Изобретение касается тренировочных приборов для приобретения практических навыков по управлению вертикальным рулем пойводной лодки В стенах учебного за1В;едения. Оригинальность тренажера, согласно изобретению, заключается в том, что для изменения быстроты «аправления поворота площади (мостика рубки подводной лодки) применена управляемая сателлитная передача, включенная в систему управляющих поворотом площадки фрикционных передач таким обраэом, что произвольно вносимое Смещение площадки синхронно отображает изменениое положение площадки на приборах управления.
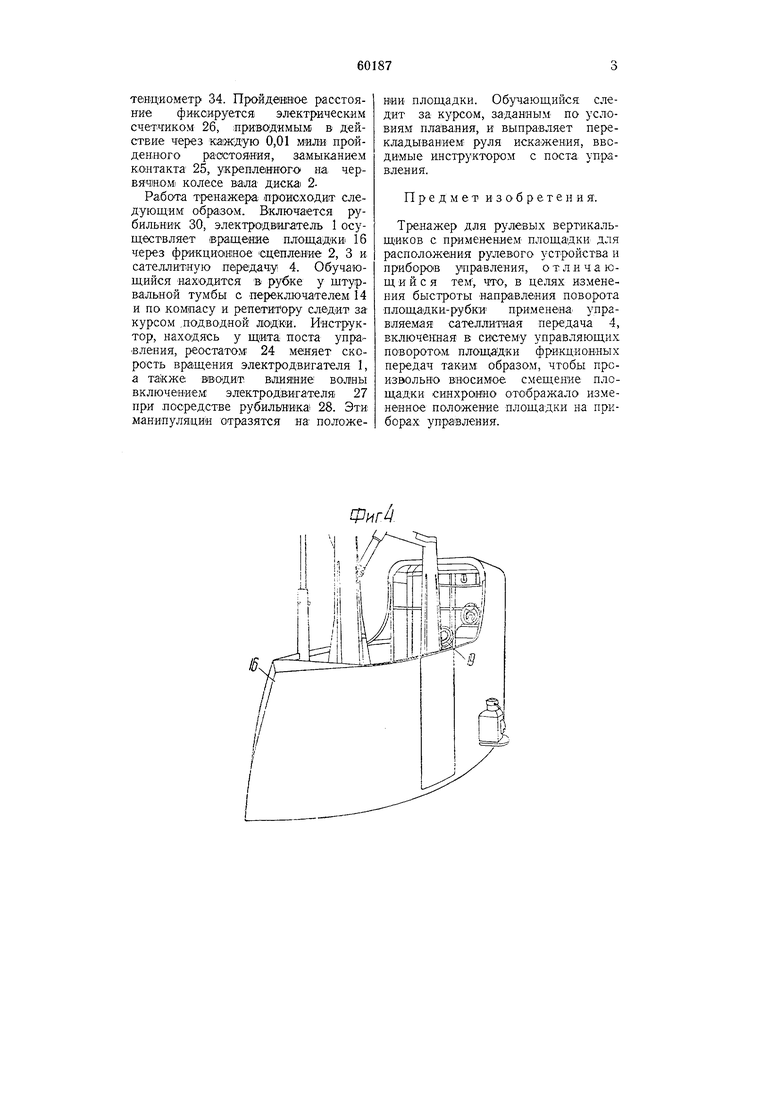
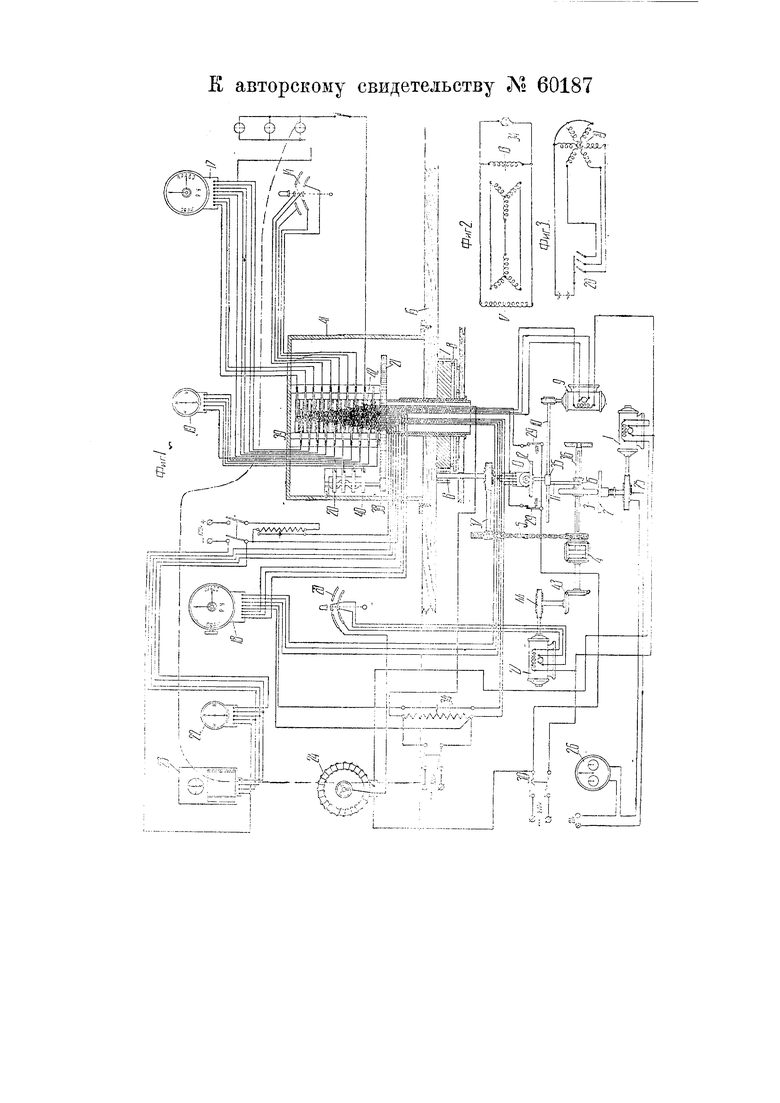
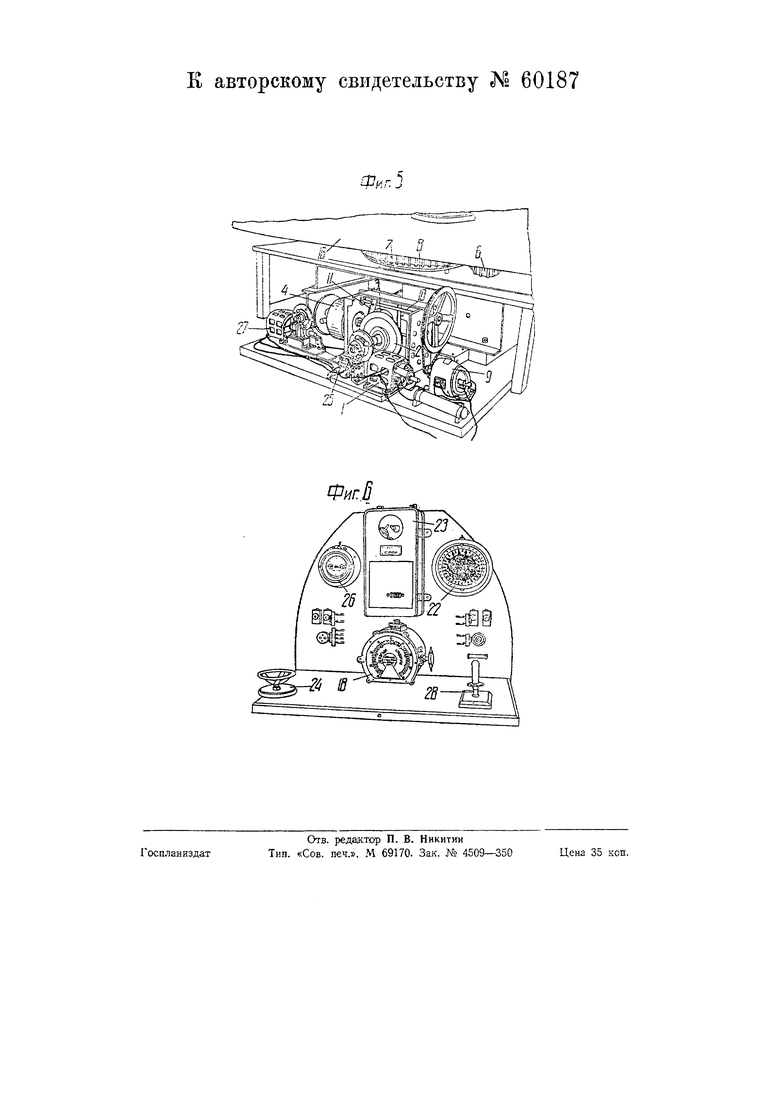
На фиг. 1 чертежа изображена схема Взаимодействия узлов механизма тренажера, электрического управления вертикальным рулем и включения приборов; на фиг. 2 и 3 - схемы электрического включения приборов при их работе на постоянном и переменном токе; на фиг. 4 - мостик (площа1дка) подвояиой лодки с бутафорской рубкой на нем; на фиг. 5 - астрегат для Вращения мостика; на фиг. 6 - вид спереди поста упржления площадкой.
Пост управления площадкой дает возможность следить за курсом, пройденным расстоянием пути, производить сбивание с курса и вводить «течения, «волны. Обучающийся, находясь на площадке у штурвала вертикального руля, приобретает навык по управлению рулем, держанию заданного курса, ориентируясь по компасу.
Тренажер предназначен разрешать следующие задачи: передачу площадке (мостику рубки) влияния вертикального руля, влияния скорости корабля, его инерции и волны на циркуляцию коробля, приближенно к действительным условиям плавания.
Тренажер в основном составляют три узла: площадка (мостик рубки) с приводом вертикального руля и с приборами для указания курса корабля и положения руля (фиг. 4 и 1), аггрегат для сообщения площадке вращательного движения (фиг. 5 и 1) и nOiCT управления площадкой, расположенный вне ее и заведываемый инструктором (фиг. 6 и 1).
Площадка 16 оснащена тумбой щтурвала с переключателем 14, прибором перекладывания руля (аксиометром) 17, магнитным компасом для указания курса, репетитором 19 для той же цели, ра-ботающим синхронно с репетитором 22, установленным: «а тосте управлеиия площадкой. Переключатель 14 включает в действие электрический двигатель 9, приводящий через червячную передачу ВО вращение винтовой залик 10, сообщающий поступательно-возвратные движения вдоль его гай- I ке 35. С этой гайкой жестко сопряжены стержень, несущий гребек- j ку 12, и поводок 11 вту.ткн 15 фрикционного катка 3. Фрикционный каток 3 насажен на зал 36 с возможностью вращения вместе с ним И .перемещения вдоль его. Каток 3, находясь во фрикцнонном сцеплении с диском 2, приводимым во вращение через червячную передачу электродвигателем 1, дает возможность постепенного перехода от одной величины передачи к другой и изменения направления вращения. Каток 3, насаженный на вал 36 сателлитной передачи 4, передвигаемый параллельно плоскости диска 2 при перекладывании переключателя 14 «лево руля, «право руля, будет занимать соответственно перекладыванию место на диске 2. Если каток 3 займет на диске 2 среднее положение, скорость вращения егобудет равна нулю, что будет соответствовать нулевому положению вертикального- руля. Таким образом при носредстве фрикционной передачи 2 и 3 и сателлитной передачи 4 площадке 16 может быть сообщено вращение по часовой и против часозой стрелки и с переменной скоростью. Эта. передача вращения площадке осуществляется при носредстве цепи Галля 5, перекинутой через цепные колеса валов 36 и 37, и червячной гнестерни 6 червячной передачи, находящейся в сцеплении с шестерней 7, несущей пл&щадку 16. Шестерня 7 опирается на щгфиковый подщннник 8. Определение курса и его изменений производится по репетиторам один из которых 19 установлен на площадке 16 (мостике рубки), авто рой 22 - на щите поста управления фиг. 6 и 1). Бее приборы приводятя в действие переключателями 39 20. Переключатель 20, выполненный в виде валика с кулачковыми контаками, взаимодействующими со щетками 40 рамки, укрепленной к ту.мбе 41, производит замыкание цепей репетиторов 19 к 22 нри поворачивании площадки с гиестерней 38, сцепленной с непо-движным зубчатым колесом 21. На колесе 21 монтирован барабан 42, но которОМу скользят щетки 39 электрических цепей тренажера. С означенным барабаном и щетками сопряжены; курсогра:ф 23, регистрирующий успеваемость обучающегося управлению рулем; приборы 17 и 18, фиксирующие положение руля; переключатель 14, управляющий перекладкой руля, и рубильник 28 электродвигателя 27, осуществляющего создание влияния волны на площадку через у помэнутую сателлитную передачу 4, связанную с электродвигателем: 27 шестеренчатой и червячной передачами 43 и 44. Инерция при циркуляции корабля осуществляется мертвым ходом псводка II в шейке втулки 15 катка 3, не допускающим оставаться последнему на диске 2 в нулевом положении. Электродвигатель 1 включается в действие рубильником 30. Его скорость регулируется реостатом 24, включенны.м последовательно с яксрем. Электродвигатель 9 включается в работу также при посредстве рубильника 30, в цепь которого введены концевые выключатели 29, приводимые в действие концами гребенки 12. Электродвигатель 27 питается такi же через рубильник 30, но его ре1 вере осуществляется рубильниI ком 28. Синхронный электродвигатель 13 - датчик сцеплен своим зубчатым колесом с гребенкой 12, благодаря чему при перекладывании руля осуществляется синхронно-е поворачивание указателей 17 и 18 на 1 один и тот же угол. Питание обмотки статоров синхронных двигателей дается через пстевциометр 34. Пройденное расстояние фиксируется электрическим счетчиком 26, яркводимым; в действие через каЖДую 0,01 мили пройденного расстояния, замыканием контакта 25, укрепленного на червячиом колесе вала диска 2Работа тренажера происходит следующим образом. Включается рубильник 30, электродвигатель 1 осуществляет «вращение плoщaдlкиi 16 через фрикцио1Н1Ное сцепление 2, 3 и. сателлитную передачу 4. Обучающийся яаходится в рубке у щтурвальной тумбы с пе-реключятелем 4 и по компасу и репетит ору следит за курсом .подводной лодки. Инструктор, находясь у щита поста управления, реостатом 24 меняет скорость вращения электродвигателя 1, а также вводит влияние волны включением электродвигателя; 27 при посредстве рубильника 28. Эти манипуляции отразятся на положении площадки. Обучающийся; следит за курсОМ, заданным по условиям плавания, и выправляет перекладыванием руля искажения, вводимые инструктором с поста управления.
Предмет изобретения.
Тренажер для рулевых вертикальщиков с применением площадки для расположения рулевого устройства и приборов управления, отличающийся тем , что, в целях изменения быстроты «аправлеиия поворота площадки-рубки- применена управляемая сателлитная передача 4, включенная в систему управляющих поворотом площадки фрикционных передач таким образом, чтобы произвольно вносимое смещение площадки синхронно отображало измененное положение площадки на приборах управления.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРЕНАЖЕР ДЛЯ ОБУЧЕНИЯ ВОЖДЕНИЮ ВОЕННЫХ ГУСЕНИЧНЫХ МАШИН С РУЛЕВЫМ УПРАВЛЕНИЕМ | 2013 |
|
RU2542694C1 |
| Тренажерный комплекс для подготовки судоводителей | 2017 |
|
RU2657708C1 |
| Аудиторный тренажер рулевого | 1972 |
|
SU578650A1 |
| Способ подготовки летного состава к аварийному покиданию летательного аппарата и устройство его реализующее | 2024 |
|
RU2832486C1 |
| НАВИГАЦИОННЫЙ ТРЕНАЖЁР | 2023 |
|
RU2838905C2 |
| Тренажер водителя транспортного средства | 1986 |
|
SU1387031A1 |
| ТРЕНАЖЕРНЫЙ КОМПЛЕКС ДЛЯ ПОДГОТОВКИ ЭКИПАЖЕЙ КОРАБЛЕЙ | 2007 |
|
RU2340950C1 |
| АВТОМАТИЗИРОВАННЫЙ ТРЕНАЖЕРНЫЙ КОМПЛЕКС ТРАНСПОРТНОГО СРЕДСТВА | 2008 |
|
RU2398285C2 |
| БОРТОВОЙ ТРЕНАЖЕР ВОЖДЕНИЯ ГУСЕНИЧНОЙ МАШИНЫ | 2010 |
|
RU2433483C1 |
| ТРЕНАЖЕР МЕХАНИКА-ВОДИТЕЛЯ | 2023 |
|
RU2828735C1 |
15ФигА
LJ
Фиг.Б
Фиг.
