Предлагаемый поворотный стол предназначается для изучения и испытания приборов, автоматически стабилизующих курс самолета, корабля, повозки и других объектов, воспроизвести которые в лабораторных условиях не представляется необходимым или возможным в силу их размеров, сложности устройства и т.п.
Поворотный стол, заменяя собой самолет, корабль и т.д., имеет детали, кинематически связанные так, чтобы функциональная зависимость между изменяющимися величинами элементов стола была та же, что и между соответствующими действительными элементами стабилизуемого объекта, например, между углами отклонения корабля от заданного курса и углами поворота руля, для возвращения корабля на заданный курс.
На чертеже изображена схема устройства поворотного стола.
Роль корабля, например, выполняет платформа 1 с осью 34, приводимая по вращение червячной передачей 2 и шестернями 4 и 3 от вала 5 диференциала 33, шестерня которого в свою очередь получает вращение через червячные передачи 6-8 и 7-9 от реверсивных электродвигателей 10 и 11, непрерывно вращающихся в противоположные стороны. Так как ось бегунов диференциала 33 закреплена на валу 5, угловая скорость этого вала пропорциональна разности угловых скоростей двигателей.
"Руль корабля" выполняет движок 19, перемещающийся при помощи винта 20, вращаемого электродвигателем 21, который при отклонении платформы 1 от нормального положения, характеризующего направление "курса корабля", включается испытуемым стабилизатором, установленным на платформе и работающим, как и в действительных условиях. Реостаты 13, 14, 15, 16, 17 и 18 служат для изменения и регулирования чисел оборотов электродвигателей 10 и 11 и подбора передаточного отношения от двигателя 21 к платформе.
Для осуществления обратной связи от "руля" 19 к испытуемому стабилизатору необходимо передать вращение двигателя 21 соответствующим элементом стабилизатора, установленного на столе 1. Это достигается посредством шестеренчатой передачи 22-23, приводящей в действие двойной диференциал 30, первая пара бегунов которого вращается от двигателя 21, ось 31 второй пары и шестерня 35 закреплены, а верхняя главная шестерня 32 жестко связана с платформой 1, так что выходящая на платформу ось 34 будет поворачиваться в соответствии со смещением движка ("руля") 19.
Искомая зависимость между углом отклонения "корабля от заданного курса" (угол поворота платформы 1) и углом отклонения "руля от диаметральной плоскости корабля" (смещение движка 21) может быть записана в виде кривой регистрирующим прибором, барабан 28 которого приводится во вращение диференциалом 33 при помощи шестерен 4 и 29, а каретка 26 с пишущим приспособлением 27 перемещается двигателем 21 посредством конической передачи 24-25.
| название | год | авторы | номер документа |
|---|---|---|---|
| Тренажер для рулевых вертикальщиков | 1939 |
|
SU60187A1 |
| САМОЛЕТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ С НЕСУЩИМ ВИНТОМ СО СВОРАЧИВАЮЩИМИСЯ УБИРАЕМЫМИ ЛОПАСТЯМИ | 2019 |
|
RU2727787C1 |
| Прибор для упражнения в стрельбе по морским целям | 1930 |
|
SU25074A1 |
| БЕСПИЛОТНЫЙ ТЯЖЕЛЫЙ ЭЛЕКТРОКОНВЕРТОПЛАН | 2013 |
|
RU2532672C1 |
| ОБУЧАЮЩЕЕ УСТРОЙСТВО | 1970 |
|
SU258746A1 |
| Вибрационная машина для возбуждения искусственных колебаний в мостовых фермах | 1929 |
|
SU30188A1 |
| Автоматический регулятор | 1937 |
|
SU58790A1 |
| Магнитометр | 1937 |
|
SU52951A1 |
| Система дозаправки в воздухе с автоматическим управлением и автостабилизируемым заправочным устройством | 2023 |
|
RU2809164C1 |
| ПОВОРОТНАЯ УСТАНОВКА | 1968 |
|
SU231181A1 |
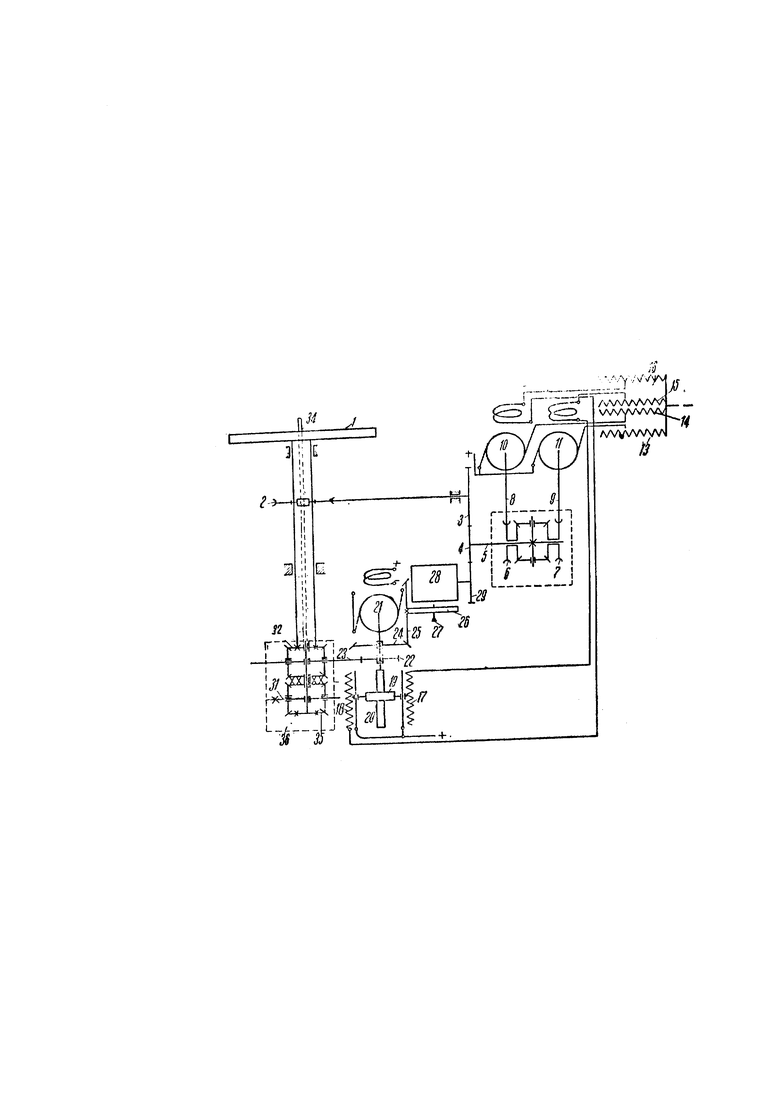
Поворотный стол для испытания приборов, например, автоматических стабилизаторов курса, с применением диференциальных механизмов и регистрирующих приборов, отличающийся тем, что реверсивный мотор 21 перемещает движок 19 реостата 17-18, изменяя число оборотов электромоторов 10 и 11 диференциала 33 поворотного механизма с целью согласования направления вращательного движения стола с работой испытуемого прибора.
