Изобретение относится к приборным устройствам, с помощью которых производится измерение параметров газовых потоков (скорости, направления скорости, перепадов давления, температуры) в проточных частях газотурбинных установок, центробежных и осевых компрессоров, турбин, аэродинамических труб и других газодинамических установок. Известны узлы ручного управления координатников, конструкция которых основана на принципе действия микрометрического винта, содержащие ходовой винт, в котором закрепляется датчик, для измерения параметров потока, неподвижный корпус, неподвижную, связанную с корпусом втулку, поворотную втулку и ходовую гайку для перемещения ходового виНта. Кроме узлов ручного управления существуют узлы с дистанционным управлением с механическим или электрическим приводом 1. Использование узлов координатников создает более благоприятные условия для исследователя, однако из-за сложности электрических и кинематических схем таких устройств, их относительной ненадежности и высокой стоимости они йе находят столь щирокого применения, как координатники с узлами ручного управления. Известен узел ручного управления координатника, содержащий ходовой винт, неподвижный корпус, неподвижную связанную с корпусом втулку, поворотную втулку, ходовую гайку, направляющие колодки, отжимаюи 1ие пружины, а также элементы сборки и крепления 2. С помощью поворотной втулки -ходовой винт имеет возможность поворачиваться вокруг своей оси и перемещаться в продольном направлении. Угловое положение насадки (датчика), закрепленного на ходовом винте, определяется по щкале лимба с точностью до 0,5°. Стопорный винт фиксирует ходовой винт в любом нужном положении при повороте его от О до 360°. При фиксированном в угловом направлении ходовом винте с помощью ходовой гайки производится движение в осевом направлении с точностью до 0,3 мм. В известном узле ручного управления конструкции поворотной втулки предусматривает расположение ходовой гайки последовательно с деталями углового перемещения, что обусловливает применение значительного количества дополнительных деталей. Кроме того, такая конструкция, предусматривающая расположение этих деталей одна за другой, увеличивает габарит координатника в осевом направлении, а вследствии этого уменьшает «полезную длину ходового винта (максимальный ход винта в осевом направлении) на величину, равную осевому размеру ходовой гайки. Цель изобретения - упрощение конструкции путем уменьщения количества деталек, уменьшение осевого габарита узла и увеличение «полезной длины ходового винта при сохранении его общей длины. Цель достигается тем, что в узле ручного управления, содержащем коаксиально расположенные неподвижную, связанную с корпусом втулку и поворотную втулку, ходовую гайку, направляющие колодки, связанные с поворотной втулкой и соосно расположенные с ходовым винтом с лысками, в поворотной втулке выполнены прорезные окна, ходовая гайка расположена внутри поворотной втулки, а направляющие колодки выполнены в виде лепестков, установленных на поворотной втулке по обеим сторонам от лысок ходового винта. На ходовой гайке имеется щкала деления, один оборот ходовой гайки соответствует осевому перемещению ходового винта, равному 0,5 мм. Точность осевого перемещения составляет 0,05 мм. Поворот ходового винта с датчиком определяется от 0° до 360° с точностью до 0,5°, что отмечается стрелкой на лимбе. На чертеже показан предлагаемый узел ручного управления, общий вид. Устройство состоит из неподвижного корпуса 1, с помощью которого крепится на испытательной аэродинамической установке, лимба 2, закрепленного на неподвижном корпусе, стопорных винтов 3 и 4, поворотной втулки 5, имеющей скользящую посадку с Неподвижным корпусом-втулкой, направляющих колодок 6, отжимающей пружины 7 и прокладки 8. В поворотной втулке 5 имеюся прорезные симметричные окна, которые служат для установки ходовой гайки 9, а также для вращения ходовой гайки во время работы. Устройство состоит также из крепежных винтов 10 и стрелки 11. Узел ручного управления работает следующим образом. Перемещение ходового винта с датчиком в осевом направлении осуществляется вращением ходовой гайки через прорезные окна в поворотной втулке. При осевом перемещении стопорный винт 4 выводят из зацепления с ходовой гайкой, а стопорный винт 3 фиксирует поворотную втулку относительно неподвижного корпуса Симметричные лыски на ходовом винте и направляющие колодки в форме лепестков не позволяют проворачиваться ходовому винту вокруг своей оси, а заставляют перемещаться в осевом направлении. Перемещение ходового винта в угловом направлении (поворот) осуществляется вращением поворотной втулки относительно неподвижной втулки (корпуса) при выведенных из зацепления стопорных винтов 3 и 4. В предлагаемом узле ручного управления координатника по сравнению с известным используется более чем в 1,5 раза меньшее количество деталей, узел имеет мень-обходимых замеров. Кроме того, такая коиший осевой габарит в результате измене-струкция позволяет использовать большую
йия конструкции поворотной втулки, что«полезную длину ходового винта, а слеявляется важным при использовании коор-довательно увеличить осевое перемещение
динатника в труднодоступных местах ис-датчика при одинаковой с известным устследуемых установок для произведения не-ройством обш.ей длине ходового винта.
1068917

| название | год | авторы | номер документа |
|---|---|---|---|
| Установка для измерения трехмерного потока между лопастями вращающегося гребного винта | 1972 |
|
SU470434A1 |
| ДЕРЕВООБРАБАТЫВАЮЩИЙ НАСТОЛЬНЫЙ КОМБИНИРОВАННЫЙ СТАНОК | 1992 |
|
RU2015877C1 |
| ГУСЕНИЧНЫЙ СВАРОЧНЫЙ РОБОТ И СПОСОБ УПРАВЛЕНИЯ ТАКИМ РОБОТОМ | 2019 |
|
RU2754728C1 |
| ОПОРНО-ПОВОРОТНОЕ УСТРОЙСТВО АНТЕННЫ | 1992 |
|
RU2006110C1 |
| УСТРОЙСТВО СВЕРЛИЛЬНО-ФРЕЗЕРНОЕ УСФ | 2006 |
|
RU2309821C1 |
| Фрезерный станок | 1981 |
|
SU984714A1 |
| РАКЕТНАЯ ПУСКОВАЯ УСТАНОВКА | 2021 |
|
RU2766029C1 |
| Механизм поперечных подач шлифовального станка | 1980 |
|
SU903094A1 |
| Прибор для измерения обувных колодок | 1983 |
|
SU1136790A1 |
| АВТОМАТИЧЕСКИЙ РЕГУЛЯТОР ТОРМОЗА ДЛЯ РЕГУЛИРОВАНИЯ ЗАЗОРА МЕЖДУ ТОРМОЗНОЙ КОЛОДКОЙ И ТОРМОЗНЫМ БАРАБАНОМ ТОРМОЗНОЙ СИСТЕМЫ ТРАНСПОРТНОГО СРЕДСТВА | 2006 |
|
RU2406894C2 |
УЗЕЛ РУЧНОГО УПРАВЛЕНИЯ, содержаш.ий. коаксиально расположенные неподвижную, -вязанную с корпусом втулку и поворотную втулку, хо.човую ганку, направляющие колодки, связанные с поворотной втулкой и сооспо расположенные с ходовым впнтом с лыскамн, отличающийся тем, что, с целью упрощения конструкции, в поворотной втулке выполнены прорезные окна, ходовая гайка расположена внутри поворотной втулки, а направляющие колодки выполнены в виде ленесткдв, установленных на новоротной втулке по обеим сторонам от ходо вого винта. (Л осевого и углового перемещения -LA о: 00 со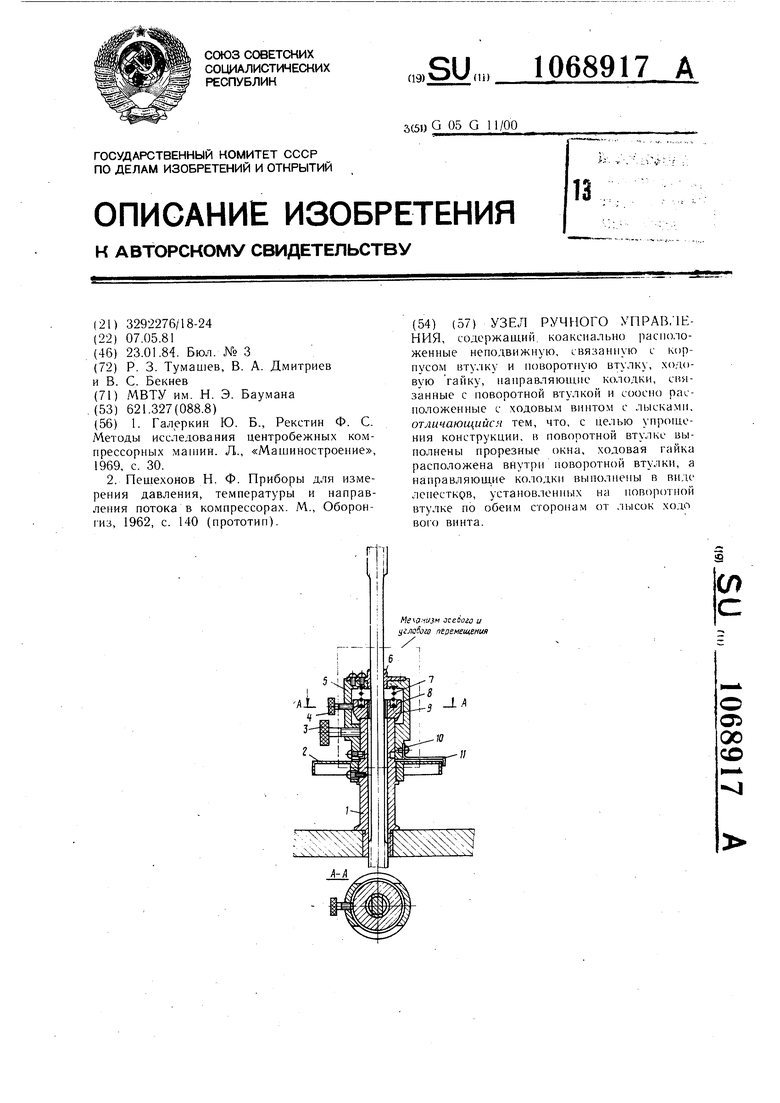
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Галеркин Ю | |||
| Б., Рекстин Ф | |||
| С | |||
| Методы исследования центробежных компрессорных машин | |||
| Л., «Машиностроение, 1969, с | |||
| Способ обработки медных солей нафтеновых кислот | 1923 |
|
SU30A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Пешехонов Н | |||
| Ф | |||
| Приборы для измерения давления, температуры и направления потока в компрессорах | |||
| М., Оборонгиз, 1962, с | |||
| Способ закалки пил | 1915 |
|
SU140A1 |
