1
Установка предназначена для измерения трехмерного потока между лопастями гребного винта в процессе его работы как в свободно набегающем потоке, так и в следе за буксируемой моделью судна.
Известные установки содержат измерительный зонд, закрепленный на полом гребном валу, в котором расположены дифференциальные датчики давления, угловой и осевой координатники дистанционного управления, причем полый гребной вал снабжен электроприводом.
Цель изобретения - повышение точности и ускорение процессов измерений и координации зонда, а также расширение объема получаемой информации. Это достигается тем, что измерительный зонд, дифференциальные датчики давления и угловой координатник дистанционного управления расположены на подвижном блоке, который кинематически связан через токосъемник с осевым координатником дистанционного управления и смонтирован в полом гребном валу, при этом в стеике последнего выполнено окно для прохода поворотно-телескопической державки. Подвижный блок установлен на шестерне с внутренним зацеплением, кинематически связанной с угловым координатником и аксиально подвижной относительно полого гребного вала, на статоре токосъемника установлена
гайка, кинематически взаимодействующая с ходовым винтом осевого координатника.
Поворотно-телескопическая державка выполнена с кожухом, в верхней части которого смонтирован цанговый , а внутри располол ен цилиндрический вкладыш из эластичного материала с поперечными пазами, сообщающимися с продольными каналами, гидравлически связанными с приемником измерительного зонда.
Установка выполнена с подводным сигарообразным корпусом, в котором размещены полый гребной вал, токосъемник и гайка с ходовым винтом осевого координатника, размещенного в обтекаемой стойке. Стойка соед няет подводный сигарообразный корпус с надводной фермой, внутри которой расположен электропривод полого гребного вала.
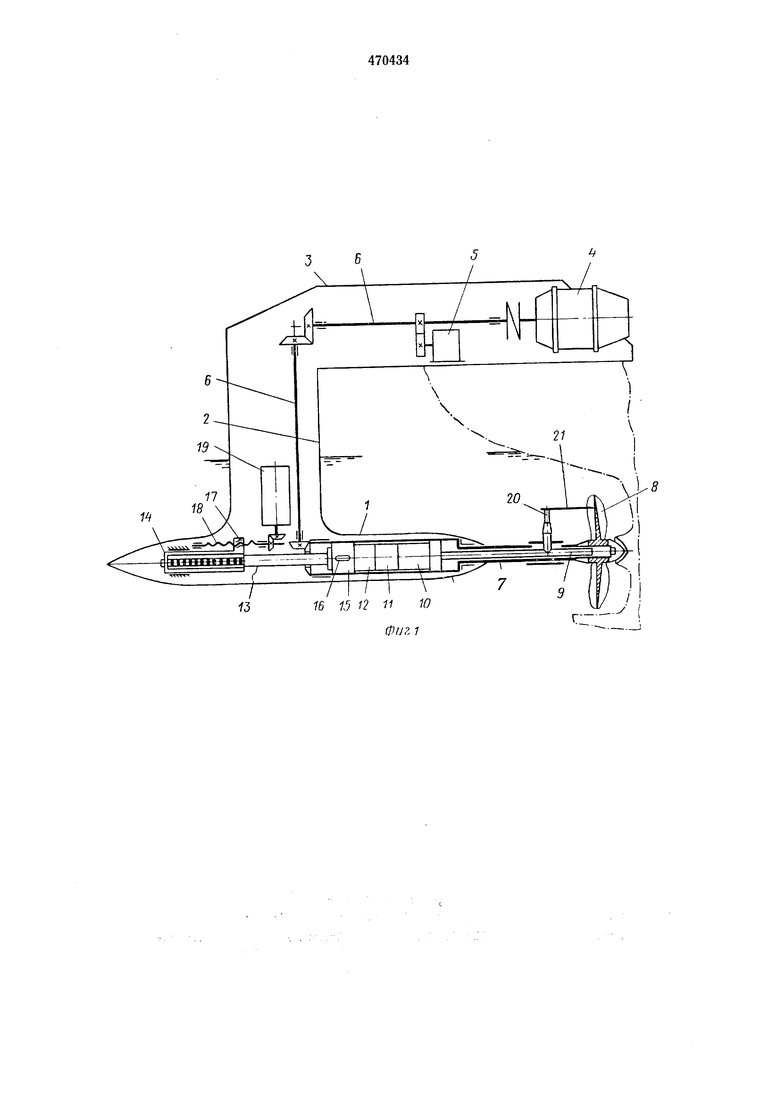
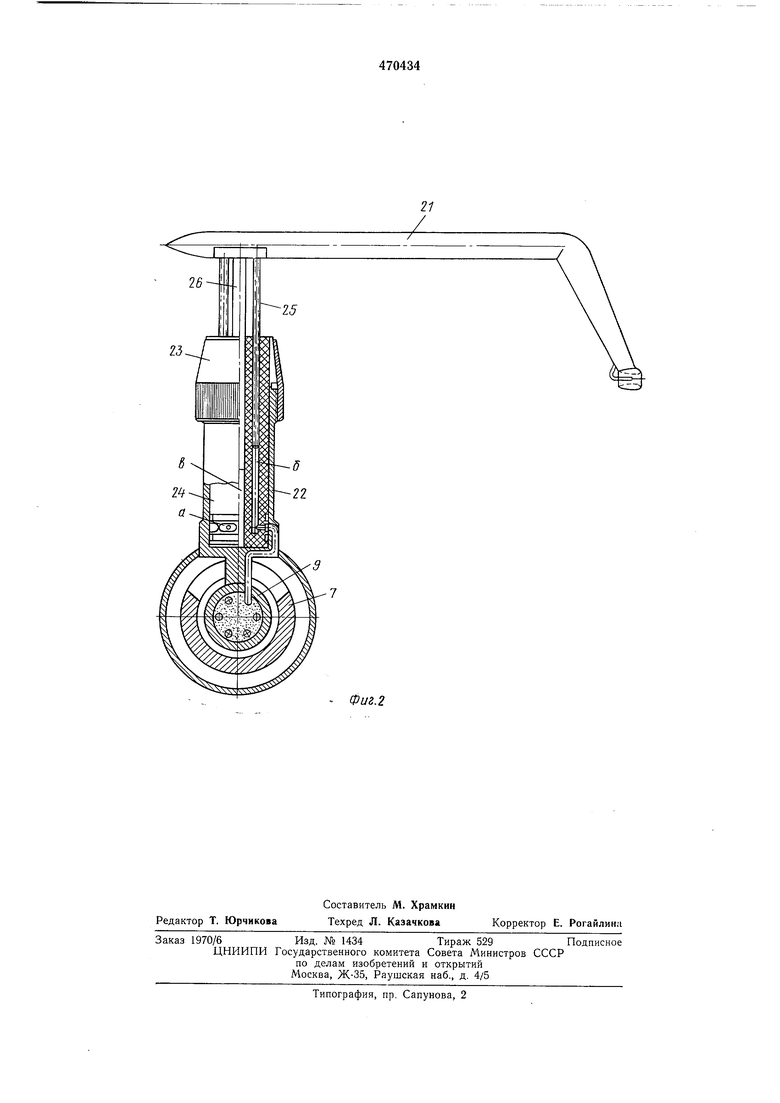
На фиг. 1 схематически изображена предлагаемая установка в разрезе; на фиг. 2 - поворотно-телескопическая державка в разрезе.
Основные узлы установки скомпонованы в подводном сигарообразном корпусе 1, который посредством обтекаемой стойки 2 соединен с надводной фермой 3. Внутри последней размеще электропривод, содержащий электродвигатель 4, датчик оборотов 5 и вращающий валопровод 6, обеспечивающий работу по.лого гребного вала 7 с гребным винтом 8.
Вал 7 в виде ступенчатой трубы установлен в корпусе 1 на радиалыю-упорных подшипниках.
Внутри вала 7 находится подвижный блок, состоящий из штока 9, дифференциальных датчиков 10 давления, датчиков 11, углового координатника 12 дистанционного управления, ротора 13 и статора 14 токосъемника. Подвижный блок установлен на шестерне 15 с внутренним зацеплением, перемещаюш,ейся аксиально внутри вала 7 на шпонке 16 и кинематически связанной с координатником 12, и через токосъемник, подвижный в осевом направлении, и гайку 17, установленную на статоре токосъемника и кинематически взаимодействующую с ходовым винтом 18, кинематически связан с осевым координатником 19 дистанционного управления, размещенным в стойке 2.
На штоке 9 уста ювлена поворотно-телескопическая державка 20 измерительного зонда 21. Державка проходит через окно в стенке гребного вала и выполнена с кожухом 22, который в верхней части оканчивается цанговым зажимом с гайкой 23. Внутри кожуха расположен цилиндрический вкладыш 24 из эластичного материала с поперечными пазами а, сообщающимися с продольными каналами б, гидравлически связанными с приемником зонда 21 лри помощи трубок 25. Для жесткости крепления зонд имеет стержень 26. установленный в центральном канале в вкладыша 24. Вал 7, токосъемник, гайка 17 и винт 18 размещены в корпусе 1.
Независимо от режима работы вала 7, приводимого во вращение от электродвигателя 4 посредством валопровода 6, подвижный блок перемещает зонд 21 в цилиндрической системе координат относительно вращающегося винта 8. Это перемещение осуществляется с помощью углового 12 и осевого 19 координатников дистанционного управления. Радиальное перемещение и измерение его шагового угла производят вручную. Для этого ослабляют цанговый зажим гайкой 23, выдвигают зонд 21 из вкладыша 24 на заданную величину радиуса, поворачивают зонд вместе с вкладышем на необходимый шаговый угол и фиксируют это положение гайкой 23.
Установка предлагаемой конструкции позволяет повысить точность и быстродействие измерения за счет уменьшения длины гидравлического тракта и исключения подвижных уплотняющих устройств в нем, точность и быстродействие координации зонда, а также число степеней свободы за счет размещения подвижного блока внутри гребного вала и применения дистаьщиониого управления коордииатниками, расширить объем нолучаемой информации благодаря увеличению числа степеней свободы перемещения зонда и применению шеститочечного измерительного зонда.
Предмет изобретения
1. Установка для измерения трехмерного потока между лопастями вращающегося г)ебпого винта, содержащая измерительный зонд, закрепленный на полом гребном валу, в котором расположены дифференциальные датчики давления, осевой и угловой координатники дистанционного управления, причем полый гребной вал снабжен электроприводом, отличающаяся тем, что, с целью повышения точности и ускорения процессов измерений, а
также расширения объема информации, измерительный зонд, дифференциальные датчики давления и угловой координатник дистанционного управления расположены на подвижном блоке, который кинематически связан
через токосъемник с осевым координатником дистанционного управления и смонтирован в полом гребном валу, при этом в стенке последнего выполнено окно для прохода поворотно-телескопической державки, подвижный
блок установлен на шестерне с внутренним зацеплением, кинематически связанной с угловым координатником дистанционного управления и аксиально подвижной относительно полого гребного вала, а на статоре токосъемника установлена гайка, кинематически взаимодействующая с ходовым винтом осевого координатника дистанционного управления.
2.Установка по п. I, отличающаяся тем, что поворотно-телескопическая державка
выполнена с кожухом, в верхней части которого смонтирован цанговый зажим, а внутри расположен цилиндрический вкладыш из эластичного материала с поперечными пазами, сообщающимися с продольными каналами, гидравлически связанными с приемником измерительного зонда.
3.Установка по пп. 1 и 2, о т л и ч а ю щ а яся тем, что она выполнена с подводным сигарообразным корпусом, в котором размещены полый гребной вал, токосъемник и гайка с ходовым винтом осевого координатника дистанционного управления, размещенного в обтекаемой стойке, соединяющей подводный
сигарообразный корпус с надводной фермой, внутри которой расположен электропривод полого гребного вала. 16 15 12 11 10 . фиг 7 -V
Фиг. 2
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения гидродинамических нагрузок на модели гребного винта | 1982 |
|
SU1082672A1 |
| Узел ручного управления | 1981 |
|
SU1068917A1 |
| СТЕНД ДЛЯ ОПРЕДЕЛЕНИЯ УСИЛИЙ РЕЗАНИЯ ГРУНТА | 1999 |
|
RU2158422C1 |
| КОРАБЛЬ ГИДРОГРАФИЧЕСКОЙ И ПАТРУЛЬНОЙ СЛУЖБЫ | 2010 |
|
RU2459738C2 |
| Стенд для испытаний моделей судовыхдВижиТЕлЕй | 1979 |
|
SU800765A1 |
| ДВИГАТЕЛЬНО-ДВИЖИТЕЛЬНАЯ УСТАНОВКА ПОДВОДНОГО АППАРАТА | 2022 |
|
RU2783719C1 |
| Устройство для измерения скорости в потоке жидкости | 1991 |
|
SU1781613A1 |
| СПОСОБ ПРИЕМА В ПОДВОДНУЮ ЛОДКУ АВТОНОМНЫХ НЕОБИТАЕМЫХ ПОДВОДНЫХ АППАРАТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2328407C1 |
| Микрокоординатник для исследования пограничного слоя | 1972 |
|
SU471521A1 |
| УСТАНОВКА ДЛЯ ИСПЫТАНИЯ МОДЕЛЕЙ СУДОВ | 1969 |
|
SU251224A1 |