(54) СИСТЕМА УПРАВЛЕНИЯ И КОНТРОЛЯ
| название | год | авторы | номер документа |
|---|---|---|---|
| Система дистанционного управления и контроля | 1972 |
|
SU474833A1 |
| Система для дистанционного управления объектами и сигнализации о их состоянии | 1977 |
|
SU741306A1 |
| Устройство для дистанционного управления и контроля | 1973 |
|
SU491971A1 |
| Кодовый замок | 1980 |
|
SU924733A1 |
| Устройство для сигнализации состояния объекта управления | 1976 |
|
SU1056241A1 |
| Автоматизированная система управления производственными процессами | 1973 |
|
SU492852A1 |
| Установка для регулирования положения сооружений | 1991 |
|
SU1795000A1 |
| УСТРОЙСТВО ДЛЯ АВАРИЙНОЙ СИГНАЛИЗАЦИИ И ОПОВЕЩЕНИЯ | 1992 |
|
RU2075783C1 |
| УСТРОЙСТВО ДИСПЕТЧЕРСКОГО УПРАВЛЕНИЯ РАСПРЕДЕЛЕНИЕМ ВОЗДУХА В ГОРНЫХ ВЫРАБОТКАХ И ГОРОДСКИХ КОЛЛЕКТОРАХ | 1992 |
|
RU2010978C1 |
| МНОГОКАНАЛЬНОЕ РЕГУЛИРУЮЩЕЕ УСТРОЙСТВО | 1985 |
|
SU1329432A1 |
1
Изобретение относится к автоматизированным системам управления и контроля процессов сложных технологических объектов, имеющих как детерминированные, так и недетерминированные причинно-следственные связи между состояниями механизмов, аппаратов и параметров.
Известно устройство, содержащее полную мнемосхему объекта и сменные мнемосхемы его частей, позволяющие представить оператору как информационную модель управляемого объекта, так и его частей, именуемые оперативно-информационными моделями, представляемые оператору при отклонении какого-либо параметра управляемого процесса от заданного режима 1.
Недостатками устройства являются сложность эксплуатации и контроля для объектов со сложными недетерминированными причинно-следственными связями между состояниями параметров и положениями исполнительных органов.
Известна также система управления и контроля, содержащая датчики, входы которых соединены с соответствующими выходами контролируемого объекта, блоки сигнали ации, блоки блокировки и мажоритарные блоки, входы которых соединены с выходами датчиков, а выходы - с блоками сигнализации, блокировки и исполнительными блоками 2.
Недостатки этой системы управления и контроля - сложность эксплуатации и контроля.
Наиболее близкой к изобретению по технической сущности и достигаемому результату является система управления и контроля, содержащая пульт управления, ячей10ки сигнализации с подключенными к ним генераторами мигающего и ровного света и лампами подсветки мнемознаков, датчики, контролирующие положение исполнительных органов объекта управления и выдающие
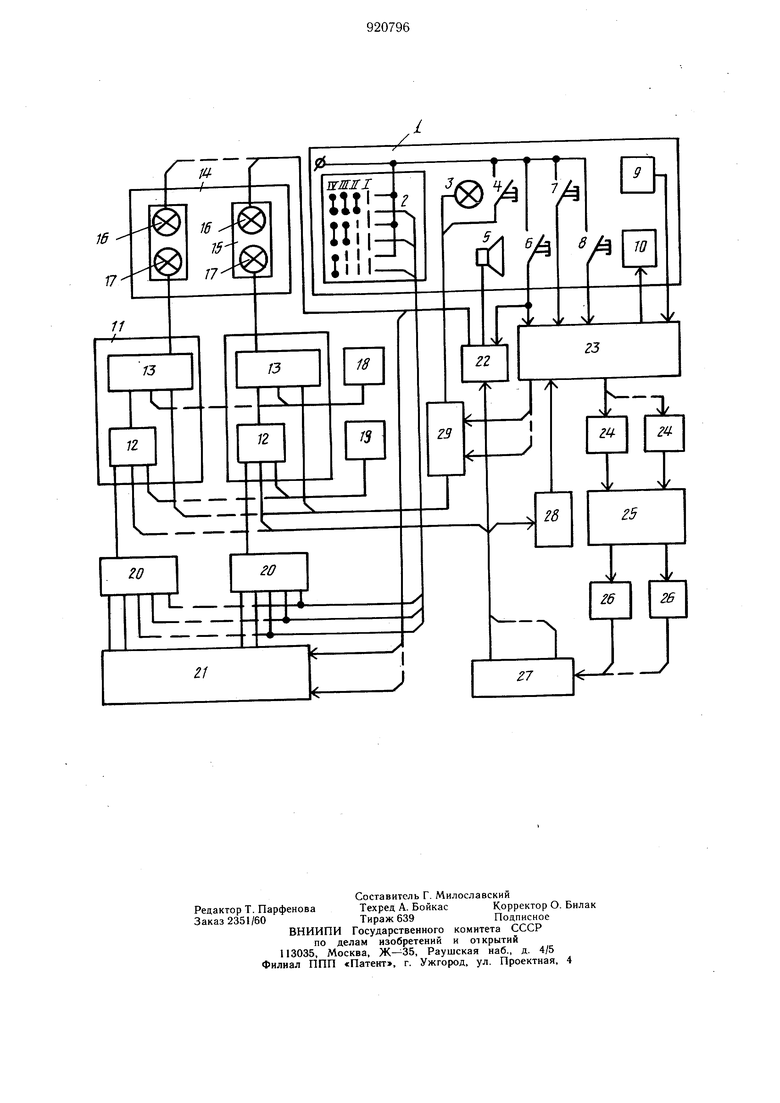
15 сигнал об этом через формирователь сигналов в блок автоматического управления, блок аварийной сигнализации и ячейки сигнализации непосредственно и через блок формирования сигналов несоответстии положения исполнительных органов, другой вход которого связан с блоком автоматического управления, при этом блок аварийной сигнализации соединен с другими лампами пульта, а через блок звуковой сигнализации - со звуковым прибором и кнопкой сброса. селектор, с размещенными на пульте зь датчиком и табло адресг) диетапцнопного управления, два раснреде.чителя команд, соединенных с селектором и с кнопками дистанционного управления и восстановления автоматического управления пульта тригтерами и переключательными элементами, входы которых соединены с блоком автоматического управления, а выходы - с исполнительными органами. Для коптроля вида управлеь1ия система снабжена элементами И, подключенными к кнопке контроля управления пульта и триггерами, выходы элементов И соединены с ячейками сигнализации и элементом ИЛИ, выход которого соединен с лампой подвески кнопки контроля управления, а входы - с выходами соответствующих триггеров. При возникновении отклонений в режиме работы системы, например, несоответствия положения исполнительного органа и контролируемого параметра, возникшего, пре/тноложим, из-за неисправности в блоке автоматического управления, блок формирования сигналов несоответствия выдает об этом сигнал через ячейку сигнализации на лампу подсветки мнемознаков, которые засвечиваются мигаюплим светом. Кроме того, включается соответствующая лампа табло отклонения параметров 3. Недостатками системы являются сложность эксплуатации и контроля для объектов со сложными недетерминированными причинно-следственны.ми связями между сос; тояниями параметров и положениями ис; полнительных органов. Цель изобретения - упрощенпе эксплуатации и контроля. Указанная цель достпгается тем, что в систему управления и контроля, содержащую пульт управления сигнальная лампа и кнопка контроля управления которого соединены соответственно с первым выходом и первььм входом блока контроля управления, звуковой прибор - с первым выходом блока аварийной сигнализации, кнопка сброса - с первыми входами блока аварийной сигнализации и блока управления, кнопка восстановления авто.матического управления, кнопка дистанционного управления и задатчик адресов -- соответственно с вторым, третьим и четвертым входами блока управления, а табло адреса - с первым выходом блока управления, группа вторых выходов которого соединена с группой вторых входов блока контроля управления, пятый выход блока управления соединен с выходом блока автоматического управления, а группа третьих выходов блока управления .соединена через исполнительные органы со входами объекта управления, выходы которого через датчики соединены с входами формирователя сигналов состояния исполнительных органов и параметров, выхо.1,ы KOTopoio соединепы со входа.ми блока аитоматическо1о управления, первыми входами элементов И ячеек сигнализации и группой вторых входов блока аварийной сигнализации, группа вторых выходов котороIo соединена с группой первых входов первой ла.мп индикации .модулей мнемознаков мнемозащита, вторая группа входов второй группы ламп индикации модулей мнемознаков мнемощнта соединена с выходами переключательных элементов ячеек сигнализации, первые входы которых соединены с выходом генератора мигающего света, вторые входы - с группой вторых выходов блока контроля управления, а третьи входы - с выходами соответствующих элементов И ячеек индикации, вторые входы которых соединены с генератором ровного света, введены мажоритарные элементы, выходы которых соединены с третьими входами соответствующих элементов И ячеек сигнализации, m входов - с соответствующими выходами задатчика вида информационной модели пульта управления, а оставшиеся п входов - с соответствующими выхода.ми матрицы вероятностных зависи.мостей состояний исполнительных органов и параметров, группа входов которой соедипена с группой третьих выходов блока аварийной сигнализации. На чертеже представлена структурная схема системы управления и контроля. Система управления и контроля содержит пульт 1 управления, в состав которого входят задатчик 2 вида информационной модели объекта, сигнальная лампа 3, кнопка 4 контроля управления, звуковой прибор 5, кнопка 6 сброса, кнопка 7 восстановления автоматического управления, кнопка 8 дистанционного управления, задатчик 9 адресов и табло 10 адреса; ячейки 11 сигнализации, в. состав которых входят эле.менты И 12 и переключательные элементы 13; .мнемощит 14, в состав которого входят модули мнемознаков 15 с первой и второй группами ламп 16 и 17 индикации; генераторы 18 мигающего света и генератор 19 ровного света; .мажоритарные элементы 20; матрицу 21 вероятностных зависимостей состояний исполнительных органов и параметров; блок 22 аварийной сигнализации; блок 23 управления; исполнительные органы 24; объект 25 управления; датчики 26; формирователь 27 сигналов состояния исполнительных органов и параметров; блок 28 автоматического управления и блок 29 контроля управления. Задатчик 2 вида информационной модели объекта пульта управления 1 соединен с m входами мажоритарных элементов 20, сигнальная лампа 3 и кнопка 4 контроля управления - соответственно с первым выходом и первым входом блока 29 контроля управления, звуковой прибор 5 - с первым выходом блока 22 аварийной снгналнзации, кнопка 6 сброса - с первыми входами блока.22 аварийной сигнализации и блока 23 управления, кнопки 7 и 8 и задатчик 9 адресов - соответственно со вторым, третьим и четвертыми входами блока 23, а табло 10 адреса - с первым выходом блока 23. Блок 23 управления соединен группой вторых выходов с группой вторых входов блока 29 контроля управления, пятым входом - с выходом блока 28 автоматического управления и группой третьих выходов, через исполнительные элементы 24 со входами объекта управления 25, выходы которого через датчики 26 соединены со входами формирователя 27 сигналов состояния исполнительных органов и параметров. Выходы формирователя 27 соединены с входами блока 28, первыми входами элементов И 12 ячеек 11 сигнализации и группой вторых входов блока 22. Группа третьих выходов блока 22 соединена с группой входов матрицы 21 вероятностных зависимостей состояний исполнительных органов и параметров и группой первых входов первой группы ламп 16 индикации, при этом вторая группа ламп 17 индикации соединена с выходами переключательных элементов 13 ячеек 11 сигнализации. Первые входы переключательных элементов 13 соединены с генератором 18, вторые входы - с группой вторых выходов блока 29, третьи входы - с выходами соответствующих элементов И 12 ячеек 11 сигнализации, вторые входы которых соединены с генератором 19, а третьи входы - со соответствующими выходами мажоритарных элементов 20, п оставщихся входов которых соединены с выходами матрицы 21. Система управления и контроля работает следующим образом. В нормальных условиях управление объектом осуществляется блоком 28 автоматического управления, выполняющим функции селектирования и распределения. В системах с недетерминированными связями между различными параметрами и состояниями исполнительных органов и других элементов системы часто возникают ситуации, когда отклонение параметра происходит по причинам, непредвиденным блоком 28 автоматического управления (например, внешние воздействия). Для обеспечения возможности ускорения процесса принятия оператором рещения, близкого к оптимальному, в устройстве использована матрица 21 вероятностных зависимостей состояний исполнительных органов и параметров, на входы которой подаются сигналы о происшедщем отклонении. Согласно программе, заложенной в матрице 21, сигналы поступают на несколько входов мажоритарных элементов 20, соответствующих исполнительным органам или параметрам, состояние которых связано причинно-с.челственнымп связями с данным отклонением. Л1атрица 21 выполнена таким образом, что при поступлении на один из ее входов cniiuija на одну группу мажоритарных элементов 20 поступает сигнал на п их входов (при числе всех входов М п +П1,причем, число входов, подключенных на матриц) у всех мажоритарных элементов п ), на вторую группу - (п-1) входов и т. д., при этом на мнемощите 14 одной группе мажоритарных элементов 20 соответствует оперативно-информационная модель с вероятностью Р причинно-следственной зависимости, другой группе - с вероятностью PI, третьей группе - с вероятностью PZ и т. д., при этом , Р,Р2 и т. д. Если оператор установит задатчик 2 в положение 1, то при отклонении какого-.чибо параметра засветятся ровным светом одна или несколько ламп 17, которые соответствуют исполнительным органам или параметрам, связанным с происи ед1пим отклонением причинно-следственными связями со значением вероятности, близким к I. Каждое положение органа (например, левое, правое или верхнее, среднее, нижнее) и состояние параметра (например, нормальное, допустимое повышепие; допустимое понижение) отображается одной лампой, освещаюи1ей или часть мпемознака или имеющей различного цвета светофильтр. Засветится одновременно с группой ламп 17 также соответствующая данному отклонению лампа 16 и включается звуковой прибор 5. Оператор блокирует звуковой сигнал нажатием кнопки 6 сброса, сопоставляет полученную с мнемощита 14 информацию с имеющимися у него дополнительными данными об объекте и, приняв решение, переводит соответствующий выбранный, им лампе 17 канал автоматического управления на дистанционное управление, используя для этого задатчик 9, и, контролируя действия с помощью табло 10, нажимает кнопку 8 дистанционного управления. Для перевода рассматриваемого канала управления с дистанционного на автоматическое управление также используется задатчик 9, табло 10. а затем нажимается кнопка 7 восстановления автоматического управления. Контроль вида управления в целом по всей системе осуществляется с помощью общей лампы 3 и кнопки 4, при нажатии которой с помощью б,1ока 29 и переключательных элементов 13 на мигающее горение включаются лампы 17, если соответствующие им каналы управления находятся на дистанционном управлении. Если оператор выполнил «совет устройства, но по какой-либо непредвпденной
причине не достиг цели, либо если он сомневается в правильности подсказываемого действия и не выполняет его, либо если в положении I не зажглась ни одна лампа 17 (в матрице 26 на данное отклонение не запрограммирован «безоговорочный совет), он переводит задатчик 2 в положение II, вызывая на мнемощит И оперативно-информационную модель, все элементы которой связаны с происшедшим отклонением причинно-следственной связью с вероятностью РЬ Это значит, что при выполнении одного из подсказываемых действий (в других вариантах системы - всей совокупности действий) вероятность достижения цели составляет Р,. Аналогичным образом оператор может переводить затем задатчик 2 в положение III, IV и т. д., пока не достигнет устранения отклонения.
Упрощение эксплуатации и контроля данной системы управления и контроля происходит благодаря тому, что система сообщает оператору не только пути достижения цели, но и различные вероятности ее достижения для каждого из них. Своевременное устранение отклонений в процессе управляемого объекта приводит к сокращению простоев, потерь материала, повыщению качества продукции, предупреждению аварий, несчастных случаев, т. е. позволяет в целом повысить технико-экономические показатели управляемого объекта.
Формула изобретения
Система управления и контроля, содержащая пульт управления, сигнальная лампа и кнопка контроля управления которого соединены соответственно с первым выходом и первы.м входом блока контроля управления, звуковой прибор - с первым Е;ЫХОДОМ блока аварийной сигнализации, кнопка сброса - с первыми входами блока аварийной сигнализации и блока управления, кнопка восстановления автоматического управления, кнопка дистанционного управления и задатчик адресов - соответственно с вторым, третьим и четверты.м вхог дами блока управления, а табло адреса - с первым выходом блока управления, группа вторых выходов которого соединена с
группой вторых входов блока контроля управления, пятый вход блока управления соединен с выходом блока автоматического управления, а группа третьих выходов блока управления соединена через исполнительные органы со входами объекта управления, выходы которого через датчики соединены с входами формирователя сигналов состояния исполнительных органов и параметров, выходы которого соединены со входами блока автоматического управления, первыми входами элементов И ячеек сигнализации и группой вторых входов блока аварийной сигнализации, группа вторых выходов которого соединена с группой первых входов первой группы ламп индикации .MOS дулей мнемознаков мнемощита, вторая группа входов второй группы ламп индикации модулей мнемознаков мнемощита соединена с выходами переключательных элементов ячеек сигнализации, первые входы которых соединены с выходом генератора мигающего света, вторые входы - с группой вторых выходов блока контроля управления, а третьи входы - с выходами соответствующих эле.ментов И ячеек индикации, вторые входы которых соединены с 5 генератором ровного света, отличающаяся тем, что, с целью упрощения эксплуатации и контроля, в систему введены мажоритарные элементы, выходы которых соединены с третьими входами соответствующих элементов И ячеек сигнализации, ш входов - 0 с соответствующими выхода.ми задатчика вида информационной модели пульта управления, а оставшиеся п входов - с соответствующими выходами матрицы вероятностных зависимостей состояний исполнительных органов и параметров, группа входов которой соединена с группой третьих выходов блока аварийной сигнализации.
Источники информации, принятые во внимание при экспертизе 1. Венди В. Ф. Инженерная психология и синтез систем отображения информации. М., 1975, с. 14-15 и 139-146.
№ 474833, кл. G 08 С 15/02, 1972 (прототип).
