Изобретение относится к подъемно-транспортному машиностроению и может быть использовано в системах управления и защиты грузоподъемных кранов от перегрузок и столкновений с различными препятствиями.
Известна система защиты грузоподъемного крана, содержащая электронный блок, включающий в себя цифровую вычислительную машину и подключенные к ней органы управления, индикаторы, блок памяти и устройство ввода-вывода информации, а также датчики рабочих параметров (угла подъема стрелы, длины стрелы, массы груза, угла поворота поворотной площадки крана и т.д.), подключенные к входам устройства ввода-вывода информации, выходы которого подключены к исполнительному блоку [1].
В этой системе отказ любого датчика или ошибка оператора при вводе в цифровую вычислительную машину параметров и режимов работы крана (положения выдвижных опор, степени запасовки грузового полиспаста, наличия, длины и угла наклона гуська и т.д.) приводят к неконтролируемому отключению защитных функций системы, что снижает безопасность работы крана.
Наиболее близкой к предложенной системе является система защиты крана от перегрузки и от столкновений с препятствиями, содержащая датчики параметров его работы, исполнительное устройство и информационно-управляющий блок, реализованный на основе микроконтроллера и соединенный с упомянутыми датчиками и исполнительным устройством. Этот блок содержит органы управления и выполнен с возможностью ввода в него оператором параметров стрелового оборудования и опорного контура крана. В системе осуществляются вычисления координат элементов и сборочных узлов крана относительно границ его рабочей зоны, нагрузок в них и запаса грузовой устойчивости крана, сравнение вычисленных значений с допустимыми значениями, записанными в памяти информационно-управляющего блока. В зависимости от результатов этих сравнений формируются сигналы управления исполнительным устройством, направленные на предотвращение превышения этих допустимых значений. Причем вычисления нагрузок и грузового момента осуществляются двумя методами с использованием двух групп датчиков нагрузки и/или пространственного положения стрелы крана [2].
В этой системе осуществляется последовательное сравнение различных параметров работы крана с их предельно допустимыми значениями без предварительного выбора параметра, превышение которого наиболее вероятно в текущий момент времени. Это приводит к снижению быстродействия срабатывания защиты и соответственно к снижению безопасности работы крана. Кроме того, в этой системе не предусмотрено выявление, предупреждение и исключение ошибок оператора при вводе в систему защиты параметров стрелового оборудования и/или опорного контура крана, что также приводит к снижению безопасности его работы. К этому же недостатку приводит и отсутствие коррекции величин предельно допустимых значений параметров работы крана в зависимости от погрешностей датчиков, используемых в этой системе.
Кроме того, пониженное быстродействие системы защиты приводит к повышенным перемещениям элементов конструкции крана (к выбегам) после достижения предельно допустимых значений параметров работы крана. Это, в свою очередь, затрудняет реализацию координатной защиты крана.
Повышенное количество датчиков в системе, обусловленное применением различных методов определения одного и того же параметра работы крана, приводит к снижению надежности системы защиты за счет ее усложнения.
Основной технической задачей, на решение которой направлено заявленное изобретение, является повышение безопасности работы грузоподъемного крана за счет:
- повышения быстродействия системы защиты;
- предупреждения или исключения ошибок оператора при вводе в систему параметров стрелового оборудования и/или опорного контура крана;
- исключения влияния на эффективность работы системы защиты погрешностей датчиков, осуществляющих прямые или косвенные измерения параметров работы крана.
Дополнительными техническими задачами являются:
- уменьшение перемещений крана после достижения предельно допустимых значений параметров работы крана и блокирования системой защиты его движений за счет повышения быстродействия системы защиты;
- повышение надежности системы защиты за счет реализации ее функций с меньшим количеством используемых датчиков без снижения безопасности работы крана;
- упрощение конструкции устройства ввода оператором параметров стрелового оборудования и опорного контура грузоподъемного крана;
- снижение требований к точности датчиков параметров работы крана без снижения безопасности его работы;
- повышение производительности работы крана за счет использования резервов его грузоподъемности при применении датчиков повышенной точности.
Поставленные технические задачи решаются тем, что в системе защиты грузоподъемного крана, содержащей датчики нагрузки и/или пространственного положения его элементов и/или сборочных узлов, исполнительное устройство и информационно-управляющий блок, выполненный на основе микроконтроллера с возможностью проводного и/или беспроводного подключения к нему упомянутых датчиков и исполнительного устройства и с возможностью вычислений координат элементов и/или сборочных узлов относительно границ рабочей зоны крана, и/или нагрузок в них, и/или запаса грузовой устойчивости крана, последующего сравнения, по меньшей мере, одного из вычисленных значений этих параметров с допустимыми значениями, записанными в памяти информационно-управляющего блока, и формирования, в зависимости от результатов этих сравнений, сигналов управления исполнительным устройством, направленных на блокирование движений грузоподъемного крана из условия предотвращения превышения этих допустимых значений и на разрешение остальных движений крана, информационно-управляющий блок дополнительно выполнен с возможностью выявления параметра, превышение допустимого значения которого наиболее вероятно для текущего пространственного положения и/или для текущих условий работы грузоподъемного крана, а также с возможностью приоритетных сравнений этого параметра с его допустимым значением.
Выявление параметра, превышение допустимого значения которого наиболее вероятно, осуществляется преимущественно с использованием математической модели крана, в частности, посредством определения наиболее нагруженного силового элемента или сборочного узла, или снижения запаса грузовой устойчивости грузоподъемного крана, или выявления элемента или сборочного узла крана, приближающегося к препятствию на наименьшее расстояние. При этом учитываются текущее пространственное положение, условия работы, конфигурация грузоподъемного оборудования, положение опор крана, текущее значения скорости подъема/опускания и/или перемещения груза, и/или климатические параметры внешней среды, в частности ее температура, скорость ветра и наличие осадков.
Во втором варианте системы защиты грузоподъемного крана, содержащей датчики нагрузки и/или пространственного положения его элементов и/или сборочных узлов, исполнительное устройство и информационно-управляющий блок, выполненный на основе микроконтроллера с возможностью проводного и/или беспроводного подключения к нему упомянутых датчиков и исполнительного устройства и с возможностью вычислений координат элементов и/или сборочных узлов относительно границ рабочей зоны крана, и/или нагрузок в них, и/или запаса грузовой устойчивости крана с учетом параметров стрелового оборудования и/или опорного контура грузоподъемного крана, сравнения, по меньшей мере, одного из вычисленных значений этих параметров с допустимыми значениями, записанными в памяти информационно-управляющего блока, и формирования, в зависимости от результатов этих сравнений, сигналов управления исполнительным устройством, направленных на предотвращение превышения этих допустимых значений, поставленные технические задачи решаются тем, что информационно-управляющий блок дополнительно выполнен с возможностью автоматического определения параметров стрелового оборудования и/или опорного контура грузоподъемного крана или предупреждения, и/или выявления, и/или исправления неправильных действий оператора при вводе этих параметров с возможностью последующего формирования предупреждающих информационных сигналов и/или сигналов управления исполнительным устройством, направленных на устранение последствий этих неправильных действий.
Для этого, в частности, информационно-управляющий блок выполнен с возможностью вывода на индикаторы информации о введенных параметрах стрелового оборудования и/или опорного контура и формирования сигналов управления исполнительным устройством, разрешающих работу крана, после подтверждения оператором правильности их ввода.
Решение поставленных задач в этом варианте системы может достигаться также тем, что информационно-управляющий блок выполнен с возможностью автоматического выявления неправильно введенных оператором параметров стрелового оборудования и/или опорного контура путем анализа характера изменения параметров работы крана, характеризующих нагрузку и/или пространственное положение его элементов и/или сборочных узлов. В частности, возможные варианты выявления неправильно введенной оператором кратности запасовки грузового полиспаста могут быть реализованы путем:
- сопоставления скорости перемещения крюковой обоймы или подъема/опускания груза и скорости перемещения грузового каната или угловой скорости барабана грузовой лебедки или путем сопоставления величин массы поднимаемого/перемещаемого груза, вычисленного на основании результатов измерения усилий в грузовом канате и усилия в стреловом канате или давлений в гидроцилиндре подъема стрелы;
- сопоставления измеренных значений массы поднимаемого/перемещаемого груза и выходной мощности привода грузовой лебедки, определяемой посредством измерения скорости перемещения грузового каната или угловой скорости барабана грузовой лебедки и момента, передаваемого валом грузовой лебедки, или величины давления в ее гидравлическом приводе, и последующего перемножения этих величин;
- контроля возможности работы крана с введенным значением этой кратности для данной длины стрелы, в частности с введенным оператором параметром-признаком наличия гуська.
В любом из указанных вариантов определения неправильно введенной оператором кратности запасовки грузового полиспаста информационно-управляющий блок может быть выполнен с возможностью автоматического исправления неправильно введенной кратности запасовки грузового полиспаста. В частности, при введении оператором параметра-признака наличия гуська автоматически устанавливается единичное значение кратности запасовки грузового полиспаста.
Информационно-управляющий блок может быть выполнен также с возможностью автоматического выявления неправильно введенного оператором параметра-признака наличия гуська (удлинителя стрелы), например, путем сопоставления:
- изменения угла наклона или длины стрелы и соответствующего ему изменения грузового момента крана;
- вычисленного значения грузового момента и момента инерции поворотной платформы крана с грузом, определяемого с использованием результатов измерения ускорений и/или усилий или моментов в приводе поворота крана.
Решение поставленных задач может достигаться также выполнением информационно-управляющего блока с возможностью автоматического выявления неправильно введенных оператором параметров опорного контура и/или стрелового оборудования (в части длины стрелы/вылета, например, установки гуська), в частности путем выявления несоответствий значений грузового момента, вычисленных с использованием результатов измерений усилий или давлений в механизмах выносных опор и в механизме поддержания стрелы.
В третьем варианте системы защиты грузоподъемного крана, содержащей датчики нагрузки и/или пространственного положения его элементов и/или сборочных узлов, исполнительное устройство и информационно-управляющий блок, выполненный на основе микроконтроллера с возможностью проводного и/или беспроводного подключения к нему упомянутых датчиков и исполнительного устройства и с возможностью вычислений координат элементов и/или сборочных узлов относительно границ рабочей зоны крана, и/или нагрузок в них, и/или запаса грузовой устойчивости крана, сравнения, по меньшей мере, одного из вычисленных значений этих параметров с допустимыми значениями, записанными в памяти информационно-управляющего блока, и формирования, в зависимости от результатов этих сравнений, сигналов управления исполнительным устройством, направленных на предотвращение превышения этих допустимых значений, решение поставленных задач достигается тем, что информационно-управляющий блок дополнительно выполнен с возможностью изменения допустимых значений параметров в зависимости от погрешности упомянутых датчиков. В частности, осуществляется автоматическое снижение допустимых значений нагрузки и/или увеличение допустимого значения грузовой устойчивости крана при увеличении погрешности датчиков нагрузки и/или пространственного положения элементов и/или сборочных узлов грузоподъемного крана. При этом могут использоваться априорно установленные и записанные в памяти информационно-управляющего блока значения максимальной погрешности датчиков при различных значениях температуры окружающей среды.
В любом варианте предложенной системы защиты для решения поставленных задач, по меньшей мере, часть датчиков нагрузки и/или пространственного положения может быть объединена в одну группу по месту их расположения на грузоподъемном кране и снабжена контроллером, выполненным с возможностью преобразования и/или обработки выходных сигналов этих датчиков и их проводной или беспроводной передачи в информационно-управляющий блок. Этот блок может дополнительно содержать встроенное устройство индикации/сигнализации, и/или регистратор параметров, и/или запоминающее устройство, а также может быть выполнен с возможностью подключения к нему, по меньшей мере, одного из этих устройств.
Кроме того, в любом варианте предложенной системы защиты информационно-управляющий блок может быть выполнен с возможность выявления и запоминания предыстории приближения параметра к его допустимому значению и формирования сигналов управления исполнительным устройством, направленных на блокирование или разрешение различных движений крана, с учетом этой предыстории.
Реализация системы защиты с указанными отличительными признаками независимых пунктов формулы изобретения позволяет:
- выявить параметр работы крана, превышение допустимого значения которого наиболее вероятно в текущий момент времени, с последующим приоритетным ограничением величины этого параметра (с этой целью предварительно определяется наиболее нагруженный силовой элемент или сборочный узел крана или выявляется снижение запаса его грузовой устойчивости);
- реализовать предупреждение, выявление и/или исправление неправильных действий оператора при вводе параметров стрелового оборудования и/или опорного контура грузоподъемного крана;
- скорректировать величины допустимых значений параметров работы крана в зависимости от погрешности датчиков, осуществляющих прямые или косвенные измерения этих параметров.
Благодаря этому обеспечивается повышение безопасности работы грузоподъемного крана, уменьшение величин его перемещений после достижения предельно допустимого значения какого-либо параметра и блокирования движений крана системой защиты, повышение надежности системы защиты и снижение требований к точности датчиков либо повышение производительности работы крана за счет использования резервов его грузоподъемности при применении датчиков повышенной точности. Поэтому эти отличительные признаки находятся в прямой причинно-следственной связи с решением как основной, так и дополнительной технических задач.
На чертеже в качестве примера приведена одна из возможных функциональных схем системы защиты грузоподъемного крана.
Система, которая может именоваться также устройством или прибором защиты или безопасности, содержит информационно-управляющий блок 1, выполненный на основе микроконтроллера 2, и подключенные к этому блоку при помощи проводного или беспроводного интерфейса датчики 3 нагрузки и/или пространственного положения элементов и/или сборочных узлов крана и исполнительное устройство 4.
В состав информационно-управляющего блока 1, который может именоваться также блоком обработки данных, блоком индикации, контроллером и т.п., могут входить органы управления системой защиты 5, устройство индикации 6, блок памяти/регистратор параметров 7, устройство звуковой сигнализации 8, устройство ввода/вывода информации 9 и, при необходимости, другие устройства, например часы реального времени, подключенные непосредственно к микроконтроллеру 2 или к устройству ввода/вывода информации 9. Часть указанных устройств может не входить в информационно-управляющий блок 1. Эти устройства могут подключаться к устройству ввода/вывода информации 9 как внешние устройства информационно-управляющего блока 1.
Устройство ввода-вывода информации 9 обеспечивает согласование логических уровней входных и выходных сигналов микроконтроллера 2 с другими функциональными устройствами системы и выполнено на базе интерфейсных микросхем. Передача данных в системе, в зависимости от варианта исполнения устройства ввода-вывода информации 9 и интерфейсных схем подключенных к нему устройств, осуществляется по радиальной схеме при помощи отдельных проводов, по мультиплексному каналу обмена данными (CAN, LIN, RS-485 и т.д.) и/или по радиоканалу (Wi-Fi, Bluetooth, ZigBee, GSM, CDMA и т.д.). В последнем случае во всех подключаемых устройствах, включая датчики 3, устанавливаются приемопередатчики с соответствующими антеннами.
Выходное устройство 4, которое может именоваться также исполнительным устройством, выходным или силовым блоком, блоком расширения, выходным контроллером и т.п., может быть выполнено в виде набора силовых электромагнитных реле или силовых электронных ключей, подключенных к электрогидравлическим или электромагнитным исполнительным устройствам приводов грузоподъемного крана машины. При необходимости оно может содержать микроконтроллер и какую-либо интерфейсную схему для проводной или беспроводной связи с информационно-управляющим блоком 1.
Набор датчиков 3 зависит от варианта реализации предложенной системы защиты и от типа грузоподъемного крана - мостовой или стреловой кран, кран с телескопической или решетчатой стрелой, с гидравлическим или канатным приводом механизма подъема стрелы и т.д. Датчики 3 в общем случае включают в себя датчик угла подъема (наклона) стрелы, датчик длины стрелы, датчик массы груза (датчик силы или датчики давления), датчик угла поворота поворотной площадки грузоподъемного крана (датчик азимута), датчик предельного подъема грузозахватного органа, датчик приближения к линии электропередачи, датчики положений органов ручного управления исполнительными механизмами, датчики положений выносных опор, датчики давлений в гидроцилиндрах опор, датчик угловой скорости привода грузовой лебедки и другие датчики. В состав датчиков 3 могут также входить датчики параметров внешней среды - температуры окружающего воздуха, скорости ветра, наличия осадков, тумана и т.д.
Датчики 3 могут быть объединена в группы по месту их расположения на грузоподъемном кране, например на оголовке телескопируемой стрелы, на ее корневой секции, на неповоротной части крана и т.д. В этом случае каждая группа снабжается контроллером, реализованным на микроконтроллере и осуществляющим преобразование по уровню, усиление, нормирование и/или обработку выходных сигналов этих датчиков - фильтрацию, термокомпенсацию, лианеризацию и т.д. перед их передачей в информационно-управляющий блок 1.
Органы управления 5 выполнены в виде набора кнопок/клавиш, переключателей, сенсорного экрана дисплея - устройства индикации 6 и т.п. При необходимости, используется дополнительный контроллер органов индикации (например, контроллер клавиатуры).
Устройство индикации 6 может быть размещено как в информационно-управляющем блоке 1, так и вне его. Оно может содержать как символьный, так и графический, например жидкокристаллический TFT, индикатор (дисплей) и/или светодиодные индикаторы. Устройство звуковой сигнализации 8 может также иметь различные варианты размещения на грузоподъемном кране и содержит акустический преобразователь (излучатель звука) с усилителем мощности (при необходимости, с синтезатором звуковых сигналов).
Система защиты может дополнительно содержать блок памяти (регистратор параметров) 7 грузоподъемного крана, встроенный в информационно-управляющий блок 1 и/или съемный (внешний). Он выполняется преимущественно в виде блока энергонезависимой Flash памяти, подключенного к микроконтроллеру 2 и/или к устройству ввода-вывода информации 9 (на чертеже условно показан первый вариант). Этот блок может дополнительно содержать часы реального времени.
Система безопасности работает следующим образом.
Перед началом работы грузоподъемного крана в память микроконтроллера 2 или в блок памяти 7 предварительно (до начала работы крана) в виде формул - подпрограмм микроконтроллера, разработанных с использованием математической модели крана, или в виде таблиц записываются допустимые величины нагрузок для каждого основного силового элемента или сборочного узла грузоподъемного крана (например, допустимые величины массы поднимаемого груза, усилия в механизме телескопирования, усилия в механизме поворота и т.д.) и максимально возможные перемещения элементов и сборочных узлов крана (например, его стрелы) после срабатывания ограничений по координатной защите (по защите от столкновений с различными препятствиями) для различных пространственных положений его элементов и сборочных единиц (стрелы, грузозахватного органа и т.д.), а также значения максимально допустимого грузового момента крана в различных режимах его работы (с полным или неполным опорным контуром, с различным стреловым оборудованием и т.д.).
Максимально допустимые величины нагрузок, грузового момента и перемещений, в общем случае, записываются для различных значений параметров внешней среды (температуры окружающего воздуха, скорости ветра и т.д.) в виде функций этих параметров или в виде таблиц.
Эти величины могут быть также записаны для различных значений погрешностей измерения параметров работы грузоподъемного крана в виде таблиц или функций (подпрограмм), позволяющих осуществить коррекцию этих допустимых величин в зависимости от априорно известных величин погрешностей датчиков 3, в частности их паспортных метрологических характеристик. В этом случае максимально допустимые величины нагрузок и грузового момента уменьшаются по мере увеличения погрешностей измерения и соответственно вычисления их фактических значений. При этом уровни срабатывания системы защиты по этим параметрам не превышают фактических максимально допустимых значений этих параметров, измеренных/вычисленных с погрешностями, определяемыми фактической точностью датчиков 3. Аналогичным образом, максимально возможные величины перемещений элементов и сборочных узлов крана (например, его стрелы) после срабатывания ограничений по координатной защите (величины «выбега» после срабатывания защиты) увеличиваются по мере увеличения погрешностей измерения их пространственного положения из условия, что эти величины гарантируют своевременную остановку крана - его защиту от столкновений с препятствиями. При этом, в частности, учитывается, что эта точность зависит от температуры окружающей среды, величины напряжения питания системы безопасности и/или от значений каких-либо других параметров, измеряемых датчиками 3.
В зависимости от вариантов реализации предложенной системы защиты в памяти микроконтроллера 2 или в блоке памяти 7 предварительно могут быть записаны данные о тех элементах и сборочных узлах грузоподъемного крана, перегрузка которых наиболее вероятна для текущего пространственного положения и/или для текущих условий работы грузоподъемного крана, а также данные о наиболее опасном в этих условиях параметре работы крана - силовой нагруженности какого-либо элемента или сборочного узла крана, его грузовой устойчивости или расстояния до препятствия. Эти данные могут быть получены путем экспертных оценок, расчетным путем при проектировании системы защиты, путем анализа статистических данных о предыдущих авариях грузоподъемных кранов или получены в результате экспериментальных исследований. В памяти микроконтроллера 2 или в блоке памяти 7 они записываются в виде таблиц и/или формул - подпрограмм работы микроконтроллера 2. Аналогичным образом записываются данные, позволяющие осуществить расчет величин нагруженности каждого силового элемента и сборочного узла крана, запаса грузовой устойчивости крана и расстояний до препятствий. Эти данные определяются при проектировании крана или системы его защиты преимущественно расчетным путем с использованием математической модели крана.
Перед началом работы грузоподъемного крана крановщик при помощи органов управления 5 осуществляет установку параметров грузоподъемного крана, характеризующих его геометрию, условия и режим работы. Количество и вид этих параметров определяются конструкцией конкретного грузоподъемного крана и требованиями к его безопасной эксплуатации. К ним относятся вид используемого стрелового оборудования (наличие, длина и угол наклона гуська), характеристики опорного контура, ограничения по координатной защите и т.д.
Микроконтроллер 2 работает по программе, записанной в его встроенной памяти программ или в блоке памяти 7, и через устройство ввода/вывода информации 9 осуществляет обмен информацией с датчиками рабочих параметров крана 3 по общей мультиплексной линии связи, и/или по отдельным проводам, и/или по радиоканалу. После получения информации от датчиков 3 микроконтроллер 2 определяет действительные значения рабочих параметров - текущую нагрузку крана, запас его грузовой устойчивости и фактическое положение его элементов и сборочных узлов, в частности грузоподъемного (стрелового) оборудования. При необходимости, для определения текущих значений этих параметров, осуществляются необходимые преобразования выходных сигналов датчиков 3. Это имеет место в случае, когда текущая нагрузка крана и/или положение его элементов и сборочных узлов измеряются косвенным образом, например при определении нагрузки стрелового гидравлического крана по давлениям в штоковой и поршневой полостях гидроцилиндра подъема стрелы. Алгоритмы этих преобразований общеизвестны и реализуются программно микроконтроллером 2.
Далее микроконтроллер 2, работая по программе, выявляет параметр, превышение допустимого значения которого наиболее вероятно для текущего пространственного положения и/или для текущих условий работы грузоподъемного крана. Если, например, осуществляется опускание груза стрелой, то наиболее вероятным является снижение грузовой устойчивости крана до предельно допустимой величины, а если, например, происходит поворот крана с небольшим грузом влево, то наибольшую опасность для крана представляет его столкновение с препятствием, находящимся слева. После этого микроконтроллер 2 в приоритетном порядке осуществляет сравнение величины именно этого параметра с его допустимым значением (в приведенных примерах - запаса грузовой устойчивости (грузового момента) и расстояния до препятствия слева), после чего формирует сигналы управления выходным устройством 4, направленные на ограничение этого параметра. Прочие параметры работы крана сравниваются с их допустимыми значениями после окончания всех действий с выявленным параметром, наиболее значимым для безопасной работы крана.
Благодаря этому обеспечивается повышение быстродействия реализации системой ее защитных функций и соответственно повышается безопасность работы крана и уменьшаются перемещения элементов и сборочных узлов крана после достижения их предельных положений по координатной защите.
Дополнительно микроконтроллер 2 реализует предупреждение, выявление и, по мере возможности, исправление неправильных действий оператора при вводе параметров стрелового оборудования и/или опорного контура грузоподъемного крана.
Для этого, в простейшем случае, значения параметров, набранные оператором при помощи органов управления 5, отображаются при помощи устройства индикации 6 и далее используются в работе системы защиты только после их визуальной проверки оператором и подтверждения правильности их ввода при помощи одного из органов управления 5.
В системе возможно также автоматическое выявление неправильно введенных оператором параметров стрелового оборудования и/или опорного контура. Для этого микроконтроллер 2 проводит анализ характера изменения параметров работы крана, характеризующих нагрузку и/или пространственное положение его элементов и/или сборочных узлов. В частности, выявляет ошибки оператора при вводе кратности запасовки грузового полиспаста.
Определение микроконтроллером 2 реальных значений этой кратности может базироваться на сравнении скорости перемещения крюковой обоймы (подъема/опускания груза) и скорости перемещения грузового каната или угловой скорости барабана грузовой лебедки, или на сравнении значений массы поднимаемого/перемещаемого груза, вычисленных на основании результатов измерения усилий в грузовом канате и усилия в стреловом канате или давлений в гидроцилиндре подъема стрелы, либо на сравнении измеренных значений массы поднимаемого/перемещаемого груза и выходной мощности привода грузовой лебедки. Мощность привода в последнем случае определяется посредством измерения скорости перемещения грузового каната или угловой скорости барабана грузовой лебедки и момента, передаваемого валом привода грузовой лебедки (величины давления в ее гидравлическом приводе), и последующего перемножения этих величин. В этих случаях микроконтроллер 2 с использованием заранее внесенных в его памяти функциональных зависимостей вычисляет фактическую кратность запасовки грузового полиспаста, сравнивает ее с величиной, введенной оператором, и далее либо блокирует работу грузоподъемного крана с выдачей предупреждающего сообщения оператору при помощи устройства индикации 6 и устройства звуковой сигнализации 8, либо автоматически исправляет ошибку оператора.
В простейшем случае контроль правильности ввода кратности запасовки грузового полиспаста может осуществляться микроконтроллером 2 путем выявления невозможности работы крана с введенным значением этой кратности для данной длины стрелы. Например, введение оператором повышенного значения кратности запасовки полиспаста при работе крана с гуськом является заведомо ошибочным. Такая ошибка исправляется микроконтроллером 2 путем автоматической установки единичного значения кратности запасовки грузового полиспаста при введении оператором параметра-признака наличия гуська.
Аналогичный подход используется и при выявлении неправильно введенного оператором параметра-признака наличия гуська (удлинителя стрелы). Для этого микроконтроллер 2 сопоставляет изменения угла наклона или длины стрелы и соответствующее ему изменение грузового момента крана.
Выявление этой ошибки возможно также путем сопоставление вычисленного значения грузового момента и момента инерции поворотной платформы крана с грузом, который определяется расчетным путем после измерения ускорений, усилий или моментов в приводе поворота крана. Указанные сопоставления реализует подпрограмма работы микроконтроллера 2, разработанная с использованием математической модели крана.
Возможно также автоматическое выявление и, при необходимости, исправление ошибок оператора при вводе параметров опорного контура. Для этого, например, микроконтроллер 2 выявляет несоответствия значений грузового момента, вычисленных с использованием результатов измерений усилий или давлений в механизмах выносных опор и в механизме поддержания стрелы.
В случае реализации автоматического определения и автоматической установки отдельных параметров стрелового оборудования и/или опорного контура крана возможно исключение ввода этих параметров оператором. Это приводит к упрощению органов управления 5.
С целью дальнейшего повышения безопасности работы крана в информационно-управляющем блоке 1 (в микроконтроллере 2) может быть реализовано изменение допустимых значений параметров в зависимости от погрешностей используемых датчиков. Для этого микроконтроллер 2 осуществляет, например, автоматическое снижение допустимых значений нагрузки и/или увеличение допустимого значения грузовой устойчивости крана при увеличении погрешности датчиков 3. Алгоритмы этого снижения записаны в памяти микроконтроллера 2 или в блоке памяти 7. Наиболее распространенной причиной изменения погрешности датчиков является изменение температуры окружающей среды, контролируемое одним из датчиков 3.
В любом варианте предложенной системы защиты формирование сигналов управления выходным устройством 4, в плане разрешения различных движений крана после срабатывания ограничений его движений, возможно с учетом предыстории приближения какого-либо параметра к его допустимому значению. Для этого микроконтроллер 2, после выявления элемента или сборочного узла крана, перемещение которого привело к формированию сигналов управления выходным устройством 2, блокирующих эти перемещения, и анализа предыстории возникновения этого блокирования по соответствующей подпрограмме своей работы определяет разрешенные движения крана. Например, если произошла остановка подъема груза по перегрузке по причине приближения нагрузки на стрелу к предельно допустимому значению, а запас грузовой устойчивости крана остается достаточно большим, то система защиты разрешает опускание стрелы крана. Если же перегрузка произошла по причине превышения допустимого значения грузового момента, то система защиты, формируя соответствующие сигналы управления выходным устройством 2, разрешает подъем стрелы при сохранении запрета ее опускания.
Для документирования работы грузоподъемного крана система может содержать встроенный или внешний регистратор параметров, реализованный на основе блока памяти 7, в который микроконтроллер 2 записывает значения основных рабочих параметров крана (значение грузового момента, угол наклона и длина стрелы и т.п.), предупреждающих сигналов и сигналов управления краном с целью их последующего считывания для анализа эффективности работы крана и для расследования причин возможных отказов и аварий.
В данном описании схематично приведены лишь частные варианты реализации предложенной системы защиты грузоподъемного крана. Изобретение охватывает ее другие возможные варианты исполнения и их эквиваленты без отступления от сущности изобретения, изложенной в его формуле.
Источники информации
1. US 5730305 A, МПК6 B66C 13/16, 13/18, 24.03.1998.
2. RU 2282577 C2, МПК7 B66C 23/88, 15/00, 27.08.2006.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ЗАЩИТЫ СТРЕЛОВОГО ГРУЗОПОДЪЕМНОГО КРАНА ОТ ПЕРЕГРУЗКИ (ВАРИАНТЫ) | 2006 |
|
RU2322382C1 |
| СПОСОБ НАСТРОЙКИ ПРИБОРА БЕЗОПАСНОСТИ ГРУЗОПОДЪЕМНОГО КРАНА И РЕАЛИЗУЮЩИЙ ЕГО ПРИБОР БЕЗОПАСНОСТИ | 2005 |
|
RU2307061C1 |
| СИСТЕМА ЗАЩИТЫ ГРУЗОПОДЪЕМНОЙ МАШИНЫ | 2006 |
|
RU2343103C2 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ РАСКАЧИВАНИЯ ГРУЗА НА ГИБКОМ ПОДВЕСЕ (ВАРИАНТЫ) | 2009 |
|
RU2406679C2 |
| СИСТЕМА ЗАЩИТЫ ГРУЗОПОДЪЕМНОГО КРАНА | 2002 |
|
RU2237006C2 |
| СПОСОБ ПОВЫШЕНИЯ БЕЗОПАСНОСТИ РАБОТЫ ГРУЗОПОДЪЕМНОГО КРАНА | 2004 |
|
RU2270162C2 |
| СПОСОБ ЗАЩИТЫ И РЕГИСТРАЦИИ ПАРАМЕТРОВ РАБОТЫ ГРУЗОПОДЪЕМНОЙ МАШИНЫ | 2010 |
|
RU2442742C1 |
| ЭЛЕКТРОННАЯ СИСТЕМА ГРУЗОПОДЪЕМНОЙ МАШИНЫ | 2009 |
|
RU2405736C1 |
| СПОСОБ НАСТРОЙКИ ПРИБОРА БЕЗОПАСНОСТИ ГРУЗОПОДЪЕМНОГО КРАНА | 2005 |
|
RU2290361C2 |
| СПОСОБ ЗАЩИТЫ ГРУЗОПОДЪЕМНОГО МЕХАНИЗМА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2267457C2 |
Группа изобретений относится к машиностроению и может быть использована в приборах и системах защиты грузоподъемных кранов. Система защиты крана содержит датчики параметров его работы, исполнительное устройство и информационно-управляющий блок, выполненный на основе микроконтроллера с возможностью проводного и/или беспроводного подключения к нему упомянутых датчиков и исполнительного устройства и с возможностью формирования сигналов управления исполнительным устройством, направленных на предотвращение превышения параметров работы крана их допустимых значений. В системе выявляется параметр, превышение допустимого значения которого наиболее вероятно в текущий момент времени, после чего осуществляется приоритетное ограничение величины этого параметра. Для этого определяется наиболее нагруженный силовой элемент крана или выявляется снижение запаса его грузовой устойчивости. Во втором варианте системы защиты реализуется предупреждение, выявление и/или исправление неправильных действий оператора при вводе параметров стрелового оборудования и/или опорного контура. В третьем варианте системы предусматривается изменение допустимых значений параметров работы крана в зависимости от погрешности используемых датчиков. Группа изобретений позволяет повысить безопасность работы грузоподъемного крана, уменьшить величины его перемещений после достижения предельно допустимого значения какого-либо параметра и блокирования движений крана системой защиты, повысить надежность этой системы и снизить требования к точности датчиков. 3 н. и 22 з.п. ф-лы, 1 ил.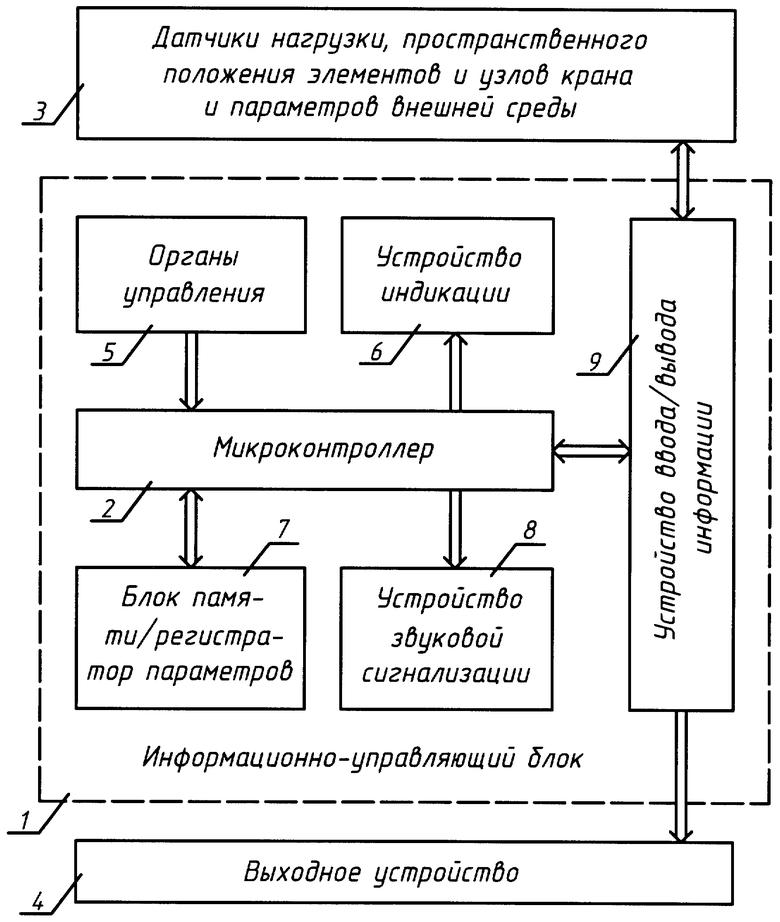
17 Система защиты по п.9, отличающаяся тем, что информационно-управляющий блок выполнен с возможностью автоматического выявления неправильно введенного оператором параметра-признака наличия гуська.
| RU 2005108905 А, 20.07.2005 | |||
| СПОСОБ ЗАЩИТЫ ГРУЗОПОДЪЕМНОГО КРАНА | 2004 |
|
RU2271985C2 |
| Приспособление к микрофотографическому аппарату для получения стереоскопических снимков | 1935 |
|
SU49811A1 |
| СПОСОБ МОМЕНТНОЙ ЗАЩИТЫ КРАНА С ТЕЛЕСКОПИЧЕСКОЙ СТРЕЛОЙ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2003 |
|
RU2245293C2 |
| СПОСОБ ОБМЕНА ИНФОРМАЦИЕЙ МЕЖДУ МОДУЛЯМИ СИСТЕМЫ БЕЗОПАСНОСТИ ГРУЗОПОДЪЕМНОГО КРАНА И СИСТЕМА БЕЗОПАСНОСТИ ГРУЗОПОДЪЕМНОГО КРАНА | 2002 |
|
RU2251524C2 |
| US 5730305 A, 24.03.1998. | |||

