(54) ИМПУЛЬСНО-ФЛЗОВАЯ СИСТЕМА ТОЧНОГО ПОЗИЦ ЮНИГ ОВАНИЯ
| название | год | авторы | номер документа |
|---|---|---|---|
| Фазовая следящая система с комбинированным управлением | 1978 |
|
SU746423A1 |
| ЦИФРОВАЯ СИСТЕМА УПРАВЛЕНИЯ СКОРОСТЯМИ | 1972 |
|
SU341898A1 |
| Устройство компенсации сдвигачАСТОТ | 1979 |
|
SU843270A1 |
| Устройство для программного управления электроприводом | 1980 |
|
SU1198458A1 |
| Устройство для программного управления | 1980 |
|
SU903811A1 |
| Устройство компенсации сдвига частот | 1985 |
|
SU1316097A2 |
| Устройство для регистрации веса в динамике | 1983 |
|
SU1153239A1 |
| Устройство для управления позиционированием в ноль исполнительных органов станка | 1988 |
|
SU1571549A1 |
| Устройство для измерения девиации частоты линейно частотно-модулированного колебания | 1983 |
|
SU1190281A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДАМИ ПОДАЧ ДВУХ ИСПОЛНИТЕЛЬНЫХ ОРГАНОВ РАВНОЗНАЧНЫХ ВЕДУЩИХ КООРДИНАТ ЗУБОДОЛБЕЖНОГО СТАНКА | 1991 |
|
RU2025257C1 |
Изобретение относится к области автоматизации приводов станков и других механизмов с nporpa.NrMHfaiM управлением и предназначено для использоваш1я в цифровых системах прог раммного правления.
Известны устройства импульсно-фазового типа, обеспечивающие режим контурной обработки и точного позиционирования, содержашие последовательно включенные управляющее устройство, cxBNry сложения-вычитания основной делитель частоты, трг.ч-ер-дискриминатор, коммутатор, блок компепсапии скоростного jJiu.-corjiacoBaHuM, элемент сравнения, привод подачи, рабочий орган и датчик обратной связи.
Эти устройства, позволяющие осуществить как режим контурной обработки, так и режим точного позипионирования, пе учитывают в режиме точногю позиционирования девиации фазы датчика, что существенно снижает точность позипионирования и приводит к ошибкам, превышающим допуски на выход рабоче1о органа в заданную позицию, особенно на станках и других устройствах повышен1гых классов точности.
Предлагаемая система отличается от известных тем, что для устранения влияния девиации фазы датчика путем статистического усреднения результатов измерения, получаемых с датчика, в нее введены первая схема Запрет и последовательно соединенные схема И, второй делитель частоты, элемент задержки, третий делитель частоты и в1Х)рая схема Запрет, выход которой подклкзчен к приводу подач, а два входа первой схемы Запрет подключены к прому.жуточным выходам первохо делителя.один из входов схемы И подключен к выходу управляющего устройства, а второйк фазовому каналу датчика.
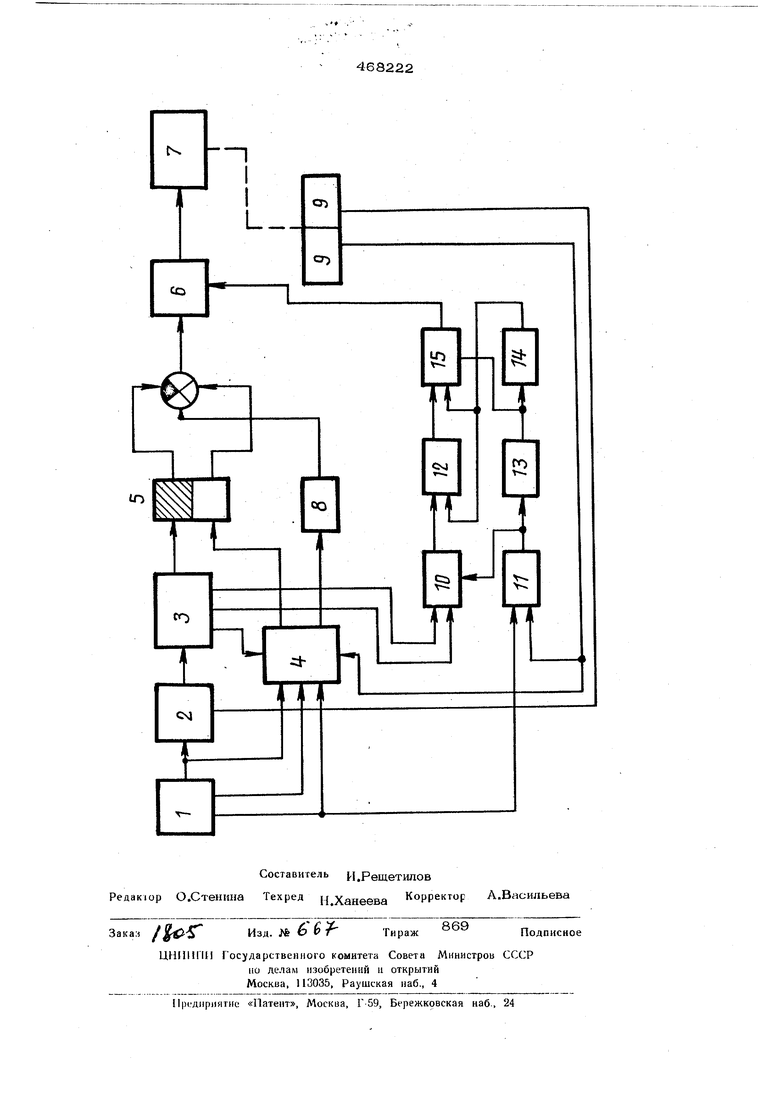
На чертеже показана функпислнальная с.хема предлагаемого устройства.
Схема содержит управляюи.1ее уст|лжст- во 1, схему 2 сложения и вычитания, nejvвый (основной) делитель частоты 3, комNfjTaTop 4, триггер-дискриминатор 5, привод подачи 6, рабочий орган 7, блок 8 компенсации скоростного рассо1-ласоваиия, фазовый и частотный каналы датчика 9, первую схему Запрет 10, схему И 11, I 3. -. третий делитель 12. второй делитель 13; элемент задержки 14 и вторую схему Запоет 15 Устройство работает следующим образом. , I В режиме контурной обработки систем функшюшфует как, -обычная импульсно«4з ; зовая система, т. к. одитГ15 входо втригг е ра-дискриминатора 5 подключен к выходу первого делителя 3, а второй через комN raTOp 4 к выходу фазового датчика 9. Блок компенсации скоростного рассогласова. ння 8 выдает в- cxeKiy сравнения- сигнал компенсации скоростцогр rpa |p ji&COBaHHH. Сигнал управления. i5S,:.flKjP4.UScT TiaeT всхе1 . ..-;.---.- -i- -. . - му средне,ш,5;;:т еР - да Р« натора непрерывно,:Э т Иэнты- в этом режи ме влияния на рйботу системы не оказыва При точном позиционировании, признак которого вводится в управляющее устройст- , f во 1 с пеофоленты, подход к точке позиди- онирования с одной стороны, разгон до ско- рости перехода и замедление до скорости приемистости привода организуется при программнровании или автоматически управляю ., ... „ щим устройством так. чтобы за 1, мм до точки позиционироза1-шл зад-.адпенйэ закoш илocь., .-, За J, 2-1,3 мм до точки поаициониро, ваиия vnr/авляющее устройство л вьздает cHrHaji на снятие компенсации скоростного л т-т рассогласоваттея в комг гутатор 4. По этому сигналу прекращается прохождение комакц ных имп льсов пути через коым татор 4 в блок компенсации скоростного рассогласо вания В. Сигнал компенсации на выход 8 снимае-тся. и привод отстает по пути на дискрет. С этим отставанием ..:; движение продолжается до тех пор, пока управляющее устройство 3. не выдает всю информацию о дашюм отрезке перемещения. С командным нм ульсом яути управ. ус-гройство пыдает а коммута тор 4 - схег.-:у И 11 команду конец отра. ботки клдра (K.OKj, По этой комагще схема И 11 открываео ся начинает пропускать сигнал фазового канала датчика на входы первой схемы Запрет Ю м второго делителя 13, а . мутатор 4 разрьюает связь , по пути за 0,05-.0,1 мм до точки позияионирования, т. е. переводит привод в релшм регулирования скорости, причем вместо датчика ко второму входу триггера-дискриминатора 5 подключается промежуточный выход первого делителя такой, чтобы обеспечить скорость 46 ,.8222 ,.. . .. перемещения, рабочего органа, исключающую перебег при останове, выходящий: за допу точности позиционирования. Первая схема Запрет открывается -- 2 g импульсом первого делителя 3, а закрьша м ется - + 1 импульсом того же делите, „я Гтаким образом, через схему Запрет 10 ,,, фазового канала датчика пройдут lej;, третьего делителя 12 только в том случае, если они попадут вворота между tki ...-к- и, -..+. ,;1-и|,1пульсами первого де| - ЛИТбЛЯ о . gj объем третьего- ЙЙЩ ая 12 равен О,5 ,6 делит 1Й 1. Импульс-пере;-„ ения третьего на -вход второй схемы Запрет Щ§«.н вьгходе которой формируется сигнал .ёШ фивод. 90- - - sr--- ti---- -.- .v , посттоающий в привод. Импульс переполнеi., .г, НИН второго делителя 13 гасит вторую схе. -. ему ЗапретГ 15 и запускает элемент задерж-,-;, ки 14. Импульсы с выхода элемента задерж--, ки 14 сбрасывают на нуль третий делитель эд -,,, , 12 и открывают вторую схему Запрет 15, , , 1аким образом, чтобы на выходе второй „„.. схемы Запрет появился сигнал стоп при- „ -вод, необходимо, чтобы за время заполнеiния второго делителя 13 объемом т1 на ЯО-« iвход третьего делителя 12 через первую .,„«,- дхему Запрет 1О прошло «1 импульсов, - Объем второго делителя выбирается из 35 ловия ft , где f m - частота фа- . . .зового, (измерительного) сигнала датчика, . °™™ Девиации этого сигнала. ,40 редмет изобретения : Импульсно-фазован система точного пози- . v цконирОБа,ния, содержащая последовательно 45 сое.циненные управляющее устройство, схе-г,, му сложения и вычитаниЯ; первый делительчастоты, триггер-дискриминатор, элемент :сравнения, привод подачи, рабочий орган, фа.зовый канал датчика обратной связи, ча50 стотный канал которого подключен к схеме сложения и вычитания, коммутатор и блок .компенсации скоростного рассогласования, i подключенный к элементу сравнения, при- чем входы коммутатора соединены с выхо,55 дами управляющего устройства и первого делителя частоты, а один из выходов коммутатора - с другим входом триггера-дискриминатора, отличающаяся тем, что, с целью повышения точности работы системы, в нее введены первая схема Запрет и последовательно соединенные схема И, второй делитель частоты, элемент задержки, третий делитель частоты и вторая схема Запрет, подключенная кприводу подач, причем схема И, соединенная с управляющим устройством и фазовым каналом датчика обратной связи, через первую .схему Запрет подключенную к первому делителю частоты, связана с третьим делителем частрчы, а выходы второго делителя частоты и элемента задержки подключены кр входам второй схемы Запрет
