1
Изобретение относится к области внутрицехового транспорта, в частности к подвесным грузонесущим и толкающим конвейерам.
Известны конструкции ловителей тележек, устанавливаемые на наклонных участках конвейера, содержащие механизм, реагирующий на скорость движения каретки, .механизм останова и механизм стопорения, обеспечивающий при нормальной работе конвейера свободное прохождение тележки и стопорение ее при аварийном состоянии конвейера.
Однако в известных устройствах каретка, взводящая ловитель, не задерживается им. Кроме того, отсутствует фиксация рабочих органов ловителя во взведенном состоянии, что вызывает нестабильную работу указанных ло1вителей.
Цель изобретения - повышение надежности останова каретки при реверсивной работе .конвейера. Это достигается тем, что предлагаемый ловитель выполнен в виде трехплечих рычагов, каждый из которых установлен с возможностью поворота на вертикальной оси, укрепленной на кронштейне ловителя, причем одни из плеч рычагов выполнены в виде сомкнутых и подпружиненных губок, взаимодействующих с карет ками, вторые плечи снабжены выступами для захватов кареток, а третьи взаимодействуют с механизмом стопорения.
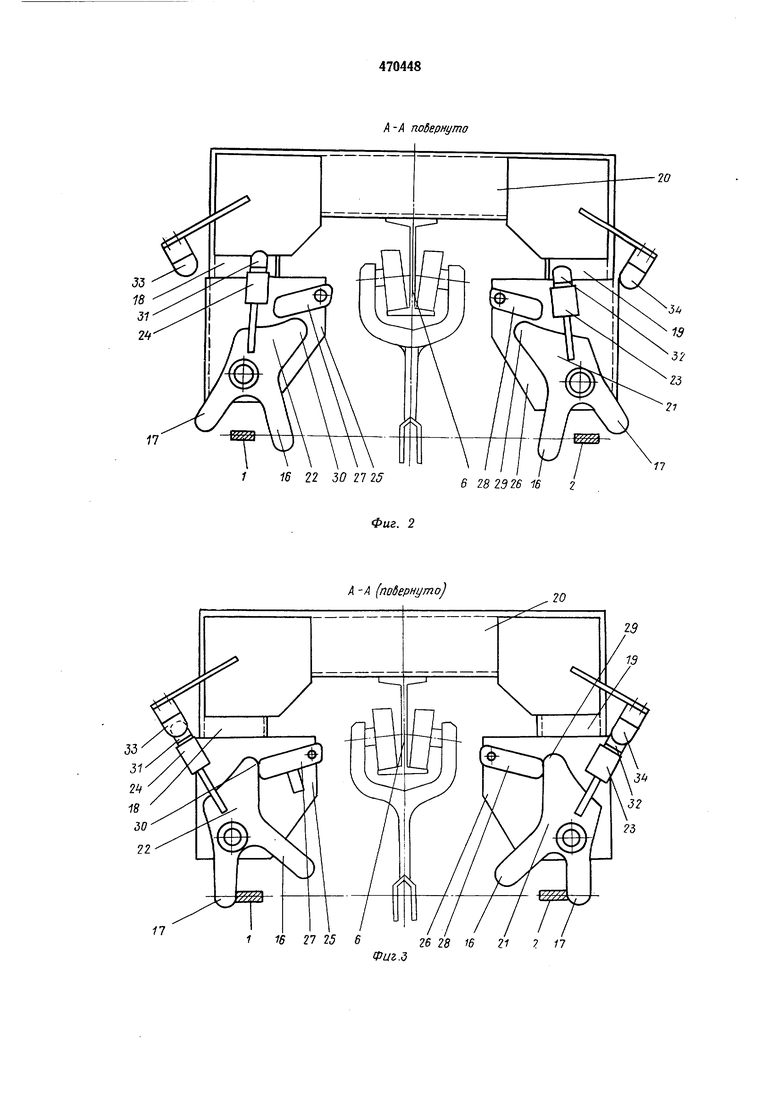
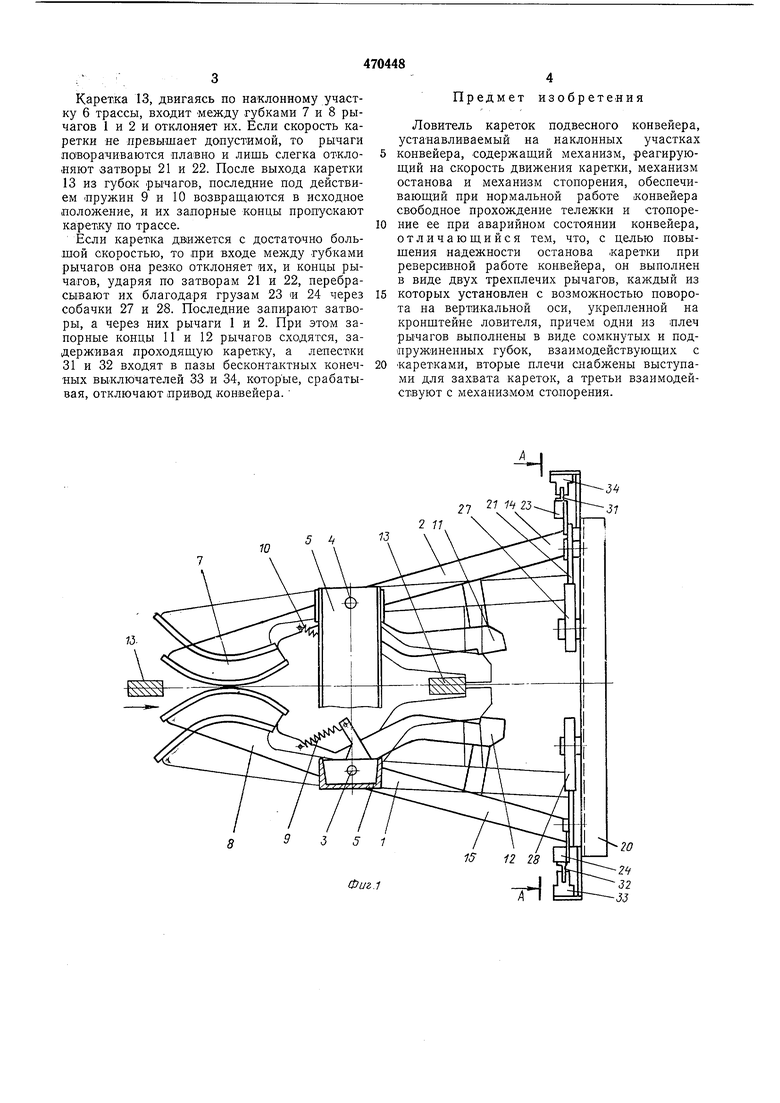
На фиг. 1 показан общий вид предлагаемого ловителя; на фиг. 2-разрез по А-А на фиг. 3-то же, затвор в закрытом положении.
Ловитель состоит из двух трехплечих рычагов 1 и 2, которые установлены с возможностью поворота на вертикальных осях 3 и 4, закрепленных на кронщтейнеБ, смонтированном на наклонном участке 6 подвесного конвейера.
Одни из плеч трехплечих рычагов 1 и 2 выполнены в виде со.мкнутых губок 7 и 8 и подлружинены пружинами 9 и 10. Вторые плечи снабжены выступами 11 и 12 для захвата кареток 13 конвейера. Третьи плечи 14 и 15
взаимодействуют с нижними плечами 16, и 17, также поворотно установленными на вертикальных частях 18 и 19 другого кронщтейна 20 затворами 21 и 22. На затворах 21 и 22 закреплены грузы 23 и 24.
На вертикальных частях 18 и 19 j poHmтейна 20 посредством пластин 25 и 26 поворотно закреплены собачки 27 и 28, взаимодействующие с верхними плечамИ 29 и 30
затворов 21 и 22.
На грузах 23 и 24 закреплены лепестк-и 31 и 32, которые взаимодействуют с конечными вьгключателями 33 и 34, закрепленными на кронштейне 20.
Ловитель работает следующим образом.
Каретка 13, двигаясь по наклонному участку 6 трассы, входит между губками 7 и 8 рычагов 1 и 2 и отклоняет их. Если скорость каретки не превышает допустимой, то рычаги поворачиваются плавно и лишь слегка отклоняют затворы 21 и 22. После выхода каретки 13 из губок рычагов, последние под действием .пружин 9 и 10 возвращаются в исходное положение, и их запорные концы пропускают каретку по трассе.
Если каретка движется с достаточно большой скоростью, то при входе между губками рычагов она резко отклоняет их, и концы рычагов, ударяя по затворам 21 и 22, перебрасывают их благодаря грузам 23 т 24 через собачки 27 и 28. Последние запирают затворы, а через них рычаги 1 и 2. При этом запорные концы 11 и 12 рычагов сходятся, задерживая проходящую каретку, а лепестки 31 и 32 входят в пазы бесконтактных конечных выключателей 33 и 34, которые, срабатывая, отключают привод конвейера.
Предмет изобретения
Ловитель кареток подвесного конвейера, устанавливаемый на наклонных участках
конвейера, содержащий механизм, реагирующий на скорость движения каретки, механизм останова и механизм стопорения, обеспечивающий при нормальной работе конвейера свободное прохождение тележки и стопорение ее при аварийном состоянии конвейера, отличающийся тем, что, с целью повыщения надежности останова каретки при реверсивной работе конвейера, он выполнен в виде двух трехплечих рычагов, каждый из
которых установлен с возможностью поворота на вертикальной оси, укрепленной на кронщтейне ловителя, причем одни из плеч рычагов выполнены в виде сомкнутых и подпружиненных губок, взаимодействующих с
каретками, вторые плечи снабжены выступами для захвата кареток, а третьи взаимодействуют с механизмом столорения.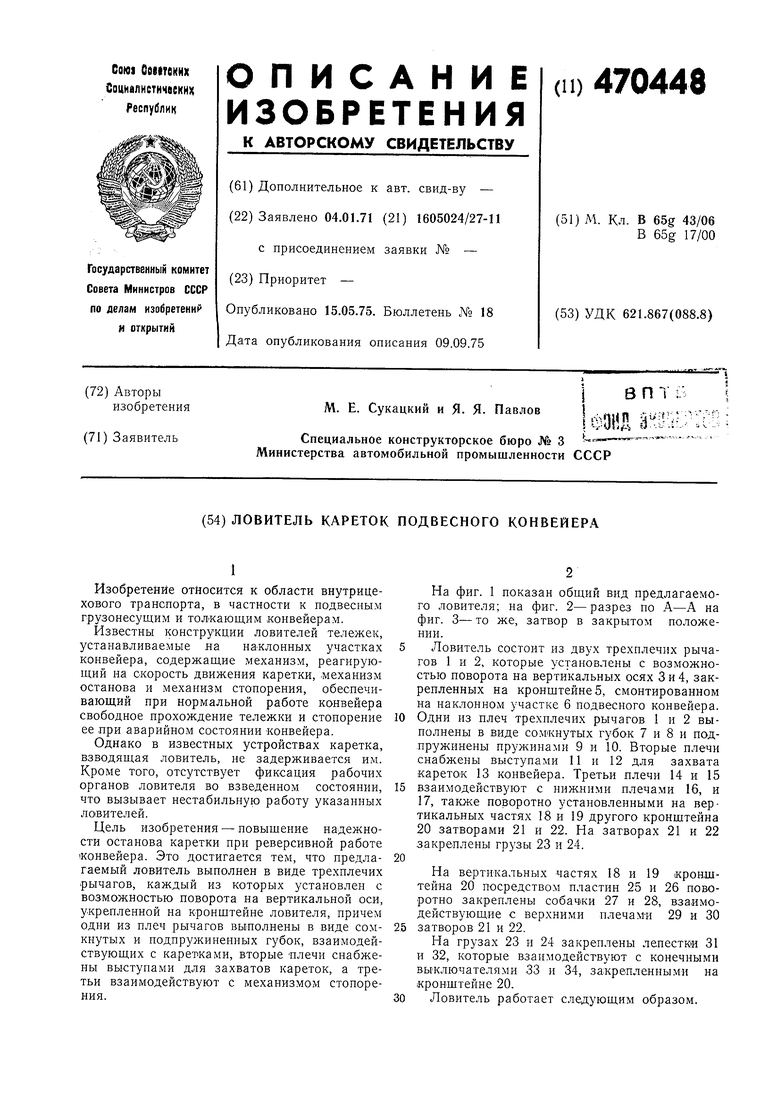
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для улавливания кареток на спуске подвесного конвейера | 1983 |
|
SU1104077A1 |
| Ловитель кареток на наклонных участках подвесного конвейера | 1983 |
|
SU1129149A1 |
| Подвеска подвесного конвейера | 1980 |
|
SU948792A1 |
| Устройство для навешивания и съема крупногабаритных изделий с грузонесущих подвесок подвесного конвейера | 1980 |
|
SU956385A1 |
| Ловитель кареток подвесного конвейера | 1981 |
|
SU1034966A1 |
| Подвесной грузонесущий конвейер | 1975 |
|
SU580147A1 |
| Ловитель | 1987 |
|
SU1419973A1 |
| Ловитель кареток подвесного конвейерапРи ОбРыВЕ ТягОВОгО ОРгАНА | 1979 |
|
SU835903A1 |
| Устройство для загрузки изделий с подвесного конвейера | 1972 |
|
SU498232A1 |
| Устройство для загрузки подвесок подвесного конвейера | 1987 |
|
SU1507695A1 |