Манипуляторы с осязательным очувствлением, содержащие задающую и исполнительную руки и сервоприводы, отслеживающие пространственное положение кисти оператора, и очувствленные по нагрузке, воспринимаемой механизмом схвата, известны.
Однако оператор испытывает значительные иаразитные нагрузки. Это связано с инерционностью звеньев задающего механизма, перемещаемого оператором, и соответствующих двигателей, роторы которых ему приходится вращать через повышающие редукторы. Кроме того, оператор должен преодолевать трение в элементах передачи.
Паразитные нагрузки существенно искажают информацию о величине рабочего усилия, действующего на механизм схвата, ухудшают динамические качества манипулятора и приводят к повышенной утомляемости оператора.
Предлагаемый манипулятор отличается от известных тем, что его сервоприводы выполнены необратимыми, губки схвата исполнительиой руки оснащены системой датчиков давления. Задающая рука имеет разъемный кожух, фиксируемый на тыльной стороне кисти оператора, а также рукоятку, удерживаемую в ладони оператора и соединенную с кожухом посредством системы толкателей, управляемых с помощью датчиков исполнительной руки и обеспечивающих в выбранном
масштабе перемещение рукоятки относительно кожуха по направлению и с усилиями, пропорциональными нагрузке на механизм схвата. Такое выполнение манипулятора улучшает его 5 эксплуатационные качества и снижает утомляемость оператора.
В ко/кухе задающей руки выбраны полости, позволяющие осуществлять движение двух пальцев оператора относительно друг друга
0 и кожуха, а также установлен датчик положения пальцев. Это обеспечивает управление положением губок схвата исполнительной руки. На чертеже изображена иринципиальная
5 схема манипулятора.
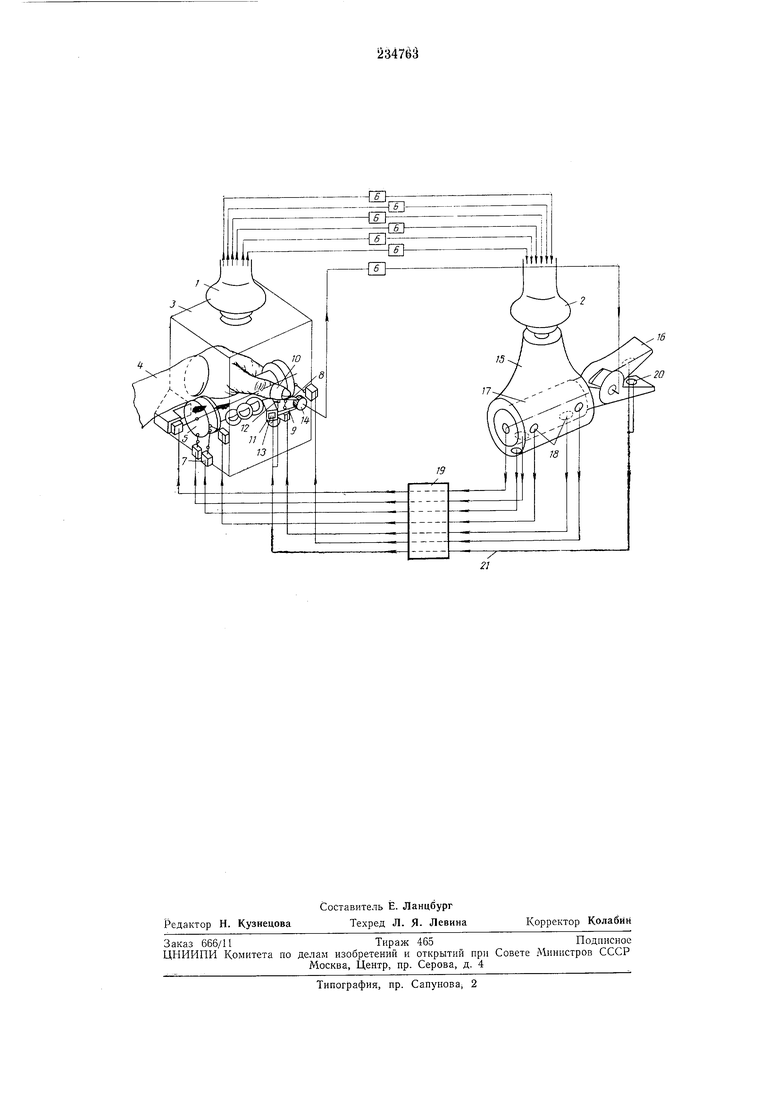
Манипулятор содержит задающую / и исполнительную 2 руки. Задающая рука имеет разъемный кожух 3, внутренняя поверхность которого плотно, но без давления обхватывает
0 тыльную часть кисти оператора. Рука 4 оператора внутри кожуха держит рукоятку 5.
Кожух закреплен на легкой задающей руке 1, аналогичной по кинематической схеме исполнительной руке 2. В шарнирах задающей
5 руки находятся датчики, иапример потенциометрические, сигнал с которых поступает на необратимые следящие системы 6. Следящие системы перемещают исполнительную руку, отслеживая положение задающей руки. Таким
оператор управляет движением исиолнительнон руки. Так как следящие системы необратимые, а задаюи ая рука и кожух могут бытЕз выиолиены весьма легкими, то оиератор испытывает незиачительные мыгиечиые нагрузки. Рукоятка 5 служит не для упрагзлення, а только для ииформироваиня оператора о иагрузках. Она может перемещаться в кожухе в любых направлениях на величину, достаточную для того, чтобы оператор мог ощущать давление иа ладонь. Эти перемещения производятся шестью толкателями 7. Толкатели имеют пиевМО-, гидро- или электропривод и закреплеиы на кожухе 3 таким образом, чтобы рукоятка имела в иространстве шесть движений степеней свободы (три перемещеиия вдоль трех перпендикулярных координатных осей и три вращения вокруг этих же осей).
В теле кожуха имеются полости, в которых могут двигаться два пальца руки оператора (например, больщой и указательный) и два рычажка 8 R 9 с закрепленными на их коицах кольцами 10 и 11, в которые могут продеваться большой и указательный пальпы руки оператора. У колец на стороне подушечек пальцев руки имеются толкатели 12 и 3, воздействующие на пальцев. Рычажкп связаны с датчиком положения рабочих губок механизма схвата 14.
Исполнгггельная рука 2 имеет корпус 15 с механизмом схвата 16, задачей которого является удержание объектов работы. Механизм ехвата 16 содержит элемент 17, форма которого аналогична форме рукоятки 5. На элементе закреплепы датчики 18 давлеиия в местах, соответствующих установке толкателей 7 по рукоятке. Сигнал от каждого датчика через усилительное уетройство 19 управляет соответствующими толкателями 7. Кроме того, на рабочих губках механиз ма схвата 16 имеются датчики 20 давления, управляюпхие толкателями 12 и 13.
Работа с манипулятором ироизводится следующим образом.
Оператор берет ладонью рукоятку 5, прнчем больщой и указательный пальцы вставляет в кольиа 10 п //. После этого руку обхватывают кожухом.
Двигая в пространстве руку, оиератор перемещает кожух 3, который через систему следящих приводов заставляет двигаться исполпительну о руку 2. При взаимодействии захвата с объектом сигналы датчиков давления на его элементе 17 приводят в дейетвие толкатели 7, последние переместят соответствующим образом рукоятку относительно кожуха, в котором закреплена кисть оператора. При этом оператор будет ощущать давление рукоятки так, как еели бы он держал ладонью
элемент 17. Это давление будет пропорциоиальио (в выбранном масштабе) нагрузке, воздействующей на мехаииз.м схвата 16.
Благодаря тактильной чувствительности оператор ио характеру давлеиия рукоятки на ладонь будет иметь представлепие о направлении и величине сил, действующих на мехаТ1ИЗМ схвата 16.
Поскольку, помимо тактпльной связи с
объектом работы, оператор имеет еще и зрительную связь, то он будет иметь полное представление об обстановке в обслуживаемом рабочем иространстве. Представление о величине схвата оператор
получает от толкателей 12 и 13, вмонтированных в кольца 10 и //. Эти толкатели воздействуют на подушечки пальцев с силой, пропорциональной показателям датчика 20. Эти показапия передаются по капалу 21 связи.
Кроме чисто тактильной информации об объекте работы, возможно и комбинирование предложенной системы с обычными обратимыми следящими системами. Папример, возможио устройство, аиалогичное оиисанному выше,
но отличающееся от него наличием обратимой следящей системы только в каиале, управляющем сжатие.м губок схвата. В это.м случае канал 21 оеязательной связи, датчики 20 н толкатели 12, 13 Ее нужны.
.-,
Предмет и а о о р е т е н и я
1.Манипулятор с осязательны.м очувствлением, содержащий задающую, исполнительную руки и сервоприводы, отслеживающие пространственное положение киети оператора, и очувствленный по нагрузке, восприиимаемой механизмом схвата, отличающийся тем, что, с целью улучшения его эксплуатационных качеств и снижения утомляемости оператора,
сервоириводы выполнены необратимыми, губки схвата исполнительной руки оснащены системой датчиков давления, задающая рука снабжена разъемным кожухом, фиксируемым на тыльной стороне кисти оператора, а также
рукояткой, удерживаемой в ладони оператора и соединенной с кожухом посредством системы толкателей, управляемых с иомощью датчиков исполнительной руки и обеспечивающих в выбранном масштабе перемещение рукоятки
относительно кожуха по направлению и с усилиями, пропорциональными нагрузке иа механизм схвата.
2.Манипулятор по п. 1, отличающийся тем, что, с целью управления положением губок
схвата исполнительной руки, в кожухе задающей руки выбраны полости, позволяющие осуИ1,ествлять движение двух пальцев оператора относительно друг друга и кожуха, а также установлен датчик положения пальцев.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВПТБ -г.|'1||?1 t*'?f^n^'"Tp.-.7 I | 1973 |
|
SU406718A1 |
| КОНТРОЛЛЕР КИСТИ ДЛЯ ИСПОЛЬЗОВАНИЯ В КОНТРОЛЛЕРЕ ОПЕРАТОРА РОБОТОХИРУРГИЧЕСКОГО КОМПЛЕКСА | 2019 |
|
RU2716353C1 |
| КОНТРОЛЛЕР ОПЕРАТОРА ДЛЯ УПРАВЛЕНИЯ РОБОТОХИРУРГИЧЕСКИМ КОМПЛЕКСОМ | 2019 |
|
RU2718595C1 |
| МАНИПУЛЯТОР | 1970 |
|
SU271252A1 |
| МАНИПУЛЯТОР | 1971 |
|
SU313653A1 |
| АССИСТИРУЮЩИЙ ХИРУРГИЧЕСКИЙ КОМПЛЕКС | 2020 |
|
RU2720830C1 |
| Манипулятор | 1972 |
|
SU446411A2 |
| Задающий орган манипулятора | 1986 |
|
SU1393619A1 |
| Устройство для управления манипулятором | 1987 |
|
SU1445948A1 |
| КОНТРОЛЛЕР ЗАПЯСТЬЯ ДЛЯ ИСПОЛЬЗОВАНИЯ В КОНТРОЛЛЕРЕ ОПЕРАТОРА РОБОТОХИРУРГИЧЕСКОГО КОМПЛЕКСА | 2019 |
|
RU2718568C1 |