Изобретение относится к области автоматики. Его 1можно использовать при проектировании дискретных следящих систем со взаимосвязаиными контурами уравновешивания для измерения комплексных величин переменного тока.
Известны способы устранения автоколебаний в дискретных следящих системах со взаимосвязанными контурами уравновешивания, основанные на поочередном вводе в контуры уравновешивания комиенсируюших напряжений, половина дискретного деления которых меньше чувствительности порогового устройства сигнала рассогласования.
Недостаток известных способов заключается в том, что возрастает погрешность измерения компенсатора, так как в момент равновесия составляющие сигнала рассогласования по осям могут Оказаться ,зна1чительно больше порогов чувствительности порогового устройства.
Предложенный способ отличается тем, что после третьего такта возникаюшего периодического режима формируют компенсирующие напряжения, равные половине дискретного деления, и одновременно вводят их в следящие системы со взаимосвязанными контурами уравновешивания.
отсчета измеряемого параметра, а та1сже упростить конструкцию дискретных следящих систем.
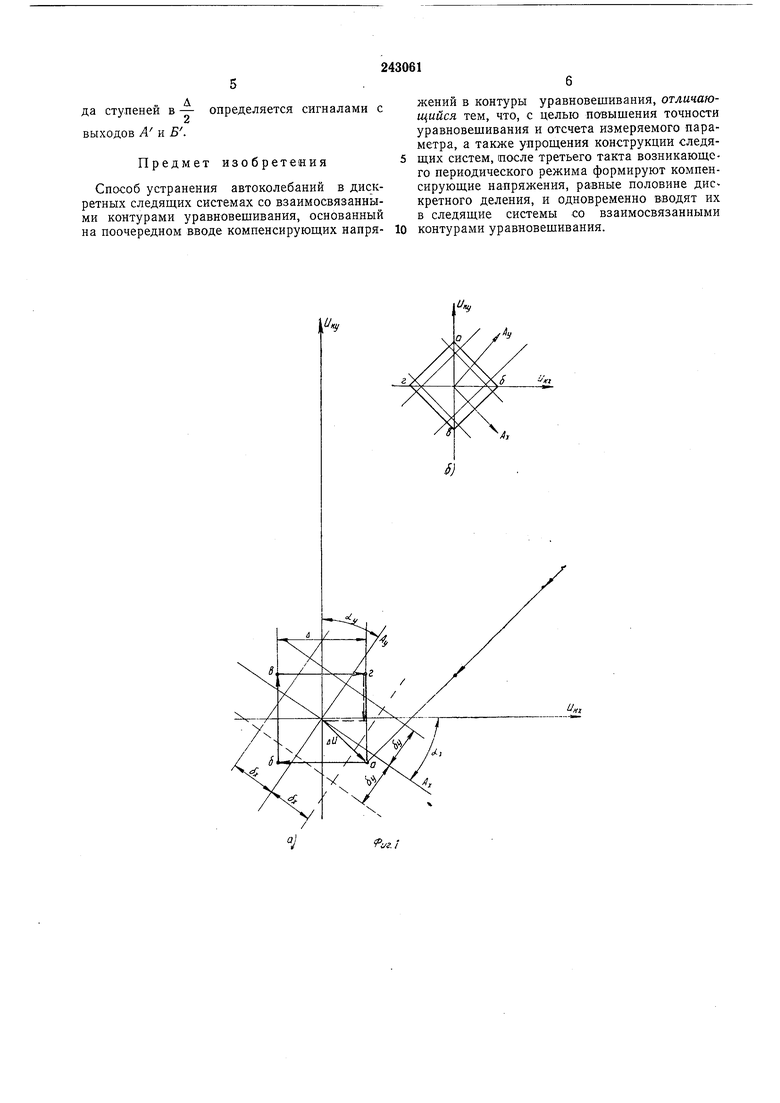
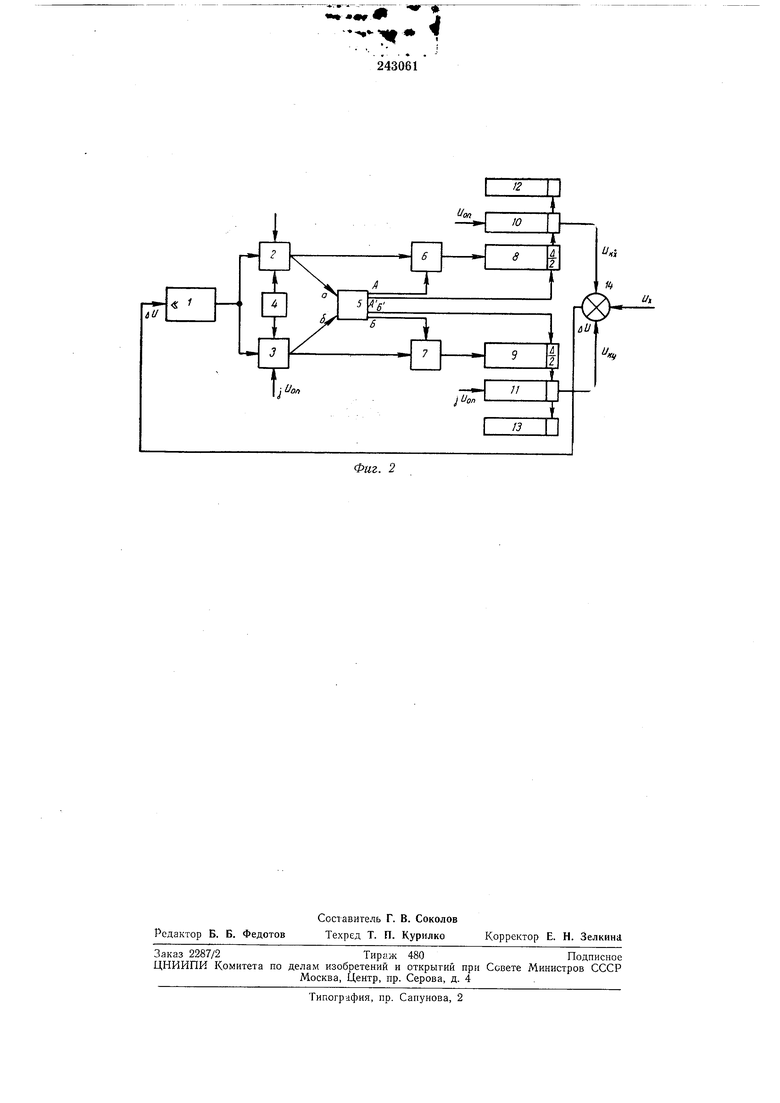
На фиг. 1 представлена диаграмма, поясняющая возникновение и устранение периодического режима, на фиг. 2 - блок-схема автоматического компенсатора.
На диаграмме: Д - величина дискретной ступени компенсирующего напряжения; кх ку-система координат компенсирующих напряжений; А, Ау-векторы фазовой чувствительности каналов уравновешивания; бд., бу -значения чувствительности пороговых устройств каналов уравновешивания; At/ - сигнал рассогласования.
Компенсатор содержит усилитель сигнала рассогласования 1, :фазочувствительные дискретные элементы , генератор тактовых импульсов 4, логическое устройство 5, исключающее периодические режимы, логические устройства подекадного уравновешивания 6 и 7, счетчики S и 9, декаду компенсирующих напряжений 10 и 11, цифровые отсчетные устройства 12 и 13, схему сравнения 14, (/оп - опорное напряжение первого канала, /оп - опорное напряжение второго канала уравновешивания, сдвинутое относительно первого на 90°.
вых устройств возникает периодический процесс (автоколебания), лредставленный на фиг. la.
Например, если конец вектора сигнала рассогласования Afy оказался в точке «а, пороговое устройство канала «л; включено (так как проекция вектора At/ на ось фазовой чувствительности Aj .превышает чувствительность порогового устройства), а каиала «у - отключено. При поступлении тактового импульса вводится одна ступень компенсирующего напряжения по оси «х, и конец вектора сигнала рассогласования переходит в точку «б. В этой точке пороговое устройство канала «л: отключается и включается пороговое устройство канала «у. При поступлении тактового импульса выводится ступень компенсирующего напряжения по оси «у. В точке «в включается пороговое устройство по оси «л; и отключается пороговое устройство по оси «у. Но теперь при поступлении тактового импульса по оси «х уже выводится ступень .компенсирующего напряжения, так как знак сигнала рассогласования изменился на 180°. Таким образом, конец разностного напряжения никогда не попадает в область нечувствительности - возникает периодический процесс. Чтобы его устранить, например, увеличивают область нечувствительности за счет увеличения порогов чувствительности б и 8у. Однако при этом значительно возрастает погрешность измерения компенсатора, так как в момент равновесия составляющие сигнала рассогласования по осям координат могут оказаться значительно больше б и б, (например, если вектор сигнала рассогласования располагается вблизи одной из вершин области нечувствительности).
При возникновении данного периодического режима можно осуществить ввод по одной из составляющих ступени в половину дискретного деления, и при этом периодический процесс завершится. Однако погрешности измерения по составляющим окажутся большими (больше половины дискретного деления).
Предлагаемый авторами способ устранения периодических режимов заключается в том, что, если компенсирующие напряжения вводятся поочередно по осям «л; и «у, то после третьего такта по обеим осям одновременно вводятся компенсирующие напряжения, соответствующие половине дискретного деления. Например, если цикл начался в точке «а, то после третьего такта (конец вектора AL/ расположен в точке «г) вводятся компенсирующие напряжения, показанные на фиг. 1а штрихом. При этом конец векто ра разностного напряжения попадает в область нечувствительности, и автоколебания прекращаются. Область нечувствительности можно уменьшить, взяв б и б, меньще половины дискретного деления, в связи с чем точность компенсатора возрастает (погрешность по составляющим меньше половины дискретного деления).
В следящих дискретных системах возможны и другие периодические режимы вблизи состояния равновесия, однако они возникают при гораздо большей степени взаимосвязи контуров уравновешивания, чем рассматриваемый цикл, и поэтому их влияние на нормальную работу автокомпенсаторов легко устранимо.
Так, если при 6 6 -периодический
i
режим фиг. 1а возникает При нулевых углах взаимосвязи tty, то периодический режим фиг. 16 возникает при углах сс и а., больших 30°.
Другие же периодические режимы возникают при еще больших углах сс. и Оу. Поэтому основное внимание и должно быть уделено устранению периодического режима фиг. 1а. Остальные же режимы устраняются, если аи . Периодический режим фиг. 1а может начаться в любой из точек (а, 6, в, г) и поэтому шаги в половину дискретного деления должны быть обоих знаков: путем либо увеличения, либо уменьшения компенсирующего напряжения. Соответственно блоки уравновешивающего параметра должны иметь две ступени в половину дискретного деления, предусматривающие увеличение или уменьшение (т. е. предусматривающие двусторонний подход) , либо одну ступень уравновешивающего параметра и логическое устройство, определяющее направление изменения уравновешивающего параметра (т. е. односторонний подход).
Предпочтение следует отдать второму варианту, так как в этом случае упрощается конструкция следящей дискретной системы уравновешивания (блока компенсации и логического устройства) и отсчетного устройства (за счет упрощения системы дешифратора).
Согласно фиг. 2 измеряемое напряжение f/ сравнивается с компенсирующими U и . Сигнал рассогласования усиливается и попадает на фазочувствительные дискретные элементы 2 и , которые управляют логическими устройствами подекадного уравновешивания 5 и 7 и логическим устройством 5, устраняющим периодические режимы. Логическое устройство состоит из счетчика на три и простых логических элементов И, ИЛИ и имеет два импульсных входа а и б Е четыре выхода А, В, А и В . Оно работает таким 0|б;разам, что при одновременном поступлении на входы а-в импульсов счетчик остается в нулевом полол ении, при поочередном поступлении импульсов на входы а и б он работает в режиме счета и при любом нарушении очередности поступления импульсов переходит в нулевое положение, т. е. работает в режиме счета только при возникновении периодического режима.
да ступеней в - определяется сигналами с выходов Л и Б .
Предмет изобретения
Способ устранения автоколебаний в дискретных следящих системах со взаимосвязанными контурами уравновешивания, основанный на поочередном вводе компенсирующих напряжений в контуры уравновешивания, отличающийся тем, что, с целью повышения точности уравновешивания и отсчета измеряемого параметра, а также упрощения конструкции следяш,их систем, после третьего такта возникающего периодического режима формируют компенсирующие напряжения, равные половине дискретного деления, и одновременно вводят их в следящие системы со взаимосвязанными контурами уравновешивания.

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ уравновешивания в следящих полярнокоординатных автокомпенсаторах переменного тока | 1978 |
|
SU739418A1 |
| Цифровой полярно-координатный автокомпенсатор | 1978 |
|
SU706787A1 |
| РЕЛЕЙНОЕ САМОНАСТРАИВАЮЩЕЕСЯ УСТРОЙСТВО | 1969 |
|
SU251045A1 |
| Способ цифровой фильтрации периодических помех в тензометрических весах и тензометрическое устройство с цифровой фильтрацией периодических помех | 1980 |
|
SU932256A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2020724C1 |
| Способ уравновешивания нулевых измерительных цепей переменного тока с двумя уравновешивающими органами | 1972 |
|
SU470747A1 |
| Цифровой полярно-координатный автокомпенсатор | 1978 |
|
SU779889A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ АМПЛИТУД ИМПУЛЬСОВ | 1971 |
|
SU291154A1 |
| Аналого-цифровой интегратор | 1978 |
|
SU805345A1 |
| Электрогидравлический следящий привод | 1985 |
|
SU1269092A1 |
«««Г-..4(1
W
. 2
