1
Изобретение относится к области автоматики и может быть использовано в связанных системах автоматического управления (САУ).
Известная САУ содержит задатчик скорости и последовательно соединенные блок стабилизации скорости, датчик положения, выход которого подключен к одному из входов сумматора, а к другим его входам подсоединены выходы других датчиков положения и силовой следящий контур, содержащий устройство сравнения.
Блок стабилизации скорости в таких САУ по своему быстродействию обычно на 2-2,5 порядка превосходит силовой следящий контур.
Недостатком такой САУ является наличие .значительного перерегулирования и повыщен.ная длительность переходного процесса при скачкообразном изменении уставки задатчика скорости.
С целью устранения перерегулирования и повышения быстродействия ситемы, она содержит фазовый дискриминатор, вход, которого подключен к выходу устройства сравнения силового следящего контура, источник опорного сигнала и два пороговых устройства, сигнальные входы которых соединены с выходами фазового дискриминатора, опорные входы - с источником опорного сигнала, два
ключа, управляющие входы которых связаны с выходами соответствующих пороговых устройств, два источника сигнала максимальной скорости, подключенные через соответствующие ключи ко ъхо.т.у блока стабилизации скорости, два выпрямителя и третий ключ, управляющий вход, которого связан через согласно включенные выпрямители с выходами пороговых устройств, а выход задатчика скорости соединен со входом блока стабилизации скорости через третий ключ.
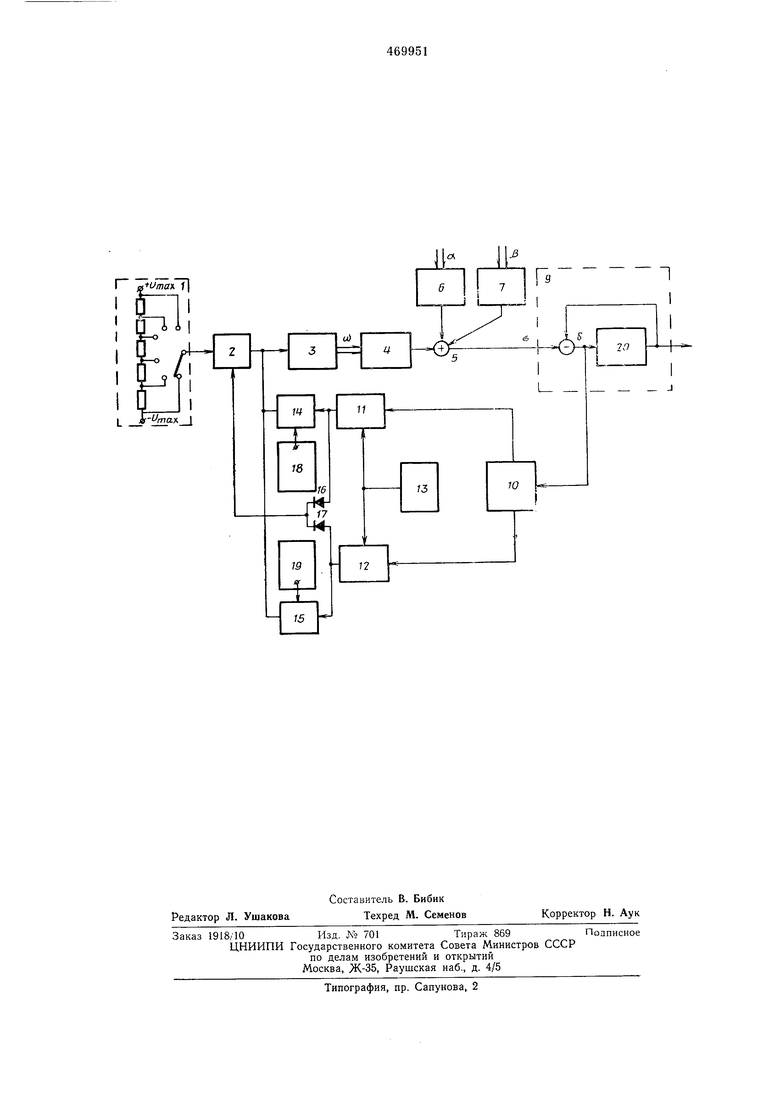
На чертеже приведена схема системы автоматического управления. Система автоматического управления содержит задатчик скорости 1, ключ 2, блок стабилизации скорости 3, датчик положения 4, сум.М а гор 5, датчики положения 6, 7, устройство сравнения 8 силового следящего контура 9, фазовый дискриминатор 10, пороговые устройства 11, 12, источник опорного сигнала 13, ключи 14, 15, выпрямители 16, 17, источники сигналов максимальной скорости 18, 19 и привод 20. Система работает следующим образом.
В установивщемся режиме сигнал задания скорости поступает с задатчика скорости 1, через открытый ключ 2, на вход, блока стабилизации скорости 3, выходной вал со которого, соединен с датчиком положения 4.
Сигнал датчика положения 4 суммируется сумматором 5, с сигналами датчиков положения 6, 7, соединенных с валами а, (3.
Суммарный сигнал а с выхода сумматора 5 поступает в устройство сравнения 8 силового следящего контура 9, который отрабатывает его с ошибкой 6, имеющейся на выходе устройства сравнения.
Сигнал ощибки 6 поступает через фазовый дискриминатор 10, различающий знак ощибки, на сигнальные входы пороговых устройств 11, 12.
В установившемся режиме пороговые устроства 11, 12 не срабатывают, так как выходной сигнал фазового дискриминатора 10 не превосходит величины сигнала, поступающего на опорные входы пороговых устройств от источника опорного сигнала 13.
При этом ключ 2, подключенный управляющим входом через согласно включенные разделительные выпрямители 16, 17 к выходам пороговых устройств 11, 12 соответственно, замкнут, а ключ 14 или 15, соединенный управляющим входом с выходом порогового устройства 11 или 12, разомкнут, и источники сигналов максимальной скорости 18 или 19 отключены от входа блока стабилизатора скорости 3. Таким образом, силовой следящий контур 9 отрабатывает скорость, соответствующую уставке задатчика скорости 1. Отработка следящего контура в установившемся режиме может дополнительно корректироваться поворотом валов аир, что не вызывает срабатывания пороговых устройств, так как скорости поворота валов а и |3 невелики, и сигнал ошибки б, преобразованный фазовым дискриминатором, не превыщает величины опорных сигналов.
При скачкообразном изменении уставки задатчика скорости 1 силовой следящий контур 9 не отрабатывает изменение угла поворота вала блока стабилизации скорости 3, поскольку последний обладает значительно большим быстродействием. Сигнал ошибки возрастает до величины, при которой напряжение на сигнальном входе порогового устройства И или 12 (в зависимости от знака ощибки б) достигает значения опорного сигнала, что и вызывает срабатывание порогового устройства. При этом ключ 14 или 15 замыкается, а ключ 2 размыкается, и ко входу блока стабилизации скорости 3 подключается сигнал максимальной скорости, знак которой противоположен той, которая задана уставкой задатчика скорости 1. Блок стабилизации скорости реверсирует и с максимальной скоростью уменьшает сигнал ошибки б силового следящего контура. При
уменьшении сигнала ошибки б до значения, при котором напряжение на сигнальном входе порогового устройства меньше опорного сигнала, пороговое устройство устанавливается в исходное состояние, и ключ 2 замыкается, а ключ 14 или 15 размыкается. При этом система стабилизации скорости 3 вновь приобретает скорость, соответствующую уставке задатчика скорости 1.
При переключениях ключей 2, 14 и 15, знак сигнала ошибки не изменяется, поэтому силовой следящей контур 9 с максимально возможной интенсивностью переводится на режим вращения со скоростью, соответствующей
уставке задатчика и без перерегулирования приобретает ее.
Длительность интервала времени, в течении которого вход блока стабилизации скорости 3 отключен от задатчика скорости 1 и
подключен через ключ 14 или 15 к источнику сигнала максимальной скорости 18 или 19, и число таких интервалов определяются результатом сравнения сигналов с выхода фазового дискриминатора и опорного сигнала.
Величина опорного сигнала определяется параметрами системы автоматического управления.
Предмет изобретения
Система автоматического управления, содержащая задатчик скорости и последовательно соединенные блок стабилизации скорости, датчик положения, выход которого подключен к одному из входов сумматора, а к другим его
входам подсоединены выходы других датчиков положения и силовой следящий контур, содержащий устройство сравнения, отличающаяся тем, что, с целью устранения перерегулирования и повышения быстродействия системы, она содержит фазовый дискриминатор, вход которого подключен к выходу устройства сравнения силового следящего контура, источник опорного сигнала и два пороговых устройства, сигнальные входы которых соединены с выходами фазового дискриминатора, опорные входы - с источником опорного сигнала, два ключа, управляющие входы которых связаны с выходами соответствующих пороговых устройств, два источника сигнала максимальной скорости, подключенные через соответствующие ключи ко входу блока стабилизации скорости, два выпрямителя и третий ключ, управляющий вход которого связан через согласно включенные выпрямители с выходами пороговых устройств, а выход задатчика скорости соединен со входом блока стабилизации скорости через третий ключ, Г I L fUmaiTTl А /лахI

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для частотного пуска и синхронизации с сетью синхронной машины | 1983 |
|
SU1252890A1 |
| Следящий привод для компенсации ки-НЕМАТичЕСКиХ пОгРЕшНОСТЕй МЕХАНизМОВ | 1979 |
|
SU817959A1 |
| Копировальная система | 1979 |
|
SU841916A1 |
| Устройство для автоматического регулирования постоянного тока | 1977 |
|
SU684526A1 |
| Следящая система | 1989 |
|
SU1732329A1 |
| Стабилизированный электропривод | 1985 |
|
SU1302411A1 |
| Следящая система | 1975 |
|
SU555377A1 |
| Следящая система | 1981 |
|
SU962844A1 |
| Реверсивный асинхронный электропривод | 1988 |
|
SU1539951A1 |
| Статический преобразователь частоты для синхронной машины | 1977 |
|
SU699626A1 |