1
Изобретение относится к области автоматического управления судовыми установками, в частности лшоговальными, в которых на каждый вал работает свой двигатель.
Известна система управления установкой из нескольких силовых агрегатов, кинематически связанных с общим выходным валом, содержащая регуляторы режимов каждого агрегата, соединенные выходными звеньями с дозирующими органами топливоподачи и снабженные управляющими блоками каждого агрегата, взаимодействующими с переключателем режима работы 1.
Известная система обеспечивает синхронную работу агрегатов, однако отсутствует возможность управления каждым из них в отдельности и в любой комбинации.
Известна также система управления многовальной судовой силовой установкой, в которой на каждый вал работает свой двигатель, содержащая установленные на пульте управления ручные задатчики режимов каждого из двигателя и многопозиционный командный орган с переключателем на выходе, нропорционально-интегральный регулятор, входы которого нодключены к датчику и задатчику скорости хода судна, а выход - к одному из входов сумматора, другой вход которого подключен к одному из ручных задатчиков режимов двигателя, и следящие исполнительные механизмы в цепи атравления каждым из двигателей 2.
Иедостатком этой системы является то, что она не нозволяет реализовать различные программы нагрузки двигателей, что является необходимым в случае, когда установка состоит из двигателей различной мощности. Система не позволяет таклче сохранить дистанционное уиравление установкой в случае выхода из строя датчиков оборотов двигателей или скорости хода судна.
Целью изобретения является pacnjHjieHHe функциональных возможностей системы и повышеиие ее надежности.
Это достигается тем, что она снабл сна установленным на выходе сумматора дополннтельиым следящи.м исполнительным механизмом и кинематическн связанным с ним валом с установленными на нем по чнс.чу двигателей кулачками, дополнительными подпружииенными задатчикамп, взаимодействующими с кулачками, устройствами временного программироваиия, каждое из которых нодключено к выходу соответствующего дополнительиого задатчика, масштабирующим устройством, включенным между входом одного из ручных задатчиков режимов двигателя и одним из входов переключателя многопозициоиного командного органа и переключателем
выбора вида управления, неподвижные контакты которого подключены к следящим исполнительным механизмам в цени уиравле1И1я каждым двигателем, а иодвили ый контакт соединен с выходом миогопозиционного командного органа.
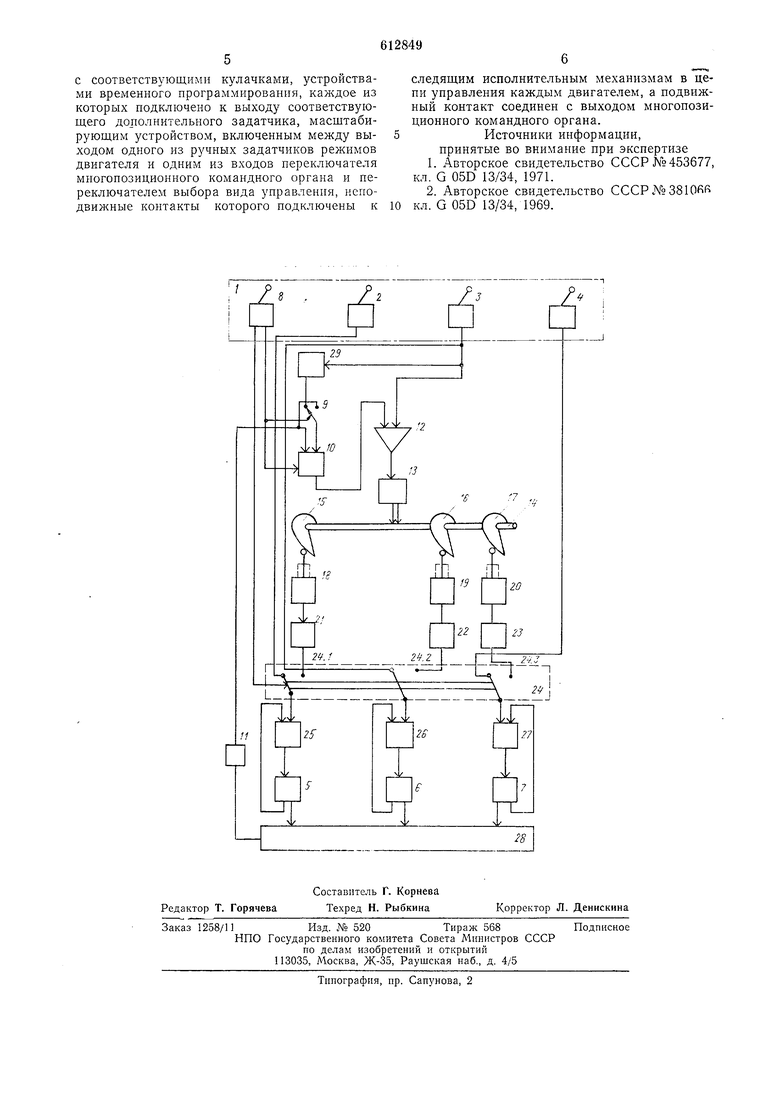
Ма чертеже изобра кена функциональная схема системы управления, например, трехвальиой судовой силовой установкой.
Система содержит установленные на пульте 1 управления ручные задатчики 2, 3 и 4 режимов каждого из двигателей 5, 6 и 7, миогоиозиционный командный орган 8 с переключателем 9 на выходе, иропорциоиально-иитегральный регулятор 10, входы которого подключены к задатчику (на чертел е не показан) скорости хода, входящему в состав командного органа 8, и датчику И скорости хода судна, а выход - к одному из входов сумматора 12, другой вход которого подключен к одному из ручных задатчиков, например 3. Выход сумматора 12 подключен ко входу дополнительного следящего исцолиительного механизма 13, с которым кинематически связан вал 14 с установленными на нем кулачками 15, 16 и 17, взаимодействующими с дополнительными подпружиненными задатчиками 18, 19 и 20, выходы которых подключены соответственно через устройства 21, 22 и 23 временного программирования и переключатель 24 выбора вида управления с неподвил.нымн 24.1, 24.2, 24.3 и подвилотым 24.4 контактами к следящим исполнительным механизмам 25, 26 и 27 в цепях управления двигателями 5, 6 и 7, приводящими в судно 28.
Подвил ный контакт 24.4 переключателя 24 соединен с выходом командного органа 8. Система содерлшт также масштабирующее устройство 29, включенное между выходом одного из ручных задатчиков, например 3, и одним из входов регулятора 10.
Система работает следующим образом.
При включении командного органа на релшм раздельного управления двигателями переключатель 24 своими контактами подключает следящие исиолнительные механизмы 25, 26 и 27 непосредственно к ручным задатчикам 2, 3 и 4 и управление каждым двигателем ведется независимо от других двигателей.
В релшме совместного управления двигателями 5, 6 и 7 переключатель 24 подключает механизмы 25, 26 и 27 к выходам дополпительных задатчиков 18, 19 и 20 через устройства 21, 22 и 23. В этом режиме переключатель 9 подключает оба входа регулятора 10 к датчику 11 скорости хода судиа для приведения его выходного сигнала к нулю. Сигнал с ручного задатчика 3, выбранного, например, для совместного управления, поступает на сумматор 12, и, слолшвшись с нулевым сигналом от регулятора 10, проходит без изменения на дополнительный следящий исполнительный механизм 13, разворачивающий вал 14 с кулачками 15, 16 и 17, которые воздействуют иа дополнительные задатчики 18, 19 и
20, изменяющие задание всех двигателей одновременно.
Так как кулачки 15, 16 и 17 имеют регулируемый профиль, то кал-сдому двигателю молчет быть задана индивидуальная нрограмма. Устройства 21, 22 и 23 позволяют ВЫ1ЮЛ11И1Ь эту программу оптимальной во времени.
11ри установке органа 8 в полол.ение унравления скоростью хода судна 28 переключатель 9 подсоедипяет один из входов peiyлятора 10 к масгитабирующе.му устройству z,. При задании определенной скорости задатчиком 3 сигнал с него через устройство 29 поступает на вход регулятора iO и через сумматор 12 к мехаиизму 13, который разворачивает общий вал 14. Скорость прохождения сигпала по последней цепи ничем не ограничивается, поэтому командные сигналы в цепях управления двигателями начинают изменяться с максимально допустимой скоростью, определяемой устройствами 21, 22 и 23.
Так как масштабирующее устройство выполнено с таким коэффициентом преобразования, что увеличение величины задания скорости всегда больше, чем увеличение команды на входе сумматора 12, то носле исполнения мехапизмами 25, 26 и 27 команды от задатчика 3 заданная скорость достигнута нс будет. Для достижения ее треб)ется дополнительное увеличение задания механизмам 2о, 26 и 27. Это осуществляется регулятором ю, сравнивающим сигнал на выходе устройства 29 и датчика 11 и вырабатывающего сигнал коррекции на сумматор 12.
с истема позволяет осуществлять переходы с одного управления па другой при сохрапении оптимальпости управления и обеспечивает повышепие надел ности управления.
Формула изобретен и я
Система управления многовальной судовой силовой установкой, в которой на вал
работает свой двигатель, содержащая установленные на пульте управления ручиые задатчики .мов калсдого из двигателя и многопозиционный командный орган с переключателем на выходе, пропорциональио-интегральный регулятор, входы которого подключены к датчику и задатчику скорости хода судпа, а выход к одному из входов сумматора, другой вход которого подключен к одному из ручных задатчиков двигателя, и следящие исполнительные механизмы в цепи управления каждым из двигателей, отличающаяся тем, что, с целью расширения функциональных возможпостей системы и повышения надел :ноети, она снабжена установленпым на выходе сумматора дополнительным следящим исполнительным механизмом и кинематически связанным с ним валом с установленными на нем по числу двигателей кулачками, дополнительпыми подпрулсипенными задатчиками, взаимодействующими
с соответствующими кулачками, устройствами временного программирования, каждое из которых подключено к выходу соответствующего дополнительного задатчика, масщтабирующим устройством, включенным между выходом одного из ручных задатчиков режимов двигателя и одним из входов переключателя многопозиционного командного органа и переключателем выбора вида управлення, неподвижные контакты которого подключены к
следящим исполнительным механизмам в цепи управления каждым двигателем, а подвижный контакт соединен с выходом многопозидионного командного органа.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР №453677, кл. G 05D 13/34, 1971.
2.Авторское свидетельство СССР .N9 3810fifi кл. G 05D 13/34, 1969.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления судовой многодвигательной установкой | 1980 |
|
SU965899A1 |
| Система управления судовым главнымдВигАТЕлЕМ и ВиНТОМ РЕгулиРуЕМОгОшАгА | 1979 |
|
SU844479A2 |
| ДИСТАНЦИОННЫЙ ПРИВОД УПРАВЛЕНИЯ СУДОВЫМ ДВИГАТЕЛЕМ | 2003 |
|
RU2238880C1 |
| Система дистанционного управленияСудОВОй СилОВОй уСТАНОВКОй | 1979 |
|
SU822146A1 |
| Система управления судовым двигателем со статическим регулятором частоты вращения | 1978 |
|
SU941240A1 |
| Устройство для управления двигателем внутреннего сгорания | 1980 |
|
SU901580A1 |
| Устройство автоматического управления курсом судна | 1989 |
|
SU1716485A1 |
| СИСТЕМА ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2003 |
|
RU2256811C1 |
| Система управления судовой многодвигательной установкой | 1977 |
|
SU679483A1 |
| СПОСОБ И СИСТЕМА УПРАВЛЕНИЯ МНОГОДВИГАТЕЛЬНОЙ СИЛОВОЙ УСТАНОВКОЙ ТРАНСПОРТНОГО СРЕДСТВА | 2007 |
|
RU2369522C2 |
