанов в нагнетательную линию гидронасоса 19. С ведущим звеном 16 посредством зубчатого колеса 23 кинематически соединено входное звено 24 управляемого ограничителя 25 крутящего момента, выходное звено 26 которого соединено с дополнительной инерционндй массой 27. Дополнительная инерционная масса 27 посредством зубчатого колеса 28 кинематически соединена с ведомым звеном 17 передачи. Третье звено 12 четырехзвенного дифференциального механизма 1 планетарного типа кинематически соединено с входным звеном 29 первого измерительного (центробежного) преобразователя 30 угловой скорости. Ведущее звено 16 передачи кинематически соединено с входным звеном 31 второго измерительного (центробежного) преобразователя 32 угловой скорости. Выходное звено 33 первого измерительного преобразователя 30 связано с регулятором 34 масштаба выходного сигнала, соединен- ньм с вькодным звеном 35 второго мерительного преобразователя 32 угло- вой скорости, регулятор 36 масштаба выходного сигнала которого вьшолнен с автономной настройкой. Автономная настройка регулятора 36, характеризующая коэффициент сопротивления по-
3
вороту, осуществляется с помощью рычага 37 и контролируется по шкале 38. Выходное звено 33 первого измер тельного преобразователя 30 угловой скорости кинематически соединено с входным звеном 39 первого исполнительного механизма, выходное звено 40 которого кинематически соединено с регулирующим органом 22 дросселя 21. Выходное звано 35 второго измерительного преобразователя 32 угловой скор ости кинематически соединено с входным звеном 41 второго исполнительного механизма, выходное звено 42 которого кинематически соединено с регулятором 20 производительности гидронасоса 19, Регулятор 43 управляемого ограничителя 25 крутящего момента связан с выходом 44 сумматора 45, первый вход 46 которого связан с регулятором 36 автононой настройки масштаба выходного сигнала второго измерительного преоразователя 32 угловой скорости посредством рычага 37, второй вход 47 - с выходным звеном 35 второго измерительного преобразователя 32 угловой скорости и третий вход 48 - с выходным звеном 33 первого измерительного преобразователя 30 угловой скорости.
Сумматор 45 (фаг.2) содержит два планетарных ряда 49 и 50. Первое звено 51 планетарного ряда 49 кинематически соединено с первым входом 46, второе 52 - с вторым входом 47, а третье 53 - с вторым звеном 54 второго планетарного ряда 50, перво звено 55 которого кинематически соединено с третьим входом 48, а третье 56 - с выходом 44.
Управляемый ограничитель 25 крутщего момента (фиг.З) содержит управляемую фрикционную муфту 57, установленную между входным 24 и выходным 26 звеньями и снабженную гидроцилиндром 58 включения, гидромаги- страпь 59 запитки которого соединен с автономным источником 60 давления и через регулируемый клапан 61 - со сливом. Регулируемый орган 62 регулируемого клапана 61 соединен с регулятором 43.
Предлагаемый стенд работает следующим образом.
В режиме прямолинейного движения выходные валы 9 и 10 испытьтаемой моторно-трансмиссионной установки
33
11 вращаются с одинаковыми угловыми скоростями. При соответствующем подборе передаточных отношений зубчатых колес 4-8 и четьфехзвенного дифференциального механизма 1 планетарного типа его четвертое звено 15 будет неподвижным, а третье звено 12 будет вращаться с угловой скоростью, имитирующей скорость движения транспортного средства при прямолинейном движении. Сопротивление прямолинейному движению будет имитироваться тормозом 14, а воздействие инерционных нагрузок - инерционной массой 13,
, Для воспроизведения режимов движения транспортного средства на повороте включают механизм поворота в испытываемой моторно-трансмиссионной установке 11. При этом вьйсодные валы 9 и 10 будут вращаться с различными угловыми скоростями. В результате четвертое звено 15 четырехзвен- ного дифференциального механизма 1 планетарного типа начинает вращаться
с угловой скоростью, определяемой разностью угловых скоростей вращения выходных валов 9 и 10, и характеризует радиус поворота транспортного средства. Угловая скорость вращения .
третьего звена 12 будет характеризовать линейную скорость движения центра масс транспортного средства при повороте.
Вращение третьего 12 и четвертого
15 звеньев будет передаваться соответственно входными звеньями 29 и 31 измерительных преобразователей 30 и 32 угловой скорости. Под действием центробежной силы грузов выходные
звенья 33 и 35 этих измерительньЬс преобразователей начнут перемещаться в осевом направлении в соответствии с изменением частоты вращения входных звеньев 29 и 31 и настройки регуляторов 34 и 36 масштаба выходного сигнала. Выходные звенья 33 и 35 будут воздействовать на входные звенья 39 и 41 исполнительных механизмов. Выходное звено 40 первого исполнительного механизма воздействует на регулирукщий орган 22 дросселя 20, устанавливая его в определенное положение, имитируя тем самым зависимость сопротивления повгроту от скорости движения транспортного средства. Выходное звено 42 второго исполнительного механизма воздействует на регулятор 20 производительности
5
гидронасоса 19, устанавливая его определенную производительность и имитируя тем самым зависимость сопртивления повороту от радиуса поворота. При одной и той же угловой скорости вращения входного звена 31 второго измерительного преобразователя 32 перемещение его выходного звена 35 будет зависеть от настройки регулятора 36 масштаба выходного сигнала, которая- имитирует коэффициент сопротивления повороту. Так как перемещение регулятора 34 масштаба выходного сигнала первого измерительного преобразователя 30 угловой скорости определяется положением выходного звена 35 второго измерительного преобразователя 32 угловой скорости, характеризующим радиус .поворота, то тем самым будет имитироваться зависимость коэффициента пропорциональности между скоростью движения центра масс транспортного средства и сопротивлением повороту от радиуса поворота.
При установке регулирующего органа 22 дросселя 21 и регулятора 20 производительности в соответствующие положения на валу гидронасоса 19 будет создаваться суммарное сопротивление, характеризукнцее рассогласование ведущих моментов на выходных валах 9 и 10, соответствующее заданной разности угловых скоростей этих валов, т.е. движению транспортного средства на повороте с заданным радиусом поворота, коэффициентом сопротивления повороту и скорости движения центра масс транспортного средства.
При настройке регулятора 36 автономной настройки масштаба выходного сигнала второго измерительного преобразователя 32 угловой скорости посредством рычага 37 на определенную величину, имитирукщую заданные свойства грунта, сигнал этой настро кй поступает на первьй вход 46 сумматора 45. Сигнал измерения радиуса поворота транспортного средства посредством перемещения выходного звена 35 этого измерительного преобразователя 32 поступает на второй вход 47, а сигнал изменения скорости движения транспортного средства посредством перемещения выходного звена 33 первого измерительного преобразователя 30 угловой скорости поступает на третий вход
9933 6
48 сумматора 45. Перемещение первого входа 46 вызывает поворот на не-- которьпй угол первого звена 51 планетарного ряда 49, а перемещение вто- 5 рого входа 47 вызывает поворот второго звена 52 планетарного ряда 49. Пропорционально углам поворота первого 51 и второго 52 .звеньев происходит поворот третьего звена 53 пла0 нетарного ряда 49. Таким образом, в первом планетарном ряду 49 на третьем звене 53 суммируются перемещения первого 46 и второго 47 входов сумматора 45. Второе звено 54
5 планетарного ряда 50, соединенное с третьим звеном 53 планетарного ряда 49, совершает поворот на тот же угол, что и звено 53. Перемещение третьего входа 48 вызывает по0 ворот первого звена 55 планетарного ряда 50. Пропорционально углам поворота первого 55 и второго 54 звеньев происходит поворот третьего звена 56 планетарного ряда 50, что
5 вызывает перемещение выхода 44, ко- . торое пропорционально перемещениям всех трех входов сумматора 45. При перемещении выхода 44 сумматора 45 перемещается регулятор 43 управляе0 мого ограничителя 25 крутящего момента, соединенный с регулирующим органом 62 регулируемого клапана 61. Это приводит к -уменьшению давления в гидромагистрали 59 и в гидроцилиндJ ре 58. В результате уменьшается усилие сжатия фрикционных элементов муфты 57 и соответственно величина пре дельно крутящего момента, передаваемого фрикционной муфтой 57, и нагру- Q жающего механизмы поворота испытываемой моторно-трансмиссионной установки 11. Тем самым имитируется движение транспортного средства на повороте с частичным заносом, когда 5 уже существует движение по направлению поперечной оси, но имеется еще движение по направлению продольной оси при уменьшенном сопротивлении повороту.
При имитации полного заноса, когда -момент сопротивления повороту транспортного средства равен нулю, посредством регулятора 43 обеспечивается свободное соединение гидромагистрали 59 со сливом, разрьшается кинематическая связь между входным 24 и выходным 26 звеньями, испытываемая моторно-трансмиссионная уста7
новка 11 отключается от дополнительной измерительной массы 27 и тормоза 18, т.е. ее механизм поворота полностью разгружается.
Таким образом, в предлагаемом стенде имитируется ограничение сопротивления повороту транспортного средства от скорости движения при различных радиусах поворота в различных дорожных условиях при срьте грунта в период наступления заноса, что повьшает точность воспроизведения эксплуатационных режимов работы транспортного средства.
Формула изобретения
Стенд для испытания моторно- трансмиссионной установки транспортного средства, включающего испытываемую трансмиссию с двумя выходными валами, содержащий.четырехзвенный дифференциальный механизм планетарного типа, два звена которого кинематически соединены с соответствунхцими выходными валами испытываемой трансмиссии, инерционную массу и тормоз, кинематически соединенные с третьим звеном четырехзвенного дифференциального механизма планетарного типа, .передачу, ведущее звено которой жестко соединено с четвертым звеном |Че тьфехзвенного дифференциального механизма планетарного типа, дополнительный тормоз, кинематически соединенный с ведомым звеном передачи и вьшолненный в виде гидронасоса,, имекщего регулятор производительности и дроссель с регулирующим органом включенный посредством системы обратных клапанов в нагнетательную линию гидронасоса, дополнительную инерционную массу, установленную в кинематической цепи между ведущим и ведомым звеньями передачи, первый измерительный преобразователь угловой скорости, входное звено которо338
го кинематически соединено с третьим звеном четьфехзвенного дифференциального механизма планетарного типа, второй измерительный преобразователь
угловой скорости, выходное звено которого связано с регулятором масштаба выходного сигнала первого измерительного преобразователя, а регулятор масштаба выходного сигнала
выполнен с автономной настройкой, первый исполнительный механизм, входное звено которого кинематически соединено с выходным звеном первого измерительного преобразователя уг-
ловой скорости, а выходное - с регулирующим органом дросселя, и второй исполнительньй механизм, входное звено которогЪ кинематически соединено с выходным звеном второго измерительного преобразователя угловой- скорости, а выходное - с регулятором производительности гидронасоса, отличающийся тем, что, с целью повышения точности воспроизведения эксплуатационных режимов работы транспортного средства, он снабжен управляемым ограничителем крутящего момента, входное звено которого кинематически соединено с ведущим звеном передачи, а
выходное - с дополнительной инерционной массой, и сумматором, первый вход которого кинематически соединен с регулятором автономной настройки масштаба выходного сигнала вторрго измерительного преобразователя угловой скорости, второй вход - с выходным звеном второго измерительного преобразователя угловой скорости,
третий вход - с выходным звеном первого измерительного преобразователя угловой скорости, а выход - с. регулятором управляемого ограничителя крутящего момента, при этом входное
звено второго измерительного преобра зователя угловой скорости кинематически соединено с ведущим звеном передачи.
Фиг.2
26
Редактор Т.Кугрьппева
Фиг.З
Составитель Н.Мазенов Техред О.Гортвай
1315/50 Тираж 778Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Филиал ПГШ Патент, г. Ужгород, ул. Проектная, 4
Корректор С.Шекмар

| название | год | авторы | номер документа |
|---|---|---|---|
| Стенд для испытания моторно-трансмиссионной установки транспортного средства | 1982 |
|
SU1086354A2 |
| Стенд для испытания моторно-трансмиссионной установки транспортного средства | 1978 |
|
SU706727A1 |
| Стенд для испытаний моторно-трансмиссионной установки транспортного средства | 1979 |
|
SU881559A2 |
| Стенд для испытаний моторно-трансмиссионной установки транспортного средства | 1979 |
|
SU873003A2 |
| Стенд для испытаний моторно-трансмиссионной установки транспортного средства | 1980 |
|
SU949380A2 |
| Стенд для испытания моторно-трансмиссионной установки транспортного средства | 1987 |
|
SU1422056A1 |
| Стенд для испытания моторно-трансмиссионной установки транспортного средства | 1982 |
|
SU1092369A1 |
| Стенд для испытания моторно-трансмиссионной установки транспортного средства | 1989 |
|
SU1652856A2 |
| Стенд для испытаний моторно-ТРАНСМиССиОННОй уСТАНОВКи ТРАНСпОРТ-НОгО СРЕдСТВА | 1979 |
|
SU813165A2 |
| Гидромеханическая трансмиссия транспортного средства | 1975 |
|
SU610689A1 |
Изобретение относится к стендам для испытания моторно-трансмис- сионных установок, преимущественно гусеничных транспортных средств. Цель изобретения - повышение точнос2/22 19 го 27 f 5 6 3 3 t1 Ю 7-/ L 48 47 30 29 ан i 37 46 Фиг. 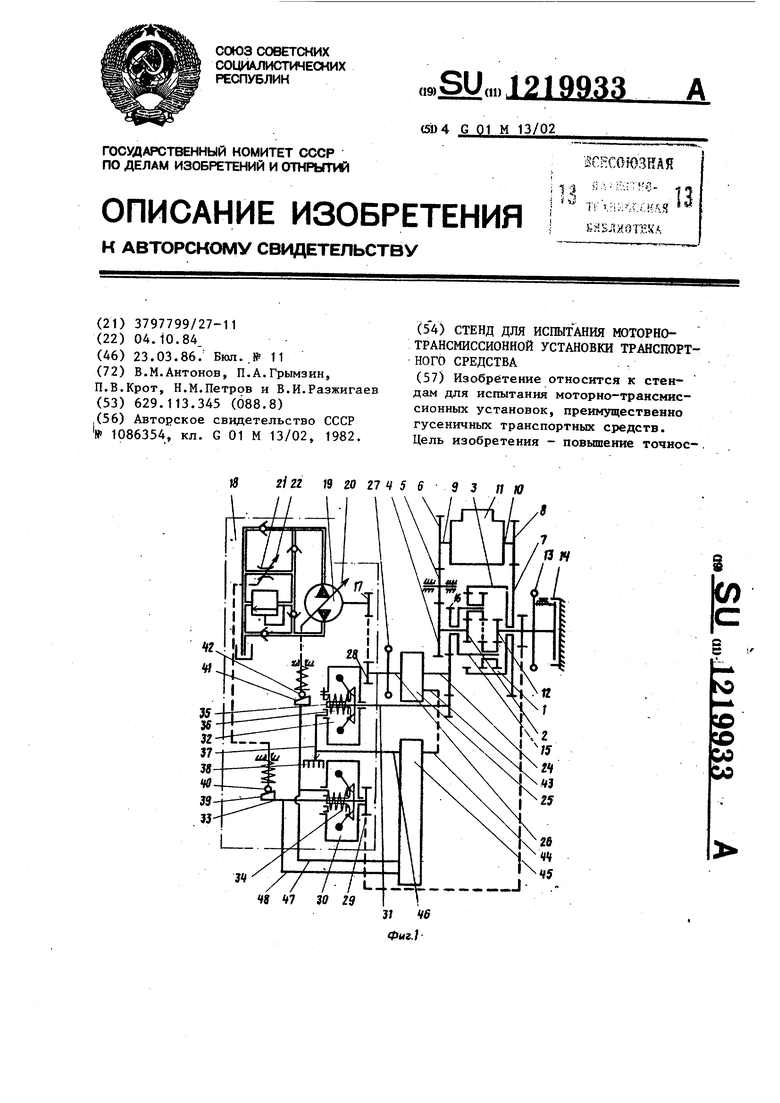
| Стенд для испытания моторно-трансмиссионной установки транспортного средства | 1982 |
|
SU1086354A2 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
