Изобретение относится к автоматическому регулированию двигателей внутреннего сгорания.
Известны автоматические дистанционные системы управления для двигателя внутреннего сгорания, содержащие задатчик режима с логическим блоком управления) связанным-двумя каналами при помощи двух пар последовательно установленных в них логических элементов И и ИЛИ с электрогидравлическим преобразователем) подключенным к сервомеханизму органа управления частотой вреицения, соединенного с логическим блоком управления при помощи датчика положения, выполненного в виде кулачкового механизма с. переключателем 1 .
Недостатком известных систем является то, что автоматическое управ ление режимами двигателя возможно для фиксирования режимов, количество которых определяется числом пар кулачков и переключателей, а автоматический вывод двигателя на любой режим невозможен ..
Цель изобретения - автоматизация процесса управления скоростным режимом.
Для достижения поставленной цели система снабжена двухканальнымблоком автоматического управления режимами с усилителями, снабженными логическими элемен тамиИЛИ,дополнительным автономным электрогидравлическим преобразователем и двумя аналоговыми датчиками обратной связи по положению валика сервомеханизма и по частоте вращения,
10 причем усилители через логические элементы ИЛИ подк.шочены к дополните, льному автономному электрогидравлическому преобразователю, а оба аналоговых датчика и задатчик режима 15к входу блока автоматического ущзавления режимами.
Блок автоматического -управления режимами снабжен двумя сумматорами широкой и узкой зонынечувствительносг20
ти с двумя каналами -управления, причем к сумматору узкой зоны нечувствительности подключен аналоговый датчик по частоте вращения, а к сумматору широкой зоны нечувствительнос25ти - аналоговый датчик положения валика сервомеханизма.
Сумматор узкой зоны нечувствительности снабжен каналом управления для связи с усилителями, в котором уста30новлен логический элемент И.
Двухканальный блок автоматическо го управления режимами снабжен широтно-импульсным модулятором и инверт ором HEJ а канал у правленияузкой зоны нечувствительности перед усилителями - логическим элементом к которому через широтно-импульсный модулятор подключен сумматор узкой зоны нечувствительности., а через ин вертор НЕ - сумматор широкой зоны нечувствительности.
Аналоговый датчик по положению валика сервомеханизма снабжен амортизаторами для установки на двигате.ле и вибропоглощающим элементом для кинематической связи с сервомеханиз мом.
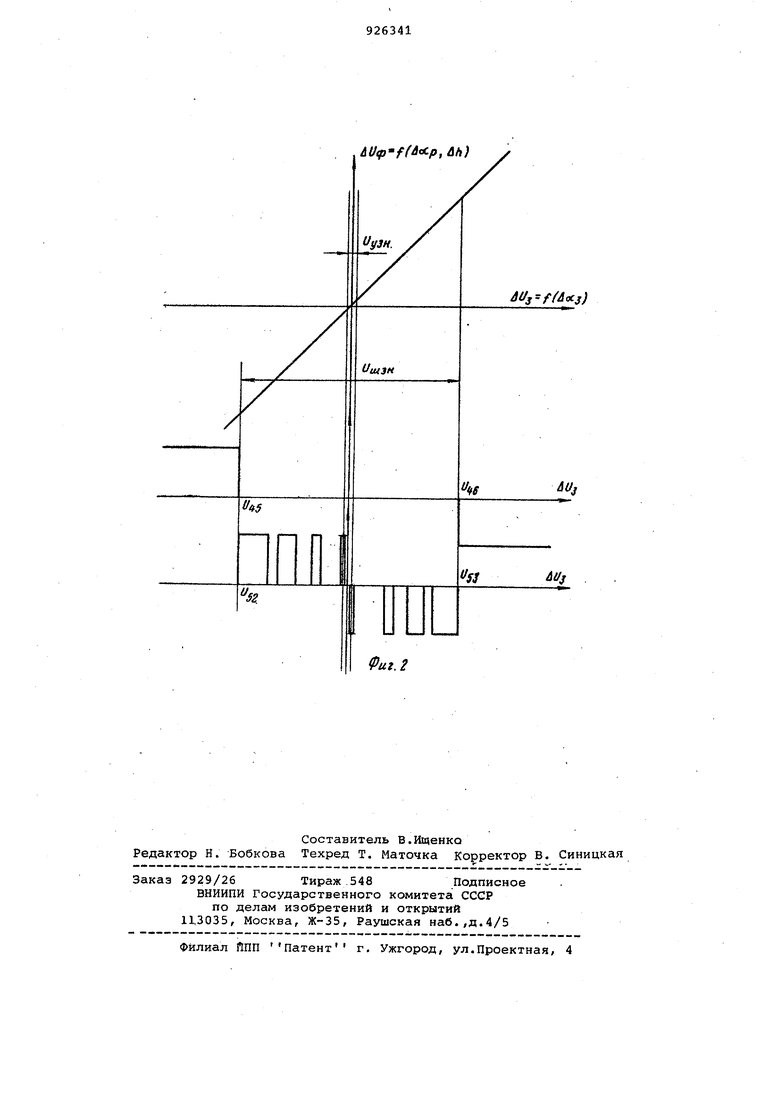
На фиг. 1 представлена схема сиетемы; на фиг.2 - графики фактического напряжения на датчике обратной связи п в зависимости от изменени напряжения задания л Uj.
Двигатель 1 снабжен местным постом 2 управления с органом 3 управЛенин частотой вращения и органом 4 переключения реверсивного устройства двигателя.
С органом 4 кинематически соединен сервомеханизм 5, выходной валик которого снабжен кулачковым механизмом содержащим кулачо,к 6, взаимодействующий в положении Вперед
(в ) с переключателем 7, кулачок 8 - в положении Холостой ход (XX) с переключателем 9 и кулачок 10 - в положении Назад (Н) с переключателем 11.
С органом 3 соединен сервомеханизм 12 при помощи кинематической связи 13, снабженной упругим звеном 14 переменной длины.
Сервомеханизм 12 снабжен датчиком положения, выполненным в виде кулачкового механизма, взаимодействующего в положении Пуск (Упор реверсирования) с переключателями (кулачок 15 с переключателем 16 и кулачок 17 с переключателем 18). Сервомеханизм 12 также соединен вибропоглощающим элементом 19 с аналоговым датчиком 20 обратной связи по положению валика сервомеханизма 12. Датчик 20 установлен на двигателе на амортизаторах 21.
Сервомеханизм 12 подключен двумя параллельными гидравлическими каналами Б (Больше) и М (Меньше1 У к электрогидравлическим преобрё рователям (ЭГП) 22 и 23, к дополнительному автономному электрогидравлическому преобразователю 24
Для регулирования скорости отработки сервомеханизма 12 в гидравлические каналы встроены дроссели 25 28.
Задатчик 29 режима через переключатель 30 подключен к ЭГП посредством логического блока управления (.ЛБУ) 31, связанного двумя каналами (Б )с ЭГП22 и одним каналом с ЭГП 23.
В каналы связи ЛБУ 31 с ЭГП 22 включены две пары последовательно установленных логических-элементов П и ИЛИ, элемент И 32 и элемент ИЖ 33 в канале М, элемент И 34 и элемент ИЛИ 33 в канале Б соответственно. В канал связи ЛБУ 31 с ЭГМ 23 включены логические элементы И 32 и ИЖ 36.
Переключатели 16 и 18 датчика 20 обратной связи по положению валика сервомеханизма 12 соединены с ЛБУ 31.
Задатчик 29 через переключатель 30 в двухканальном блоке автоматического управления режимами 37(бАУР) подключен к двум масштабным элементам 38 и -39, соединенныл с сумматором 40 широкой зоны нечувствительности (ШЗН) и сумматором 41 узкой зоны нечувствительности (УЗН), К сумматорам 40 и 41 через масштабные элементы 42 и 43 подключены аналоговые датчики , 20 по положению валика сервомеханиз ма 12 и 44 - частоты вращения коленчатого вала двигателя соответственно. Сумматор 41 через два усилителя 45 и 46, логические элементы ИЛИ 47 и 48
М ЭГП 24.
подключены к кангшам
Сумматор 41 через широтно-импульсный модулятор 49 подключен к установленному в канале управления логическому элементу И 50, к которому через инвертор НЕ 51 также подключен сумматор 40. Элемент И 50 через усилители 52 и 53 подключен к элементам ИЖ 47 и 48,
Усилители .45, 46, 52 и 53 через логические элементы ИЛИ 47 и 48 подключены к дополнительному автономному электрогидравлическому преобразователю 24. Сервомеханизм 5 связан электрогйдравлическим преобразователем (ЭГП) 54 с ЛБУ 31.
Фактическое напряжение (.см, фиг. 2 на датчике обратной связи ь Uqa гфедставлено н функции
(, ixli) .
где ,р - изменение Положения исполнительного органа регулятора;
д п - изменение частоты вращения двигателя.
Изменение напряжения задания л Uj в функции ( ) где 4k J - изменение положения задатчика режима;
UyiH U(y - напряжение на сумматорах 41 и 42 соответственно узкой и широкой зон нечувствительности;
Llt,5 Цце sC напряжение на усилителях Usi 45,46,52 и 53. Из графика видно, как происходит фор миро-вание управляющих импульсов в системе. Система может работать в режиме дистанционного управления с разомкнутой обратной связью и режиме автоматическом (следящем) - с аналоговой обратной связью по положению валика сервомеханизма и частоте вращения коленчатого вала двигателя. Система в режиме с разомкнутой обратной связыо работает следующим образом. При установке переключателя 30 |на работу с ЛБУ 31, при получении команды от задатчика 29-логический блок 31 преобразует ее в сигналы для ЭГП 54 и ЭГП 22 и 23. При помощи ЭГП 54 , соединенного гидравлическими {Каналами с сервомеханизмом 5, в последний устанавливают орган 4 местног поста двигателя 1) в одно из положений Н, XX и В. В положении разрешается управ ление органом 3 управления частотой вращения. При подаче от задатчика 29 через логический блок 31 и элемент ШИ .35 ригнала подканалу Б на ЭГП 22 последний подает рабоч ю жидкость в сер вомеханизм 12, перемещая его выходно орган и через кинематическую связь 1 орган 3 местного поста 2 двигателя 1 на увеличение частоты вращения. При подаче сигнала через ЛБУ 31 и элемен ИЛИ 33 по каналу м на ЭГП 22, орган 3 перемешается на уменьшение час тоты вращения. При плавном уменьшении частоты вращения двигателя (сигнал на ЭГП 2i не поступает от блока 31 и рабочая жидкость в механизм 12 поступает через два дросселя 25 и 26) прекращени перемещения органа 3 в точке Пуск (Упор реверсирования) достигаетсч при опускании переключателей 16 и 18 взаимодействующих в этой точке с кулачками 15 и 17 соответственно. Поскольку взаимная фикйация органов 3 и 4 местного поста 2 жесткая, при неточной остановке механизма 12 может произойти заклинивание блокировочного механизма поста 2 или повышенные механические напряжения в механизме 12, кинематической связи 13 или посту 2. Для исключения этого в кинематической связи предусмотрено упругое звено 14 переменной длины. Это позволяет изменять длину кинематической связи 13, не создавая нагрузок , на пост 2 или механизм 12. При быстром уменьшении частоты вращения двигателя сиг«ал на ЭГП 23 доступает от ЛБУ 31 через элемент -И 32 только при нажатом переключателе 16. Рабочая жидкость подае;тся в меанизм через один дроссел-ь 26, а россель 25 шунтируется открытием ЭГП 23. Возможен излишний выбег меанизма 12, этом устанавливается малая частота вреицения, при которой двигатель при реверсировании может заглохнуть. Во избежание этого, при замыкании переключателя 18, подается сигнал, через элемент И 34, при на его втором входе сигнала от переключателя 7 по каналу Б, через элемент ИЛИ 35 по каналу Б на ЭГП 22. Сигнал с ЭГП 23 при этом снимается и происходит медленное увеличение частоты вращения до размыкания переключателя 18. Система в режиме с замкнутой обратной связью работает следующим образом. При изменении задат шком 29 установившегося режима двигателя на величину угла, больше определяемого широкой зоной нечувствительности (ШЗН), на выходе сумматоров 40 и 41 появляется разностный сигнал в виде напряжения & и Uop - (фиг. 2). В зависимости от знака сигнала ytp и i или Ucp-ii- и, на усилителе 45 или 46 появится управляющий сигнал,который через элемент ИЛИ 47 или 48 поступает на дополнительный автономный ЭГП 24. При подключении к ЭГП 24 элемента ИЛИ 47 ЭГП через дроссели 27 и 28 подает рабочую жидкость в механизм 12, нагфимер, на уменьшение частоты вращения, при подключении элемента ИЖ 48 ЭГП 24 подает рабочую жидкость в механизм 12 через дроссели 27 и 28 на увеличение частоты вращения. При перемещении валика механизма 12 в аналоговом датчике 20 обратной связи, связанным с ним.кинематичесКИМ устройством 19, вь ходное нагфяжение его изменяется таким образом, что бы компенсировать напряжение задания. В положении) когда валик механизма 12 входит в широкую зону нечувствительности л UujSH О, на выходе сумматора 40 управляющий сигнал исчезает, но сохраняется на сумматоре 41. На выходе элемента И 50 за счет работы схемы широтно-импульсного модулятора 49 появляется управляющий широтно.-модулированный импульсный сигнал. Этот сигнал через усилитель 52 или 53 и элемен7 ИЛТ 47 или 48 воздействует на ЭГП 24 для подачи рабочей жидкости в механизм 12. По мере уменьшения разности заданной и фактической частоты вращения за счет работы схемы широтноимпульсного модулятора 49, длительность управляющего импульса уменьшается, а скважность (время между
двумя последовательными импульсами) увеличивается. Это позволяет обеспечить плавное управление изменением .1а двигателя без перерегулирова ния. Точность работы системы определяется шириной узкой зоны нечувствительности, длительностью управляющего импульса и др. факторами и может быть доведена , при минимальной .Длительности импульса 0,2 - 0,4 с, ,до 0,5% от номинальной частоты вращения двигателя.
При неизменном задании режима, но при изменении частоты врахцения двигателя в пределах узкой зоны система работает как -корректор частоты вращения коленвала.
Применение системы позволяет повысить точность управления режимами двигателя, обеспечить автома1тическое управление как с участием оператора, так и при работе с ЭВМ.
Канал управления с разомкнутой обратной связью в этой системе рассматривается в качестве дублирующего j резервного. Наличие двух следящих каналов управления (по положению механизма 12 и по фактическому параметру) позволяет в аварийных случаях (выход из строя одного из каналов ) обеспечить управление двигателем.
Формула изобретения Автоматическая дистанционная система управления для двигателя внутреннего сгорания, содержащая задатчик режима с логическим блоком управления, связанным двумя каналами при помощи двух пар последовательно установленных в них логических с элементов И и ИЛИ с электрогидравлическим преобразователем, подключенным к сервомеханизму органа управления частотой вращения, соединенного с логическим блоком управления
при помощи датчика положения, вы-.
полненного в виде кулачкового механизма с переключателем, о т л и чающаяся тем, что, с целью автоматизации процесса управления скоростным режимом, система снабжена
5 дйухканальным блоком автоматического управления режимами с усилителями, снабженными логическими элементами ИЛИ,дополнительным автономным электрогидравлическим преобразователем
0 и двумя аналоговыми датчиками обратной связи по положению валика сервомеханизма и по частоте вращения,при|чем усилители через логические эле-/ менты ИЛИ подключены к дополнительному автономному электрогидравлическому преобразователю, а оба аналоговых датчика и задатчик режима - к входу блока автоматического управления режимами.
QИсточники информации,
принятые во внимание при экспертизе
1. Авторское свидетельство СССР № 580338, кл. F 02 D 1/12, 1977.
AUtp-ff p, uh)
)
Фиг, г
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматическая и дистанционная система для управления судовым двигателем внутреннего сгорания | 1982 |
|
SU1078116A1 |
| Система дистанционного и автоматического управления двигателем внутреннего сгорания | 1982 |
|
SU1059237A1 |
| Система дистанционного управления для двигателя внутреннего сгорания | 1979 |
|
SU855238A2 |
| Система дистанционного управления для двигателя внутреннего сгорания | 1980 |
|
SU889880A2 |
| Система дистанционного управления для двигателя внутреннего сгорания | 1975 |
|
SU580338A1 |
| Система автоматического и дистанционного управления многодвигательной силовой установкой | 1980 |
|
SU924418A1 |
| Устройство для дистанционного управлениядВигАТЕлЕМ C PEBEPC-РЕдуКТОРНОй пЕРЕдАчЕй | 1978 |
|
SU838663A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ДИСТАНЦИОННЫЙ ПРИВОД ДЛЯ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 2011 |
|
RU2466288C1 |
| Система дистанционного управления двигателем внутреннего сгорания | 1980 |
|
SU866255A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ДИСТАНЦИОННЫЙ ПРИВОД С НЕСКОЛЬКИМИ ПОСТАМИ УПРАВЛЕНИЯ | 2003 |
|
RU2256105C1 |