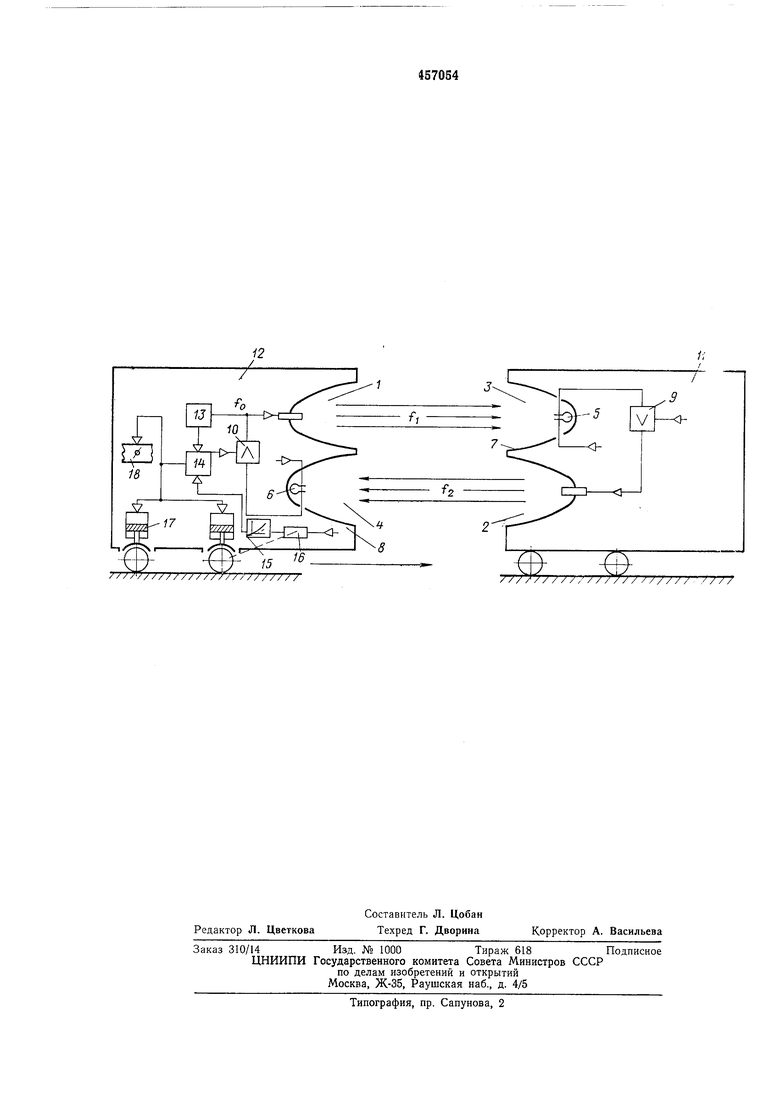
Изобретение относится к области приборостроения и может применяться на различных видах транспорта. Известны устройства для предотвращения столкновения движущихся объектов, содержащее блок определения расстояния между объектами, состоящий из излучателя колебаний, приемника ответных сигналов, усилителя дискриминатора, блок определения безопасной дистанции с датчиком скорости, блок сравнения, один из входов которого соединен с выходом блока определения безопасной дистанции, другой - с выходом дискриминатора, а выход - с исполнительным механизмом снижения скорости объекта. С целью улучшения эффективности работы устройства путем повышения точности определения расстояния между объектами и автоматического выдерживания безопасности дистанции выход приемника ответных сигналов подключен ко входам излучателя, образующего с приемником колебательный контур, и дискриминатора, настроенного на диапазон резонансных частот этого контура, определяемых дистанцией между объектами, а блок определения безопасной дистанции снабжен нелинейным преобразователем, включенным между датчиком скорости и одним из входов элемента сравнения. На че|ртеже представлена схема устройства, содержащего излучатели 1, 2 и приемника 3, приемник ответных сигналов 4, акустико-тшевматические преобразователи 5, 6 в фокусах концентраторов 7, 8 акустической энергии, инверсный 9 и прямой 10 усилители мощности, размещенные на движущихся объектах 11, 12 и соединенные в акустический колебательный контур с резонансной частотой /о, зависящей от расстояния а между объектами, пневмагический частотный дискриминатор 13; указанные элементы входят в блок определения расстояния а между объектами. Выход дискриминатора 13 подключен к одному из входов блока сравнения 14, ко второму входу которого подключены нелинейный функциональный преобразователь 15 и пневматический датчик скорости 16, соединенные последовательно и образующие блок определения безопасности дистанции для данной скорости. Выход блока сравнения соединен с исполнительным механизмом снижения скорости объекта, состоящим из элементов привода тормозов 17 и открытия дроссельной заслонки 18 подачи топлива. Работа устройства происходит следующим образом. П|ри расстояниях между объектами, превышающих критическое , т. е. таких, при которых из-за малой мощности принимаемого
сигнала не срабатывают акустико-пневматичеокие преобразователи, излучатель 1 движущегося сзади объекта 12 работает в режиме непрерывного излучения акустической энергии с частотой fi. Так как на этих дистанциях приемник 3 движущегося впереди объекта 11 находится вне зоны действия акустического сигнала излучателя 1, то на выходе преобразователя 5 все это время поддерживается выходной сигнал, подаваемый на инверсный усилитель мощности 9. На выходе усилителя давление остается на нулевом уровне и на вход излучателя 2, воздух не поступает.
Таким образом, на дистанциях с работает лишь излучатель 1 с частотой fi.
При сближении объектов до расстояния приемник 3 оказывается в зоне действия излучателя 1, в результате чего срабатывает преобразователь 5 и, как следствие этого, начинает работать на частоте /2 излучатель 2, установленный на движущемся впереди объекте 11.
Энергия излучателя 2 улавливается приемником ответных Сигналов 4, в фокусе концентратора 8 которого установлен преобразователь 6, на выходе приемника 4 давление равно О, в результате с выхода прямого усилителя 10 воздух не поступает к излучателю 1, что ведет к прекращению излучения энергии на частоте fi.
Прекращение излучения энергии на частоте fi ведет к срабатыванию преобразователя 5, что служит сигналом к прекращению излучения энергии излучателем 2 на частоте fz- Происходит последовательное срабатывание преобразователя 6, прямого усилителя 10, излучателя 1 и т. д., т. е. в акустическом контуре возбуждаются колебания с резонансной частотой /о, зависящей от расстояния а между объектами. При этом частота fo тем выше, чем меньше расстояние а.
Генерируемые колебания давления с частотой fo преобразуются дискриминатором в сигнал давления, пропорциональный частоте /о (и соответственно расстоянию между объектами), который подается на один из входов
блока сравнения 14, на второй вход которого подается сигнал, формируемый датчиком оборотов 16 и нелинейным функциональным преобразователем 15. На выходе датчика 16 устанавливается давление, пропорциональное скорости движения объекта. Давление, поданное на нелинейный преобразователь 15, преобразуется в последнем в сигнал, пропорциональный безопасной для данной скорости движения дистанции, заранее известной для данного типа объекта. Полученный в блоке сравнения 14 сигнал рассогласования, пропорциональный разности, расстояний, управляет механизмом снижения скорости объекта, например, элементами привода тормозов 17 и открытия дроссельной заслонки 18.
При этом происходит торможение до тех пор, пока расстояние между объектами будет
минимально безопасным.
Предмет изобретения
Устройство для предотвращения столкновения движущихся объектов, содержащее блок определения расстояния между объектами, состоящий из излучателя колебаний, приемника ответных сигналов, усилителя и дискриминатора, блок определения безопасной дистанции с датчиком скорости, блок сравнения, один из входов которого соединен с выходом блока определения безопасной дистанции, другой - с выходом дискриминатора, а выход - с исполнительным механизмом снижения скорости объекта, отличающееся тем, что, с целью улучщения эффективности работы устройства
путем повышения точности определения расстояния между объектами и автоматического выдерживания безопасной дистанции, выход приемника ответных сигналов подключен ко входам излучателя, образующего с приемником колебательный контур, и дискриминатора, настроенного на диапазон резонансных частот этого контура, определяемых дистанцией между объектами, а блок определения безопасной дистанции снабжен нелинейным преобразователем, включенным между датчиком скорости и одним из входов элемента сравнения.

| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРОАКУСТИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2010 |
|
RU2451300C1 |
| Устройство предотвращения столкновений движущихся объектов | 1980 |
|
SU926611A1 |
| СПОСОБ ДАЛЬНЕГО ОБНАРУЖЕНИЯ И ОТПУГИВАНИЯ КИТОВ ОТ СКОРОСТНЫХ ПАССАЖИРСКИХ СУДОВ | 2007 |
|
RU2342680C2 |
| СПОСОБ ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ МОРЕПЛАВАНИЯ СУДОВ С БОЛЬШОЙ ОСАДКОЙ И ВОДОИЗМЕЩЕНИЕМ | 2007 |
|
RU2342681C2 |
| СПОСОБ ПОИСКА МЕСТОРОЖДЕНИЯ ПОЛЕЗНЫХ ИСКОПАЕМЫХ С ИСПОЛЬЗОВАНИЕМ ПОДВОДНОГО ГЕОФИЗИЧЕСКОГО СУДНА | 2010 |
|
RU2424538C1 |
| ПОДВОДНЫЙ ЗОНД | 2010 |
|
RU2436119C1 |
| СПОСОБ ОБНАРУЖЕНИЯ, РАСПОЗНАВАНИЯ И ВЫТЕСНЕНИЯ ПОДВОДНЫХ ОБЪЕКТОВ ОТ МОРСКОЙ НЕФТЕГАЗОВОЙ ПЛАТФОРМЫ | 2010 |
|
RU2434245C2 |
| СПОСОБ ОБНАРУЖЕНИЯ, ИДЕНТИФИКАЦИИ И ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННЫХ КООРДИНАТ ОБЪЕКТОВ ПРИ ВСПЛЫТИИ ПОДВОДНОГО АППАРАТА | 2005 |
|
RU2308052C1 |
| ГИДРОАКУСТИЧЕСКАЯ СИНХРОННАЯ ДАЛЬНОМЕРНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ПОЗИЦИОНИРОВАНИЯ ПОДВОДНЫХ ОБЪЕКТОВ В НАВИГАЦИОННОМ ПОЛЕ ПРОИЗВОЛЬНО РАССТАВЛЕННЫХ ГИДРОАКУСТИЧЕСКИХ МАЯКОВ-ОТВЕТЧИКОВ | 2011 |
|
RU2483326C2 |
| СПОСОБ ПОИСКА МЕСТОРОЖДЕНИЯ ПОЛЕЗНЫХ ИСКОПАЕМЫХ С ИСПОЛЬЗОВАНИЕМ ПОДВОДНОГО ГЕОФИЗИЧЕСКОГО СУДНА | 2011 |
|
RU2480793C2 |