1;
Изобретение относится к подъем.но-транспортному машиностроению и может быть использовано в транспортировке и подъеме грузов, преимущественно длинномерных конструкций.
Известен способ транспортировки и подъема длинномерной конструкции, осуществляемый с помощью нескольких кранов с синхронизацией работы их механизмов подъема и грузозахватных органов.
По такому способу синхронизация работы подъемным механизмом сложна, так как необходимы дополнительные такелажные средства и нельзя использовать максимальную грузоподъемность кранов из-за необходимости наличия запаса грузоподъемности в случае нарушения синхронности работы механизмов подъема кранов, т. е. перегрузки одного из них.
Целью настоящего изобретения является обеспечение использования максимальной грузоподъемности кранов.
Поставленная цель достигается тем, что пере,распределение нагрузок на механизмы подъема осуЦ1ествляют путем автоматического регулирования скорости перемещения грузозахватных органов, ч . ; .
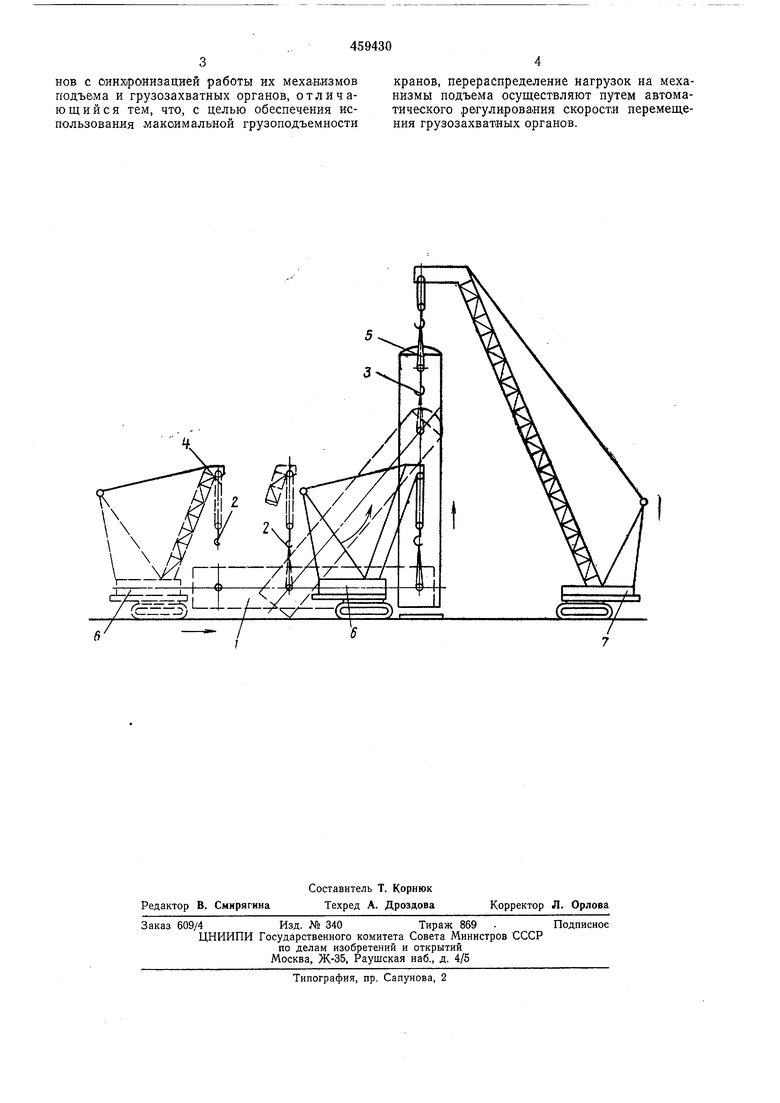
На чертеже показана схема транспортировки и подъема груза из горизонтального в вертикальное положение.
Груз, например длинномерную конструкцию 1, стропят грузозахватными органами 2, 3 механизмов подъема 4, 5, кранов 6, 7. Подъем и транспортировку груза 1 осуществляют с синхронизацией работы механизмов подъема 4, 5, при этом перераспределение нагрузок на механизмы подъема осуществляют путем автоматического регулирования скорости перемещения грузозахватных органов 2, 3. При одповременном перемещении кранов 6, 7 и работе механизмов подъема возможна перегрузка одного из кранов. С увеличением нагрузки на одном из механизмов подъема скорость подъема его уменьшается, а с уменьшением
скорость увеличивается. Передача изменения скорости одного из грузозахватных органов на механизм подъема другого грузозахватного органа может осуществляться любыми известными средствами. Краны, например, могут
быть оборудованы электромеханическими системами постоянной автоматической стабилизации нагрузок на механизмы подъема в зависимости от изменения скорости перемещения грузозахватных органов.
Предмет изобретения
Способ транспортировки и подъема груза,
преимущественно длинномерных конструкций,
30 осуществляемый с помощью нескольких кранов с синхронизацией работы их механизмов подъема и грузозахватных органов, отличающийся тем, что, с целью обеспечения использования максимальной грузоподъемности
кранов, перераспределение нагрузок на механизмы подъема осуществляют путем автоматического регулирования скорости перемещения грузозахватных органов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ перераспределения нагрузок на грузоподъемных механизмах | 1976 |
|
SU557994A1 |
| СПОСОБ ЗАЩИТЫ ГРУЗОПОДЪЕМНОГО КРАНА | 2004 |
|
RU2271985C2 |
| СИСТЕМА УПРАВЛЕНИЯ ГРУЗОПОДЪЕМНОГО КРАНА (ВАРИАНТЫ) | 2007 |
|
RU2347736C2 |
| СПОСОБ ЗАЩИТЫ СТРЕЛОВОГО ГРУЗОПОДЪЕМНОГО КРАНА ОТ ПЕРЕГРУЗКИ (ВАРИАНТЫ) | 2006 |
|
RU2322382C1 |
| СПОСОБ НАСТРОЙКИ ПРИБОРА БЕЗОПАСНОСТИ ГРУЗОПОДЪЕМНОГО КРАНА И РЕАЛИЗУЮЩИЙ ЕГО ПРИБОР БЕЗОПАСНОСТИ | 2005 |
|
RU2307061C1 |
| ОГРАНИЧИТЕЛЬ НАГРУЗКИ СТРЕЛОВОГО КРАНА | 2009 |
|
RU2391285C1 |
| СПОСОБ УПРАВЛЕНИЯ ГРУЗОПОДЪЕМНЫМ КРАНОМ | 2005 |
|
RU2305063C2 |
| СИСТЕМА ЗАЩИТЫ ГРУЗОПОДЪЕМНОГО КРАНА (ВАРИАНТЫ) | 2006 |
|
RU2335451C1 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ РАСКАЧИВАНИЯ ГРУЗА НА ГИБКОМ ПОДВЕСЕ (ВАРИАНТЫ) | 2009 |
|
RU2406679C2 |
| СПОСОБ НАСТРОЙКИ ПРИБОРА БЕЗОПАСНОСТИ ГРУЗОПОДЪЕМНОГО КРАНА | 2005 |
|
RU2290361C2 |
