1
Изобретеиие отиосится к области дистанционного управления и контроля объектами с двухнозицио ными исполиитбльными органами и с длительным временем непрерывной работы без местного обслуживания и ремонта устройств автоматики.
Известны системы избирательного управления, содержащие пульт управления, датчики, селектор исполнительных органов, блоки формирования сигналов состояния исполнительных органов аварийной сигнализации и автоматического управления, распределитель команд дистанционного управления и ячейки сигнализации положения исполнительных органов.
Известные системы характеризуются низкими функциональными возможностями, заключающимися в отсутствии дистанционной коррекции с пульта управления алгоритма работы блока автоматического управления при постепенном появлении ошибок на нескольких его выходах. Необходимость избирательной с накоплением коррекции алгоритма работы блока автоматического управления возникает, кроме того, прн управлении объектом в ситуациях, не иредусмотренных алгоритмами автоматического унравления. В этих случаях необходимо отключать некоторые каналы автоматического управления, для того чтобы исключить помехи
дистанционному управлению объектами со стороны блока автоматического управления. Кроме того, в известных системах не обеспечен оперативный контроль управления, что затрудняет работу оператора.
Для расширения функциональных возможностей в предлагаемую систему введены распределитель команд восстановления автоматического упразленпя, один вход которого соеднкеп с входом селектора, другой - с первым входом распределителя, а выход распределителя команд - с нулевыми входами триггеров, еднннч :ые входы которых
соединены с выходом распределителя и дополнительными входами соответствующнх переключательных элементов, управляющие входы которых соединены с выходами соответствующих триггеров, нервымн входами
схем И и соответствующими входами схемы ИЛИ, выход которой подключен к соответствующей лампе подсветки кнонкн контроля управления, вторые входы схем И подключены к кнонке контроля управления панели управления, а выходы схем И соединены с донолннтельными входами соответствующих ячеек сигнализации, основные входы переключательных элементов соединены со вторым выходом блока автоматического управления, а выход каждого из переключательных
элементов соединен с, соответствующим исполнительным органом.
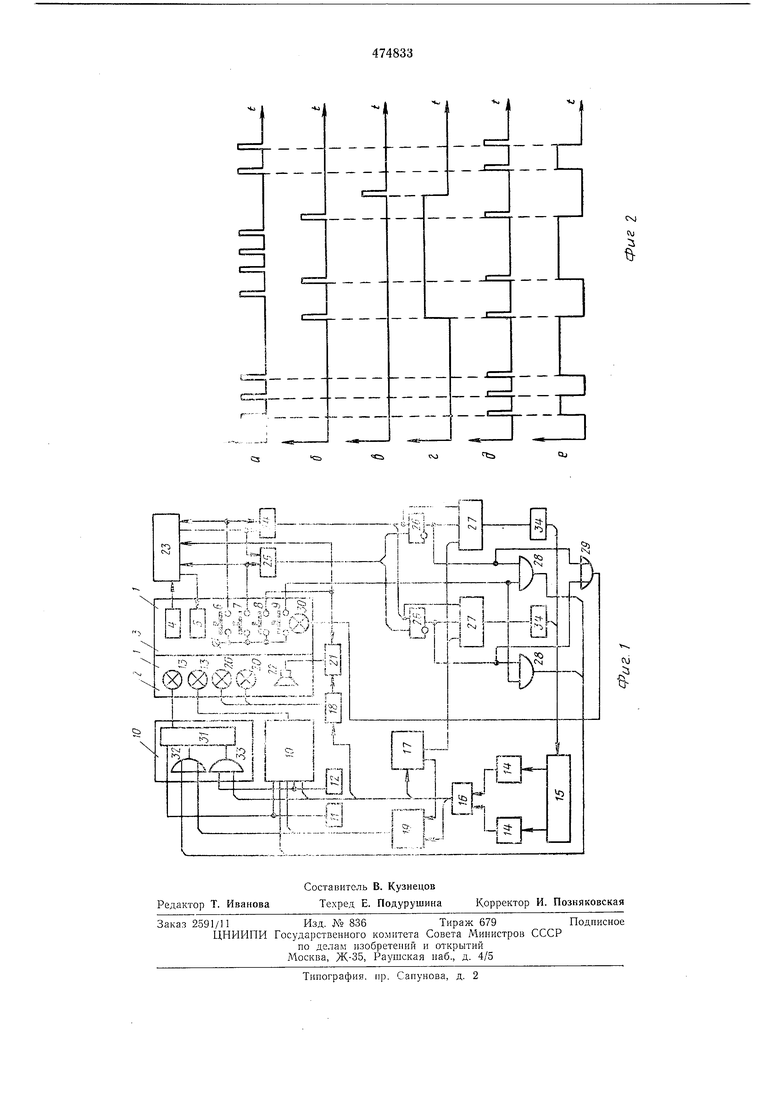
На фиг. 1 изображена блок-схема предлагаемой системы дистаппионного управления и контроля двумя исполнительными органами; на фиг. 2 - эпюры состояний элементов системы.
Система дистанционного управления и контроля содержит пульт 1 управления, в состав которого входят панели контроля 2 и управления 3, задатчик 4 адреса, табло 5 адреса, кнопки дистанционного управления 6, восстановления автоматического управления 7, сброса 8, контроля унравления 9, ячей|кн 10 сигнализации. Одни входы ячеек 10 соединены с выходом генератора 11 мигающего света, другие - с выходом генератора 12 ровного света, а выходы - с соответствующими лампами 13 подсветки м 1емознаков нснолннтельных органов. Входы датчиков 14 соединены с соответствующими выходами объекта 15 управления, а выходы через формирователь 16 сигналов состояния исполннтельных органов подключен к входам блока
17автоматического унравления, блока 18 аварийной сигнализации, к третьим входам ячеек 10 сигнализации непосредственно, а к четвертым входам ячеек через блок 19 формирования сигналов несоответствия положения исполнительных органов. Другой вход блока 19 связан с первым выходом блока 17, первый выход блока 18 соединен с соответствующими лампами 20 подсветки табло отклопеиия параметров, второй выход блока
18связан с входом блока 21 звуковой сигнализации, выход которого связан со звуковым прибором 22 панели 2 контроля, а второй вход блока 21 звуковой сигнализации соединен с кнопкой 8 сброса панели 3 управления и первым входом селектора 23, остальные три входа которого соединены соответственно с двумя входами раснределителей 24 и 25, кнопкой 7 восстановления автоматического управления и задатчиком 4 адреса нанелн 3 унравления. Табло 5 адреса подключено к выходу селектора 23, один вход распределителя 25 команд восстановления автоматического управления соединен с четвертым входом селектора 23, другой - с первым входом распределителя 24, а выход распределителя 25 команд - с нулевыми входами триггеров 26. Единичные входы триггеров 26 соединены с выходом распределителя 24 и дополнительиыми входами соответствующих переключательных элементов 27, управляющие входы которых соединены с выходами соответствующих триггеров 26, первыми входами схем И 28 и соответствуюняими входами схемы ИЛИ 29, выход которой подключен iK лампе 30 подсветки кнопки 9 контроля управления. Вторые входы схем И 28 подключены к кнопке 9 контроля управления, а выходы соедииены с управляющими входами переключательных элементов 31 через соответствующие схемы
ИЛИ 32 ячеек 10 сигнализации, основные входы которых связаны с выходами схем И 33. Основные входы переключательных элементов 27 соединены со вторым выходом блока 17 автоматического управления, а выход каждого из нереключательных элементов 27 соединен с соответствующим исполнительным органом 34. В нормальных усл0;вия,х управление исполнительными органами 34 осуществляется блоком 17 автоматического унравления, при этом триггеры 26 находятся в нулевом состоянии (см. фиг. 2г). Команды автоматического управления (см. фиг. 2а) с выходов блока 17
через нереключательные элементы 27 (см. фиг. 2д) поступают на соответствующие исполнительные органы 34. Каждая команда переводит исполпительный орган в состояние, противоположное ранее занимаемому (см.
фиг. 2е): первая комаида открывает исполнительный орган 34, а вторая закрывает его и т. д.
Если возникает несоответствие между положением иснолнительиых органов 34 и значениями контролируемых параметров объекта, которое может произойти, например, из-за неиснравностей в работе блока 17, блок 19 формирует сигналы несоответствия, которые через схемы ИЛИ 32 поступают на
управляющие входы переключательных элементов 31, на дополнительных входах которых всегда имеется напряжение генератора II мигающего света. В результате засвечиваются мигающим светом лампы 13 подсветки мнемознаков исполнительных органов. Кроме того, засвечиваются лампы 20 подсветки табло отклонения параметров, связанные с соответствующими выходами блока 18 аварийной сигнализации, и блок 21
звуковой сигнализации включает звуковой прибор 22.
Оператор квитирует звуковой сигнал нажатием кнопки 8 сброса и переводит отказавщий каиал автоматического управления
на дистанционное управление. Для этого задатчиком 4 оператор вводит адрес корректируемого канала управления в селектор 23, который засвечивает табло 5 адреса и формирует сигнал, поступающий на входы распределителей 24 и 25.
После проверки пра1вильности набора адреса исполнительного органа по табло 5 оператор нажимает кнопку 6 дистанционного управления. На соответствующем выхоДе распределителя 24 появляется комада дистанционного управления (см. фиг. 26), которая поступает на «единичный вход триггера 26 и на дополнительный вход переключательного элемента 27.
Соответствующий триггер 26 переходит в состояние «I и на управляющем входе переключательного элемента 27 появляется сигнал, разрещающий прохождение команд дистанционного управления с дополлительного входа на выход переключательного элемента (см. фиг. 2д) и на соответствующий исполнительный орган 34, который при поступлении команды дистанционного управления изменяет свое состояние на противоположное.
После завершения перекладки исполнительного органа при отпускании кнопки 6 селектор 23 устанавливается в нулевое положение, гаснет номер исполнительного органа на табло 5, а триггер 26, установленный в «I, остается в этом состоянии, запрещая прохождение команд блока 17 автоматического управления.
Для перевода рассматриваемого канала управления исполнительным органом 34 с дистанционного управления на автоматическое оператор аналогично рассмотренному ранее случаю задатчиком адреса 4 вводит адрес исполнительного органа в селектор 23. После проверки правильности набора по табло 5 адреса оператор нажимает кнопку 7 восстановления автоматического управления, воздействующую на распределитель 25 команд восстановления автоматического управления, на соответствующем выходе распределителя 25 появляется команда восстановления автоматического управления (см. фиг. 2в), которая поступает на нулевой вход триггера 26 и устанавливает его в «О. Сигнал исчезает на управляющем входе соответствующего переключательного элемента 27 и тем самым восстанавливается прохождение команд блока 17 автоматического управления.
Контроль вида управления осуществляется следующим образом.
При наличии хотя бы одного канала управления, переведенного на дистанционное управление, сигнал «I с выхода триггера 26 поступает через схему ИЛИ 29 на лампу 30 подсветки кнопки 9 контроля управления. Если необходимо знать, какие каналы управления переведены на дистанционное управление, оператор нажимает кнопку 9 контроля управления, которая подает сигнал па вторые входы схем И, если на первых входах присутствуют сигналы «I триггеров 26, то сигналы с выходов схем И 28 через схемы ИЛИ 32 поступают на управляющие входы переключательных элементов 31 и обеспечивают тем самым прохождение мигающего света на лампы 13 подсветки мнемознаков исполнительных органов.
По миганию ламп 13 оператор устанавливает, какие из исполнительных органов объекта нереведены на дистанционное унравление. Отсутствие мигания указывает на автоматическое управление соответствующих исполнительных органов.
Предмет изобретения
Система дистанционного управления и контроля, содержащая пульт управления, в
состав которого входят папе.Ш контрол.ч н управления с сигналь ымп лампами, табло и кнопки, ячейки снгпализлчии. первые входы которых соединены с :-тыходом ;-ене;)атора мигающего света, вторые - с выходом генератора ровного света, а выходы - с соответствующими лампами подсветки панели контроля, датчики, входы которых соединены с соответствующими выходами объекта управления, а выходы - через формирователь сигналов состояния исполнительных органов - с входами блока автоматического управления, блока аварийной сигнализации, к третьим входам ячеек сигнализации непосредственно, а к четвертым входам ячеек - через блок формирования сигналов несоответствия положения нснолнительных органов, другой вход которого связан с первым выходом блока автоматического управления, первый выход блока аварнйной cnrHavTH3aцнп соединен с соответствующими лампами панели контроля, второй - с первым входом блока звуковой сигнализации, выход которого связан с соответствующим звуковым прибором панели контроля, а второй вход блока звуковой сигнализации соединен с кнопкой сброса панели управления и первым входом селектора, остальные три входа которого соединены соответственно с двумя входа.ми распределителей, кнопкой восстановления автоматического управления и задатчиком адреса папелн управления, табло адреса исполнительного органа которой подключено к выходу селектора, вход объекта управления соединен с выходами нснолнительных органов, отл ич аю щ а я с я тем, что, с целью расщиренпя функциональных возможностей системы, в нее введены распределитель команд восстановлення автоматического управления, одип вход которого соединен с четвертым входом селектора, другой - с первым входом распределителя, а выход распределителя ко.манд - с нулевыми входами триггеров, единичные входы которых соединены с выходом распределителя н дополнительными входами соответствующих переключательных элементов, управляющие входы которых соединены с выходами соответствующих триггеров, первыми входами схем И и соответствующими входами схемы ИЛИ, выход которой подключен к соответствующей сигнальной лампе папелн управления, вторые входы схем И подключены к кнопке контроля управления панелн управления, а выходы схем И соединены с управляющими входами соответствующих ячеек спгналпзацни, основные входы переключательных элементов соединены со вторым выходом блока автоматического управления, а выход каждого из переключательных элементов соединен с соответствующнм исполнительным органом.
CNJ M
:i
f
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления и контроля | 1978 |
|
SU920796A1 |
| Устройство для дистанционного управления и контроля | 1973 |
|
SU491971A1 |
| Система погрузки-выгрузки жидких грузов на судне | 1981 |
|
SU1064583A1 |
| Устройство для управления судовым агрегатом | 1975 |
|
SU596995A1 |
| Устройство для передачи, приема и воспроизведения телесигналов | 1978 |
|
SU752440A1 |
| Система для дистанционного управления объектами и сигнализации о их состоянии | 1977 |
|
SU741306A1 |
| Устройство для приема телесигналов | 1983 |
|
SU1137497A1 |
| Устройство для сигнализации состояния двухиозиционного исполнительного механизма | 1979 |
|
SU858046A2 |
| Устройство для избирательногоупРАВлЕНия РЕВЕРСиВНыМи дВуХпОзициОН-НыМи элЕКТРОпРиВОдАМи | 1976 |
|
SU842759A1 |
| Адаптивное устройство для обучения языкам | 1987 |
|
SU1441445A1 |
-.12
Qj
