Изобретение относится к области станкостроения и может быть использовано для управления двумя равнозначными приводами подач - ведущих координат зубообрабатывающих станков с программным управлением, например зубодолбежных, для одновременной обработки двух зубчатых колес одним долбяком на двух делительных столах.
Известно устройство управления приводами двух функционально связанных координат, в котором привод ведомой координаты синхронно с автоподнастройкой обрабатывает движение ведущей координаты [1].
Однако данное устройство невозможно использовать для управления двумя равнозначными ведущими координатами, так как между ними отсутствует по условиям функционирования подчиненность координат.
Известно устройство управления приводами подач двух равнозначных ведущих координат (продольных столов) зубодолбежного станка с программным управлением [2]. В этом устройстве происходит формирование одинаковых по величине сигналов управления обеими координатами и одновременное сообщение их электродвигателем этих координат.
Устройство содержит задатчик, соединенный через первый и второй усилители мощности соответственно с первым и вторым регулируемыми электродвигателями, кинематически связанными посредством редукторов с исполнительными органами первой и второй ведущих координат. На исполнительных органах обеих равнозначных координат установлены соответственно первый и второй импульсные измерительные преобразователи.
В процессе функционирования механической системы скорость движения по любой из координат девиирует. Девиация скорости является следствием девиации электродвигателя и условий в парах трения редуктора и исполнительного органа. Два привода с одинаковой закономерностью девиации невозможны.
В приводах подач металлорежущих станков, где основным типом электродвигателей являются высокомоментные машины постоянного тока, осуществляется стабилизация круговой частоты посредством обратной связи по скорости (главная обратная связь) и по току (дополнительная обратная связь). Для этого в электродвигатели встраивают соответствующие датчик обратной связи, например, тахогенератор для обратной связи по скорости. Однако автоматическое регулирование скоростей электродвигателей относительно какого-то значения, заданного напряжением задатчика, не может обеспечить одинаковость движения, т. е. положения двух равнозначных исполнительных органов. Объясняется это тем, что типовые традиционные обратные связи не могут учитывать различие в узлах, трения и различие в жесткости двух механических систем, т. е. редукторов и связанных с ними исполнительных органов. В итоге две равнозначные ведущие координаты, имеющие одинаковый путь, перемещаются неодинаково, в частности, один из исполнительных органов может раньше закончить перемещение, заданное по условиям работы. Такая неоптимальность движения обеих равнозначных координат снижает точность функциональных связей, в которые входят ведущие координаты, и, как следствие, снижает кинематическую точность обрабатываемых зубчатых колес.
Цель изобретения - повышение точности за счет оптимизации управления двумя равнозначными ведущими координатами.
Изобретение основано на том, что при рассогласовании положений по обеим координатам сигналы управления электродвигателями изменяются одновременно - для опережающей координаты управляющий сигнал уменьшается, а для отстающей координаты - увеличивается. В итоге рассогласованность движений устраняется одновременно за счет замедления одной координаты и ускорения другой. Следствием этого является уменьшение постоянной времени отработки корректирующего сигнала. Например, при одинаковой постоянной времени отработки каждой из координат результирующая постоянная равна половине постоянной времени одной координаты. Таким образом, возрастает быстродействие отработки погрешностей и уменьшается раскачка системы управления от среднего значения сигнала, что обеспечивает цель изобретения.
Фазовый дискриминатор определяет абсолютную величину отставания одного из исполнительных органов, а знаковый дискриминатор определяет какой из исполнительных органов отстает, устанавливая знак отстающей координаты. Посредством сигнала с выхода знакового дискриминатора включаются два ключа, управляемые одним и тем же по знаку сигналом. Оба ключа по этому сигналу сообщают абсолютную величину отставания, преобразованную в аналоговый сигнал, в параллельные сумматоры, где этот сигнал для отстающей координаты складывается с задающим сигналом, а для опережающей вычитается из задающего сигнала.
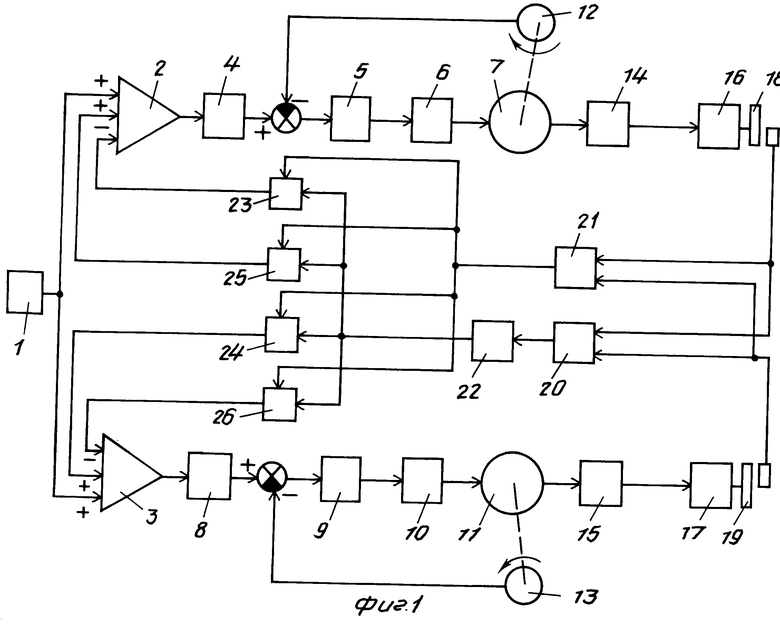
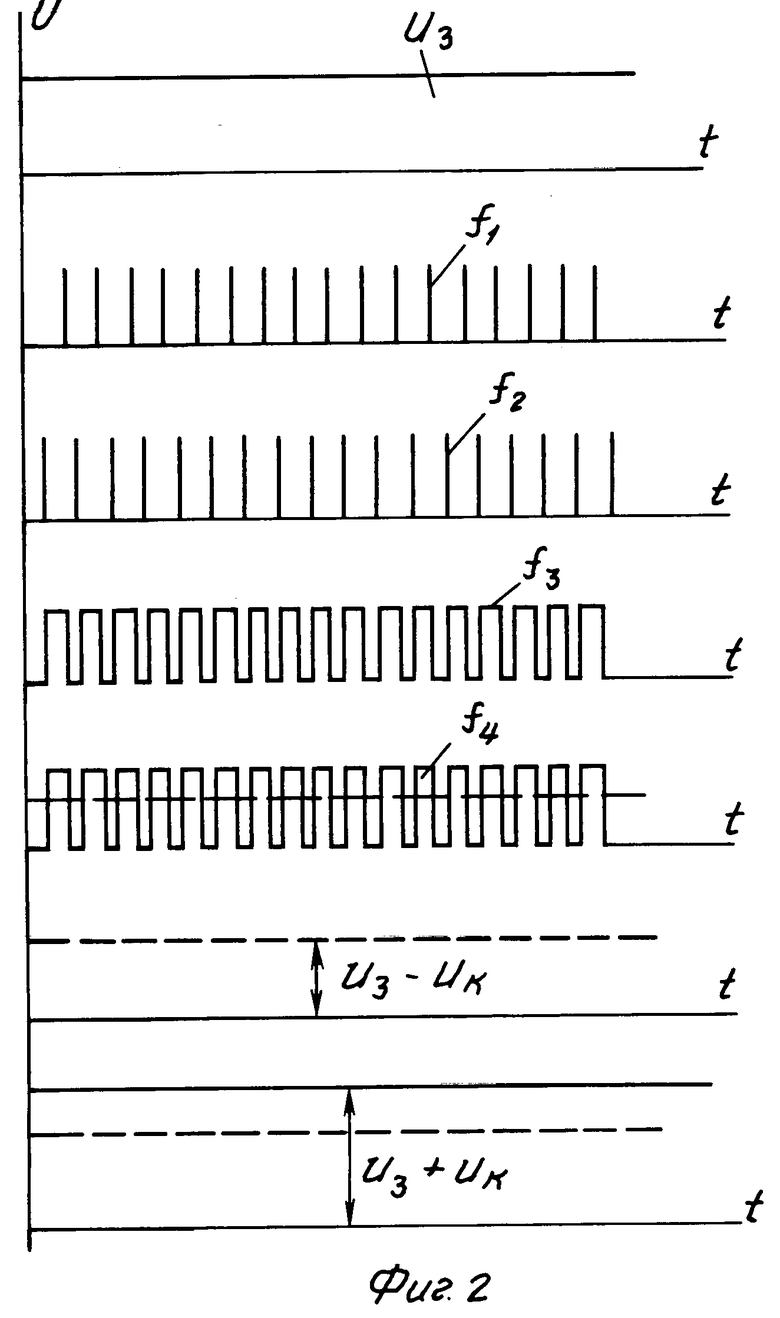
На фиг. 1 приведена блок-схема устройства управления приводами подач; на фиг. 2 - временная диаграмма.
Для управления приводами подач двух равнозначных исполнительных органов формируют задающий сигнал управления электродвигателями. Этот сигнал вырабатывает задатчик 1 в виде входного напряжения, которое в современных управляемых приводах станков изменяется от нуля до нескольких вольт. В качестве задатчика может использоваться источник питания со ступенчатым изменением выходного напряжения, что характерно для приводов подач станков с ЧПУ. Задатчик 1 соединен с первыми входами сложения первого 2 и второго 3 параллельных сумматоров.
Выход первого 2 параллельного сумматора через последовательно соединенные первый регулятор положения 4, первый регулятор скорости 5 и первый усилитель мощности 6 соединен с первым управляемым электродвигателем 7. Выход второго 3 параллельного сумматора через последовательно соединенные второй регулятор положения 8, второй регулятор скорости 9 и второй усилитель мощности 10 соединены со вторым управляемым электродвигателем 11.
В качестве регуляторов положения 4 и 8 используются П-регуляторы, а в качестве регуляторов скорости - ПИ-регуляторы. В электродвигатели 7 и 11 встроены тахогенераторы 12 и 13, являющиеся датчиками обратной связи по скорости. Тахогенераторы 12 и 13 соединены с входами регуляторов скорости соответственно 4 и 8. Обратная связь по скорости является главной обратной связью. Возможна также обратная связь по току якоря.
Электродвигатели 7 и 11 посредством редукторов 14 и 15 кинематически связаны с исполнительными органами, например продольными столами, соответственно 16 и 17 первой и второй ведущих координат. На исполнительных органах 16 и 17 установлены первый 18 и второй 19 импульсные измерительные преобразователи.
Выход первого импульсного измерительного преобразователя 18 соединен с первыми входами фазового дискриминатора 20 и знакового дискриминатора 21. Выход фазового дискриминатора 20 через импульсно-аналоговый преобразователь 22 соединен с аналоговыми входами первого 23 и второго 24 ключей, управляемых отрицательным потенциалом, и первого 25 и второго 26 ключей, управляемых положительным потенциалом.
Управляющие входы ключей соединены с выходом знакового дискриминатора 21. Второй вход сложения и вход вычитания первого 2 параллельного сумматора соединены с выходами ключей 25 и 23 соответственно. Второй вход сложения и вход вычитания второго 3 параллельного сумматора соединены с выходами ключей 24 и 26 соответственно.
Устройство работает следующим образом.
Задающий сигнал, формируемый в задатчике 1, одновременно сообщается через первые входы сложения первого 2 и второго 3 параллельных сумматоров, регуляторы положения 4 и 8, регуляторы скорости 5 и 9, первый 8 и второй 10 усилители мощности соответственно первому 7 и второму 11 электродвигателям, получающим вращательнего движение.
Круговые частоты электродвигателей независимо друг от друга за счет собственных обратных связей по скорости соответственно тахогенератор 12 - регулятор скорости 5 и тахогенератор 13 - регулятор скорости 9 автоматически регулируются.
Электродвигатели 7 и 11 через редукторы 14 и 15 сообщают движение исполнительным органам соответственно 16 и 17. В итоге исполнительные органы благодаря симметричности схемы прохождения задающего сигнала совершают движение синхронно со скоростью, пропорциональной заданному сигналу.
Действительные скорости и мгновенное положение исполнительных органов различаются из-за различных условий трения и различной жесткости механических систем обоих исполнительных органов. Поэтому в процессе перемещения непрерывно формируется сигнал, пропорциональный разности действительных положений исполнительных органов для коррекции синфазности перемещений.
Импульсные измерительные преобразователи 18 и 19 вырабатывают импульсные сигналы - аналоги действительных скоростей исполнительных органов соответственно 16 и 17. Эти сигналы поступают на входы фазового 20 и знакового 21 дискриминаторов для сравнения. На выходе фазового дискриминатора образуется импульсный сигнал, пропорциональный по частоте абсолютной разности действительных положений (скоростей) исполнительных органов. Этот сигнал преобразуется в аналоговый в импульсно-аналоговом преобразователе 22 и поступает на аналоговые входы ключей 23, 24, 25, 26.
На выходе знакового дискриминатора 21 образуется сигнал "-" при отставании второго 17 исполнительного органа или сигнал "+" при отставании первого 16 исполнительного органа. Знаковый сигнал с выхода знакового дискриминатора 21 поступает на управляющие входы ключей 23, 24, 25, 26, управляемые различным по знаку сигналом. При этом открываются два ключа, управляемые одним и тем же по знаку сигналом. Например, при отставании второго исполнительного органа 17 на выходе знакового дискриминатора 21 образуется отрицательный сигнал. Этот сигнал открывает ключи 23 и 24 управляемые отрицательным потенциалом. Через ключ 23 корректирующий сигнал поступает на вход вычитания первого 2 параллельного сумматора, а через ключ 24 - на второй вход сложения второго 3 параллельного сумматора. В результате на выходе первого параллельного сумматора 2 задающий сигнал уменьшается, а на выходе второго параллельного сумматора 3 возрастает. Пропорционально уменьшается скорость первого исполнительного органа 16 и возрастает скорость второго исполнительного органа.
При изменении знака на выходе знакового дискриминатора 21, что соответствует отставанию первого исполнительного органа 16, открываются ключи 25 и 26. В итоге сигнал коррекции одновременно поступает на второй вход сложения первого параллельного сумматора 2 и на вход вычитания второго параллельного сумматора 3. Пропорционально возрастает скорость первого исполнительного органа 16 и уменьшается скорость второго исполнительного органа 17.
Таким образом, за счет одновременного воздействия корректирующего сигнала на электродвигатели обоих исполнительных органов обеспечивается синфазность перемещений этих органов и посредством сведения их перемещений к ускоренному значению.
П р и м е р. Для управления приводами подач двух продольных столов, являющихся равнозначными ведущими координатами зубодолбежного станка с касательным врезанием, на котором обеспечивается одновременно два колеса, расположенных симметрично относительно оси долбяка, с задатчика 1 сообщается задающий сигнал Uз пропорциональный подаче, например, равной 0,3 мм/дв.ход, на оба привода через первые входы сложения первого 2 и второго 3 параллельных сумматоров. Электрические сигналы-аналоги f1 и f2 действительных скоростей соответственно первого 16 и второго 17 исполнительных органов показывают отставание первого исполнительного органа. Это отставание в знаковом дискриминаторе 21 преобразуется в сигнал f3 со знаком "+", а в фазовом дискриминаторе 20 - в сигнал f4, который преобразуется в аналоговый сигнал Uк, пропорциональный частоте, в импульсно-аналоговом преобразователе 22, с выхода которого этот сигнал поступает на входы ключей 23, 24, 25, 26.
Знаковый сигнал "+" открывает ключи 25 и 26. Сигнал Uк через ключ 25 поступает на второй вход сложения параллельного сумматора 2, а через ключ 26 этот сигнал поступает на вход вычитания параллельного сумматора 3. Результирующие сигналы на выходах параллельных сумматоров 2 и 3 соответственно Uз + Uк и Uз - Uк. В итоге движение отстающего первого исполнительного органа 16 ускорителя, а движение опережающего второго исполнительного органа 17 замедляется. При изменении знака на выходе знакового дискриминатора, что соответствует отставанию второго исполнительного органа 17, характер коррекции движений изменяется на противоположный.
Таким образом, скорости движения обеих координат сводятся к средней арифметической до тех пор, пока отставание одного из исполнительных органов не уменьшится до нуля. Интенсивность устранения рассогласования в предельном случае увеличивается в два раза по сравнению с прототипом, согласно которому сигнал рассогласования сообщают только одной, например отстающей, координате. Следовательно, благодаря повышению интенсивности устранения рассогласования обеспечивается оптимизация управления равнозначными координатами.
Изобретение по сравнению с прототипом обеспечивает оптимальные условия управления равнозначными координатами. Достигается это за счет того, что одновременно осуществляют коррекцию управляющих сигналов электродвигателей обоих исполнительных органов. Характер подачи этих сигналов такой, что опережающая координата при рассогласовании замедляется, а отстающая - ускоряется. В итоге период отработки рассогласования минимизируется, что является условием оптимального управления двумя равнозначными координатами. При одинаковой постоянной времени отработки рассогласования каждой из координат результирующая постоянная будет равна половине постоянной одной координаты.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДАМИ ПОДАЧ ДВУХ ИСПОЛНИТЕЛЬНЫХ ОРГАНОВ РАВНОЗНАЧНЫХ ВЕДУЩИХ КООРДИНАТ ЗУБОДОЛБЕЖНОГО СТАНКА | 1991 |
|
RU2025256C1 |
| Устройство для синхронизации приводов врезания и профилирования зубодолбежного станка | 1988 |
|
SU1565649A2 |
| Роторный зубодолбежный станок с ЧПУ | 1989 |
|
SU1779542A1 |
| РОТОРНЫЙ ЗУБОДОЛБЕЖНЫЙ СТАНОК | 1991 |
|
RU2022729C1 |
| СИСТЕМА УПРАВЛЕНИЯ ЗУБОДОЛБЕЖНЫМ СТАНКОМ С ЧПУ | 1988 |
|
RU2023551C1 |
| Устройство для синхронизации приводов врезания и профилирования зубодолбежного станка | 1986 |
|
SU1371862A1 |
| Роторный зубодолбежный станок | 1987 |
|
SU1583229A1 |
| Устройство управления зубодолбежным станком | 1990 |
|
SU1773683A1 |
| Зубодолбежный станок | 1990 |
|
SU1734984A1 |
| ЗУБОДОЛБЕЖНЫЙ СТАНОК | 1991 |
|
RU2025233C1 |
Использование: для управления приводами ведущих координат зубообрабатывающих станков с программным управлением. Сущность изобретения: одновременно с задающим сигналом для электродвигателей обеих координат формируют и корректирующий сигнал, пропорциональный разности действительных скоростей координат. Корректирующий сигнал для отстающей координаты складывают с управляющим, а для опережающей координаты - вычитают из управляющего сигнала. 2 ил.
УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДАМИ ПОДАЧ ДВУХ ИСПОЛНИТЕЛЬНЫХ ОРГАНОВ РАВНОЗНАЧНЫХ ВЕДУЩИХ КООРДИНАТ ЗУБОДОЛБЕЖНОГО СТАНКА, содержащее задатчик, соединенные последовательно первый регулятор скорости и первый усилитель мощности с первым регулируемым электродвигателем, кинематически связанным через первый редуктор с первым исполнительным органом, на котором установлен первый импульсный измерительный преобразователь, соединенные последовательно второй регулятор скорости и второй усилитель мощности с вторым регулируемым электродвигателем, кинематически связанным через второй редуктор с вторым исполнительным органом, на котором установлен второй импульсный измерительный преобразователь, причем регулируемые электродвигатели охвачены отрицательными обратными связями, выполненными в виде первого и второго тахогенераторов, встроенных в соответствующие регулируемые электродвигатели и соединенных с входами соответственно первого и второго блоков сравнения, связанных с соответствующими регуляторами скорости, отличающееся тем, что, с целью повышения точности, устройство снабжено первым и вторым параллельными сумматорами, первым и вторым регуляторами положения, первым, вторым, третьим и четвертым ключами, импульсно-аналоговым преобразователем, фазовым дискриминатором и знаковым дискриминатором, при этом первые входы сложения параллельных суматоров соединены с выходами задатчика, второй вход сложения и вход вычитания первого параллельного сумматора соединены соответственно с выходами первого и второго ключей и первым ключом, второй вход сложения и вход вычитания второго параллельного сумматора соединены соответственно с выходами третьего и четвертого ключей, аналоговые входы ключей соединены с выходом импульсно-аналогового преобразователя, соединенного своим входом с выходом фазового дискриминатора, у которого первый и второй входы соединены соответственно с первым и вторым импульсными измерительными преобразователями, управляющие входы ключей соединены с выходом знакового дискриминатора, у которого первый и второй входы соединены соответственно с первым и вторым импульсными измерительными преобразователями, выходы первого и второго параллельных сумматоров соединены с входами соответственно первого и второго регуляторов положения, соединенных своими выходами с входами соответственно первого и второго регуляторов скорости.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для синхронизации приводов врезания и профилирования зубодолбежного станка | 1986 |
|
SU1371862A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
