1
Изобретение относится к следящим системам, управляемым трансформаторными дистанционными передачами.
Известна следящая система, содержащая усилитель, двигатель, СКВТ - приемник и элементыцепи обратной связи - фазе- чувствительный выпрямитель, корректируюшее звено и модулятор. В этой следящей системе для устранения погрешности от фазового сдвига между опорным напряжением модупятора и напряжением сигнала ошибки на выходе СКВТ-приемника квадратурная обмотка СКВХ-приемника подключена к входу опорного напряжения модулятора. Однако в этой следящей системе не устраняется no грешность, определяемая собственными ошибкми вращающихся трансформаторов (либо сельсинов) от различных причин и погрешностью от ассиметрии параметров линии связи (лс) соединяющей между собой вращающийся трансформатор (ВТ)-датчик и приемник, что требует в свою очередь применения дорогостоящих высокоточных ВТ и высококачественного кабеля. Нестабильность параметров ЛС и сельсинов приводит к изменению
погрешности, что делает затруднительным использование компенсирующих средств.
Известна следящая система, которая содержит каналы грубого и точного отсчета из вращающихся трансформаторов (ВТ)- датчиков и приемников, связанных между собой пиниями связи, элементы силовой следящей системы (усилитель - коммутатор и двигатель), маломощную внутреннюю следящую систему (усилитель и серводвигатель) с ВТ приемником точного отсчета и с дополнительным ВТ на ее валу, связанным электрически с многополюсным ВТ на оси отработки силовой следящей системы Внутренняя следящая система играет роль электрического редуктора между осью отработки и ВТ- приемником точного отсчета.
Недостатком этой следящей системы является ее громоздкость, высокая стоимост а также наличие погрешности, вносимой внутренней следящей системой.
Наиболее близкой по технической сущности к изобретению является следящая система, содержащая последовательно соединенные корректирующее звено, усилитель, двигатель с редуктором, механически связанный с вращающимся трансформатором - приемником, обмотка управления которого подключена к сигнальному входу первого фазового дискриминатора, а обмотка синхронизации - к обмотке синхронизации вращающегося трансформатор-датчика, и источник питания.
Ошибка этой системы содержит соответственно погрешности ВТ и погрешность, вносимую линией связи; ей присущи недостатки системы.
Цель изобретения - повышение точности следящей системы.
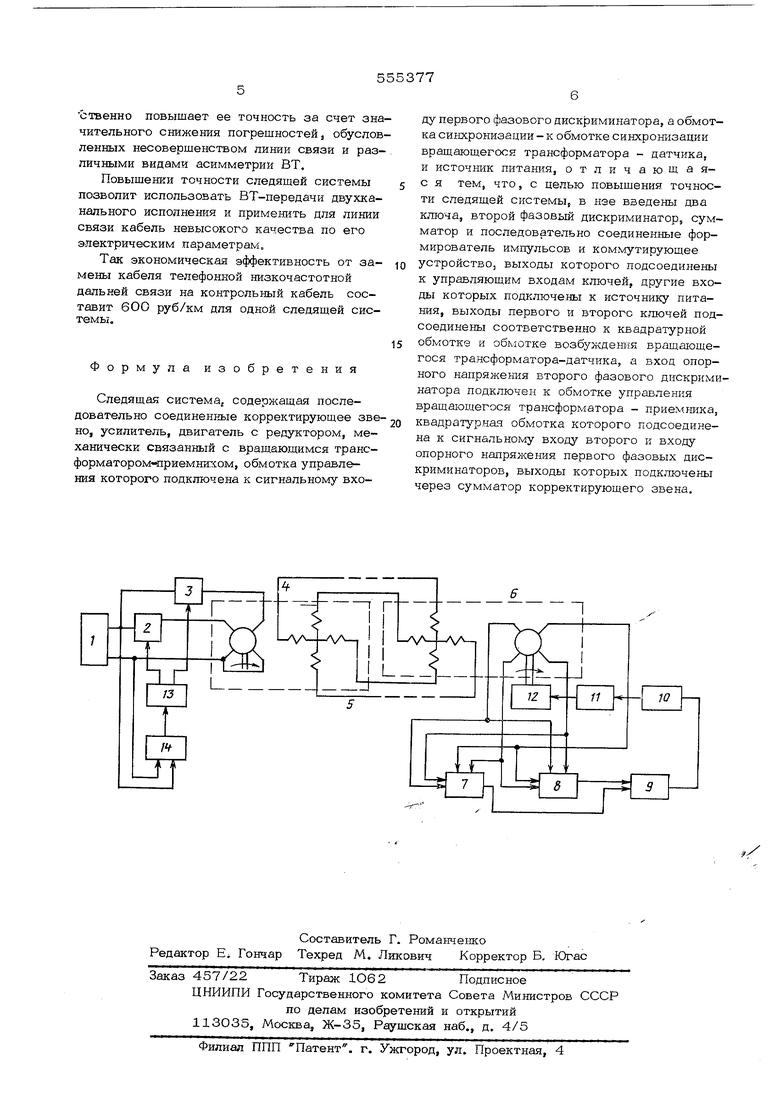
Достигается это тем, что в схему еле- дящей системы введены два ключа, второй фазовой дискриминатор, сумматор и последовательно соединенные формирователь импульсов и коммутирующее устройство, выходы которого подсоединены к управляющим входам ключей, другие входы которых подсоединены к источнику питания, выходы первого и второго ключей подсоединены соответственно к квадратурной обмотке и обмотке возбуждения вращающегося трансформатора-датчика, а вход опорного напряжения второго фазвого дискриминатора подключен к обмотке управления вращающегося трансформатораприемника, квадратурная обмотка которого подсоединена к сигнальному входу второго и входу опорного напряжения первого фазовых дискриминаторов, выходы которых подключены через сумматор к входу корректирующего звена. На чертеже представлена структурная
схема системы.
Система содержит источник питания (ИП 1, первый и втрой ключи 2, 3, вращающийся трансформатор (ВТ)-датчик 4, линшо связи 5, вращающийся трансформатор - приемник 6, первый и второй фазовые дискримнаторы (ФД) 7, 8 сумматор 9, корректирующее звено 10, усилитель 11, двигатель с редуктором 12, коммитирующее устройство (КУ) 13, формирователь импульсов 14.
Такая схема предназначена для- режима точного слежения при малом угле рассогласования осей вращающихся трансформаторов следящей системы.
С момента начала работы формирователя импульсов 14 на выходе коммутирующего устройства 13 появляются импульсы, которые поочередно через ключи 2, 3 подсоединяют в течение полутакта коммутации либо обмотку управления, либо квадратурную обмотку ВТ-датчика 4 к источнику питания
Частота коммутации равна и со , где 60 угловая частота напряжения питания , а
П - число периодов напряжения питания в течение такта коммутации.
При подключении ИП 1 к обмотке управления ВТ-датчика 4 напряжэ:а;е fL, Е fj на синусной и косинусной обмоткам CKiixpoнизации ВТ-датчика 4 трансфорклируются на обмотке управления и квадратурной обмотке ВТ - приемника в напряженне
Uo,,UoK jKj,{5m (оС-р)4-дК.0|ц 2сс+лК2 cos 2ix} и„--ди,+ли,и
и„е ()
где UQ - напряжение питания ИП 1; напряжение сигнала ошибки и опорное напряжение, необходимое для работы ФД;
об - угол поворота ВТ - датчика; /3 - угоп поворота ВТ - приемника При незначительной величине сС - р моно считать, ,
SiH(oC-p)oc-j3
cos{cc-j3) ij
ли.,д1/2 - погрешности двойной периодичности угла поворота ВТ (5), обусловленны большим числом причин J
KjiKj- коэффициент трансформации ВТдатчика 4 и ВТ -приемника 6.
Сигнал Uj. в качестве опорного напряжения является слишком малым для нормальной работы фазового дискриминатора Поэтому на выходе фазового дискриминатора 7, 8 и сумматора, будет
При подключении источника питания 1 к квадратурной обмотке ВТ - датчика 4
иоу и,„;и,, и„-ли,-лиг.
На выходе фазовых дискриминаторов 7,8 к сумматора
c. ,-AU,; и,, 0.
Таким образом, в течение такта 17. остается неизменным на выходе сумматора, a&U и ли, меняет знак.
Длина такта выбрана из расчета, что чатота по) значительно больше по величине частоты пропускания следящей системы, которая по своим динамическим свойствам является узкополюсным низкочастотным фильтром.
Знакопеременная погрешность практически не отрабатывается следящей системой. Нестабильность параметров линии связи и ВТ не играет существенной роли в создании погрешности, так как нестабильность носит медленно меняющийся характер по времени.
Таким образом, использование новых элементов в схеме следящей системы суще- ственно повышает ее точность за счет зна чительного снижения погрешностей 5 обуслов ленных несовершенством линии связи и различными видами асимметрии ВТ. Повышении точности следящей системы позволит использовать ВТ-нередачи двухканального исполнения и применить для линии связи кабель невысокого качества по его электрическим параметрам. Так экономическая эффективность от замены кабеля телефонной низкочастотной дапьней связи на контрольный кабель составит 6 ОС руб/км для одной следящей сисФормула изобретения Следящая система, содержащая последовательно соединенные корректирующее зве но, усилитель, двигатель с редуктором, механически связанный с вращающимся трансформатором-яриемнихом, обмотка управления которого подключена к сигнальному входу первого фазового дискриминатора, а обмотка синхронизации - к обмотке синхронизации вращающегося трансформатора - датчика, и источник питания, отличающаяс я тем, что S с целью повышения точности следящей системы, в нэе введены два ключа, второй фазовый дискриминатор, сумматор и последовательно соединенные формирователь импульсов и коммутирующее устройство, выходы которого подсоединены к управляющим входам ключей, другие входы которых подключе.ны к источнику питания, выходы первого и второго ключей подсоединены соответственно к квадратурной обмотке и обмотке возбуждешгя вращающегося трансформатора-датчика, а вход опорного напряже жя второго фазового дискриминатора подключен к обмотке управления вращающегося трансформатора - приемника, квадратурная обмотка которого подсоединена к сигнальному входу второго и входу опорного напряжения первого фазовых дискриминаторов, выходы которых подключены через сумматор корректирующего звена.
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящий вентильный электропривод | 1982 |
|
SU1241400A1 |
| Преобразователь кода в угловое положение вала | 1983 |
|
SU1088048A1 |
| Устройство для задания угла поворота | 1979 |
|
SU849269A1 |
| Система стабилизации бурового судна | 1986 |
|
SU1360405A1 |
| Фазовая следящая система | 1974 |
|
SU552587A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ СЛЕДЯЩЕЙ СИСТЕМЫ | 1979 |
|
SU826287A1 |
| Импульсно-фазовая следящая система | 1982 |
|
SU1095131A1 |
| Фазовая следящая система | 1976 |
|
SU779970A1 |
| СЛЕДЯЩАЯ СИСТЕМА | 1973 |
|
SU366454A1 |
| Преобразователь угла поворота валаВ КОд | 1979 |
|
SU840998A1 |
V т
