1
Изобретение относится к очувствленным промышленным роботам.
Известны очувствленные роботы, управляемые от электронной вычислительной машины, снабженные захватом и искусственными органами зрения в виде системы чувствительных элементов, образуюш,их информационную поверхность. Недостатком известных очувствленных роботов является сложность алгоритмов управления при работе с подвижными объектами, а также то обстоятельство, что их конструкция не предусматривает запоминание и хранение информации о форме и положениях объектов работы робота и траекториях их перемешений. Для этой цели обычно непроизводительно используется оперативная намять унравляюшей ЭВМ.
Для унрошения алгоритмов управления роботом при работе с подвижными объектами и уменьшения объема используемой памяти управляющей ЭВМ информационная поверхность робота выполнена на запоминающихся элементах для хранения и стирания информации о форме и положениях объектов работы робота и траекториях их перемещения, а захват робота снабжен щупом, взаимодействующим с информационной поверхностью.
Кроме того, для обеспечения возможности моделирования обстановки в зоне работы робота он снабжен контактным караидащом.
активно воздействующим на элементы информационной поверхности. Дополнительно для обеспечения возможности супервизорного управления робот снабжен экраном, связанным электрически с информационной поверхностью.
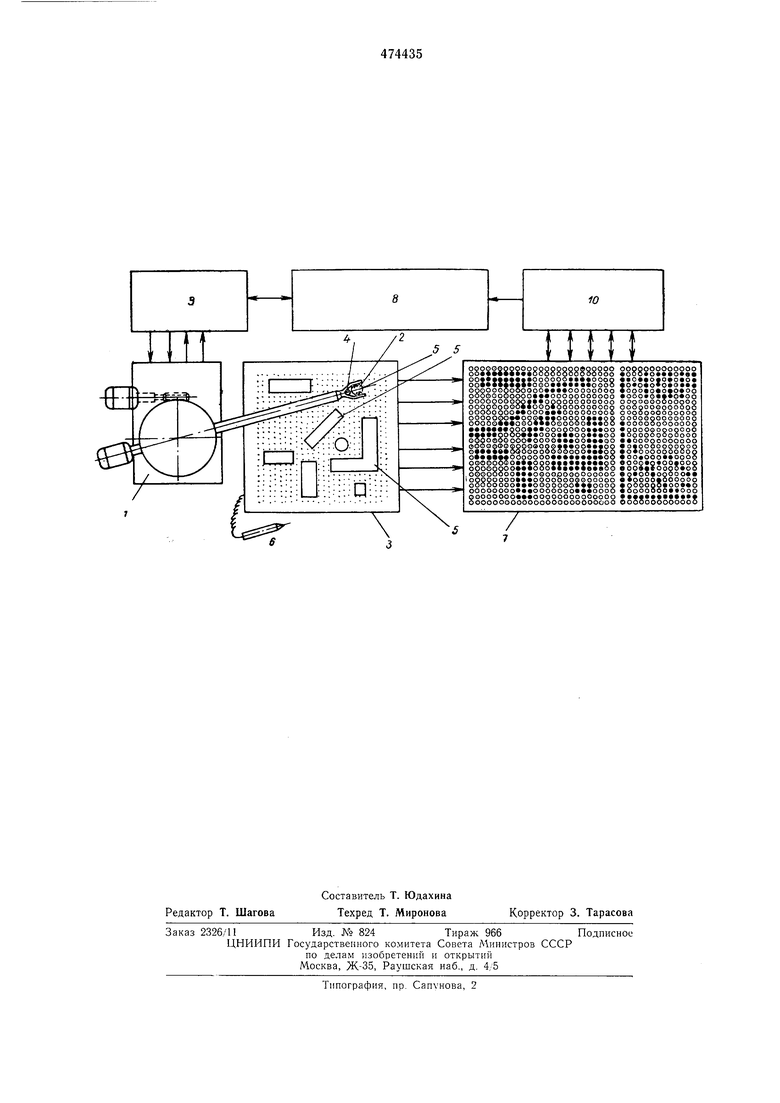
На чертеже дана схема предлагаемого очувствленного робота.
Робот имеет механическую руку 1, например, с двумя степенями свободы, захват 2, информационную поверхность 3 с системой запоминающих элементов, щуп 4, установленный на захвате и взаимодействующий с информационной поверхностью, объекты 5
работы робота, специальный «карандаш 6 для нанесения обстановки на информационную поверхность, экран 7 для отображения обстановки на информационной поверхности, управляющую ЭВМ 8, устройства 9 и 10 сопряжения ЭВМ соответственно с механической рукой и экраном.
Информация о распололчении объектов 5 и их конфигурации (обстановка в рабочем пространстве работы робота) фиксируется запоминающими элементами информационной поверхности 3, отображается на экране 7, считывается с экрана с помощью устройств 10 сопряжения и обрабатывается управляющей машиной 8. Помимо физических объектов,
для нанесения обстановки на информационной поверхности может использоваться специальный «карандаш 6. Между ЭВМ и механической рукой 1 имеется двусторонняя связь: от ЭВМ к приводам руки через устройства 9 сопряжения передаются управляющие воздействия, а с датчика положения приводов (на схеме не показаны) в ЭВМ поступает информация о положении приводов. Кроме этого, захват 2 механической руки снабжен щупом 4, взаимодействующим с информационной поверхностью, поэтому поступающая в ЭВМ информация об обстановке на информационной поверхности содержит также данные о фактическом положении захвата робота.
Таким образом, в ЭВМ поступают информации о расположении и конфигурации объектов на информационной поверхности, о фактическом расположении захвата руки и о положении приводов руки.
В соответствии с поставленной задачей, принятым алгоритмом управления и при использовании перечисленной выше информации ЭВМ вырабатывает управляющие воздействия на приводы механической руки. При этом механическая рука осуществляет целесообразные действия и решает поставленную двигательную задачу. Следует отметить, что экран не является обязательным узлом предлагаемой конструкции. Информационная поверхность может быть непосредственно связана с ЭВМ через устройства сопряжения. Однако наличие экрана существенно расширяет функциональные возможности очувствленного робота. Он является необходимым элементом при супервизорном дистанционном управлении роботом. В этом случае управляющая ЭВМ и экран удалены от зоны работы механической руки, а оператор, сидя за пультом управления ЭВМ и наблюдая на экране обстановку в зоне работы руки, в любой момент времени может вмешаться в процесс реализации движений; а также ставить новые задачи роботу и программным образом моделировать изменения обстановки на информационной поверхности. Необходимость в последнем, как правило, возникает при отработке новых алгоритмов управления. Кроме того, экран может быть использован в качестве
быстродействующего выводного устройства. При наличии соответствующего математического обеспечения на экран можно выводить различные тексты, графики и результаты расчетов характеристик работы очувствленного
робота. На чертеже правая зона экрана 7 иллюстрирует указанные возможности.
Предмет изобретения
1.Очувствленный робот, управляемый от электронной вычислительной машины, снабженный захватом и искусственными органами зрения в виде системы чувствительных элементов, образующих информационную поверхность, на которую устанавливают объекты работы, отличающийся тем, что, с целью упрощения алгоритмов управления роботом при работе с подвижными объектами и
уменьшения объема используемой памяти управляющей электронной вычислительной машины, информационная поверхность робота выполнена на запоминающих элементах для хранения и стирания информации о форме и
положениях объектов работы робота и траекториях их перемещений, а захват робота снабжен щупом, взаимодействующим с информационной поверхностью.
2.Робот по п. 1, отличающийся тем, что для обеспечения возможности моделирования обстановки Б зоне работы робота, он снабжен контактным карандашом, активно воздействующим на элементы информационной поверхности.
3. Робот по п. 1, отличающийся тем, что, с целью обеспечения возможности супервизорного управления, он снабжен экраном, связанным электрически с информационной поверхностью.
10
5 5
OQOOOOQQQOOpOQOpOQO QOQOO
28 82§S2282SS OO««M vi««oooooooooaOooo
OOfOOOOOO ««OOOO
:IO «OfO«IO«0«
oo i ««i ooo«« ««««oooo O«O4O O O «« оооооо5оооооо « «оооооооо ooo«o«o o«oo
OOOC OOQOOOO OOOOOOOOOOO OOOOOOOOOOf OOOOOOOOOOOO ooooooooooooo
oooooooooeioooioooooooooo ooooooooooooo
ОООООООО ФООО9в ООООООООо ooooooooooooo OOOOOQO «OOQt««OOOQO ««00 ooooooooooooo QOOOOv9 OOO« OOOOOOi««OO oooooooooooo OOOf OOOOOOO« «00 gooooooooooo
ООООФ« ООО«« ОО«« ОО oooooooooooo
OQQOOOOOOO OOOO OO «OO ooooooooooo
§OOOQ O0pQOOOQO 99OO« «or
OfOOOOOOOOOO
0 5§OGO of 0 0000000000j 0 ,
dooooo« « « o
o «««r
; OOQ g«oOfOOO
ooooc ooifloogo oo ooooc - --gooo
oo oooopooooooooc ooooc
,iOOOOOO
o oooooeo , ioooooooaeooooo
обоооО ооо о
O OOOOOCX)
iOOOOOCX)fOOOQ
oooooooo ««ooooooo« «ooo6 Ooooooot ooo
oooooooo oooooooooooooo
0088000000000 oooooooooooooooooooooocoo
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения координат центра тяжести изображения | 1988 |
|
SU1543430A1 |
| Устройство для контроля параметров | 1986 |
|
SU1352506A1 |
| МАНИПУЛЯТОР С ОСЯЗАТЕЛЬНЫМ ОЧУВСТВЛЕНИЕМ | 1969 |
|
SU234763A1 |
| Устройство для формирования сигнала управления очувствленным роботом | 1975 |
|
SU536956A1 |
| Система взаимодействия человек-робот на основе смешанной реальности | 2022 |
|
RU2813444C1 |
| Способ локальной защиты объекта от пожара и устройство для его реализации, способ создания быстровозводимой преграды из быстротвердеющей пены и мобильный робот для создания огнезащитной преграды из быстротвердеющей пены | 2018 |
|
RU2686421C1 |
| Сенсорная система сварочного робота | 1983 |
|
SU1138271A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ АВТОНОМНЫМ РОБОТОМ | 2008 |
|
RU2424105C2 |
| Устройство для формирования сигнала управления промышленным роботом | 1977 |
|
SU683900A1 |
| Многофункциональный робототехнический комплекс для мониторинга технического состояния, окружающего пространства и проведения технического обслуживания крупногабаритного объекта в сооружении | 2021 |
|
RU2776474C1 |