Изобретение относится к области электротехнических систем и устройс и предназначено для дистанционного управления включением (отключением) двухпозиционных исполнительных механизмов и сигнализации о их состоя нии. Известны системы для дистанционногр управления и сигнализации,содержащие пульты управления,в состав которых входят панели управления и контроля, блоки формирования сигналов, дистанционного управления, ячейки сигнализации I, Наибр.лее близкой по технической сущности данной является система для дистанционного управления механизмами и сигнализации о их состоянии, содержащая на пульте управл ния блок формирования команд управления, блок индикации, элементы управления, выходы которых и выход блока формирования команд управления соединены соответственно с первым и вторым входами блока распределения сигналов управления, выход которого соединен с первыми входами логических блоков, первыми выходами подключенных ко входам соответствую щей группы исполнительных механизмов, выходы которых соединены со вторым входом соответствующего логического блока, блок индикации в ней выполнен в виде детальных мнемосхем всего оборудования, располагаемых на лицевых панелях пульта. В систему входят также блоки селекции исполнительных органов, располагаемые частично в пульте, а частично в периферийных приборах, блоки формирования сигналов контроля. Передача команд дистанционного управления от блока селекции к исполнительным механизмам осуществляется через распределитель команд. Для получения информации от.отдельных исполнительных механизмов предусмотрены блоки формирования сигналов. Применение в системе блоков селекции исполнительных органов и блока распределения команд в совокупности с их конструктивным размещением дает определенное снижение числа органов управления на пульте, а также межприборных линий связи 2. Однако принципы построения системы - наличие детальных мнемосхем всего управляемого оборудования на лицевых панелях пульта, полное конструктивное и схемное разделение
т них блоков селекции исполнительых органов, отсутствие на пульте блока, обеспечивающего обобщенную сигнализацию, ограниченность функций блока формирования сигналов контроля и т.д. приводит к недостаточной эффективности системы при управлении и контроле большого количества механизмов. Эффективность подобных систем снижается из-за значительных потребных площадей лицевых панелей пультов, большого количества межприборных линий связи, значительного суммарного веса аппаратуры и межприборного кабеля Кроме того, при управлении и контроле большим количеством механизмов недостаточно высокой оказывается эффективность работы оператора. Указанные недостатки ограничивают область применения подобных систем. Цель изобретения - повышение информативности системы за счет снижения загрузки оператора, уменьшения габаритов пульта, числа межприборных связей, упрощения системы.
Указанная цель достигается тем, что в системе блок формирования команд управления выполнен в виде координатной матрицы, концы вертикальных и горизонтальных шин которой подключены к кнопкам выбора групп механизмов, и в систему введен блок выбора и объединения информационных сигналов, первый вход которого подключен на пульте управления к выходу блока формирования команд управления, к управляющим входам блока индикации подключен выход блока выбора и объединения информационных сигналов, со вторым входом которого соединены вторые выходы логических блоков, третьи выходы которых подключены ко . входу блока формирования команд управления пульта управления.
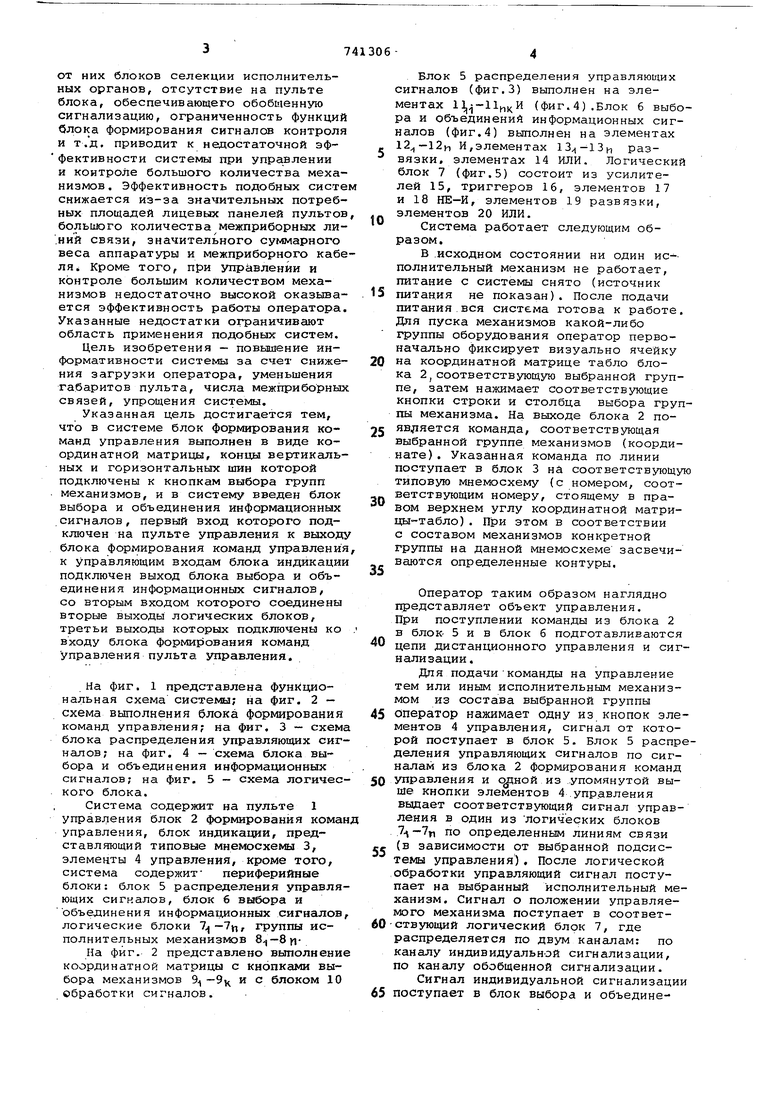
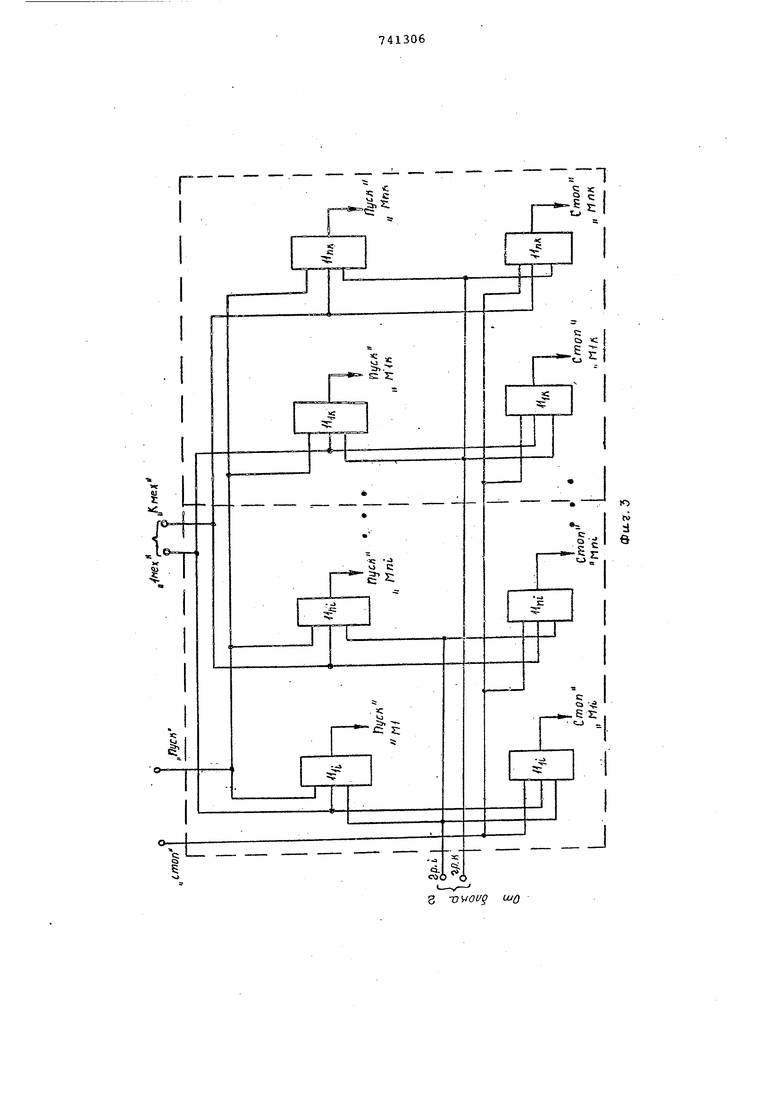
На фиг. 1 представлена функциональная схема системы; на фиг. 2 - схема выполнения блока формирования команд управления; на фиг. 3 - схема блока распределения управляющих сигналов; на фиг. 4 - схема блока выбора и объединения информационных сигналов; на фиг. 5 - схема логического блока.
Система содержит на пульте 1 управ;7ения блок 2 формирования команд управления, блок индикахдаи, представляющий типовые мнемосхемы 3, элементы 4 управления, кроме того, система содержит- периферийные блоки: блок 5 распределения управляющих сигналов, блок 6 выбора и объединения информационных сигналов, логические блоки 7 группы исполнительных механизмов фиг. 2 представлено выполнение координатной матрицы с кнопками выбора механизмов 9 -9ц и с блоком 10 обработки сигналов.
Блок 5 распределения управляющих сигналов (фиг.З) выполнен на элементах (фиг.4).Блок 6 выбора и объединений информационных сигналов (фиг.4) выполнен на элементах , И,элементах развязки, элементах 14 ИЛИ. Логический блок 7 (фиг.5) состоит из усилителей 15, триггеров 16, элементов 17 и 18 НЕ-И, элементов 19 развязки, элементов 20 ИЛИ.
Система работает следующим образом.
В .исходном состоянии ни один исполнительный механизм не работает, питание с системы снято (источник
5 питания не показан). После подачи питания вся система готова к работе. Для пуска механизмов какой-либо группы оборудования оператор первоначально фиксирует визуально ячейку
0 на координатной матрице табло блока 2,соответствующую выбранной группе, затем нажимает соответствующие кнопки строки и столбца выбора группы механизма. На выходе блока 2 по5 яв 1яется команда, соответствующая выбранной группе механизмов (координате) . Указанная команда по линии поступает в блок 3 на соответствующую типовую мнемосхему (с номером, соответствующим номеру, стоящему в правом верхнем углу координатной матрицы-табло) . При этом в соответствии с составом механизмов конкретной группы на данной мнемосхеме засвечиваются определенные контуры,
Оператор таким образом наглядно представляет объект управления. При поступлении команды из блока 2 в блок- 5 и в блок 6 подготавливаются
0 цепи дистанционного управления и сигнализации.
Для подачикоманды на управление тем или иным исполнительным механизмом из состава выбранной группы
5 оператор нажимает одну из кнопок элементов 4 управления, сигнал от которой поступает в блок 5. Блок 5 распределения управляющих сигналов по сигналам из блока 2 формирования команд
Q упраълеккя и из упомянутой выше кнопки элементов 4 управления выдает соответствующий сигнал управления в один из Логических блоков по определенным линиям связи (в зависимости от выбранной подсистемы управления), После логической обработки управляющий сигнал поступает на выбранный исполнительный механизм. Сигнал о положении управляемого механизма поступает в соответО-ствующий логический блок 7, где
распределяется по двум каналам: по каналу индивидуальной сигнализации, по каналу обобщенной сигнализации. Сигнал индивидуальной сигнализации
5 поступает в блок выбора и объединения информационных сигналов б, кото рый благодаря наличию команды.из блока 2 формирования команд управления пропускает указанный сигнал по одной из линий связи (общей для целого ряда исполнительных механизмов, имеющих единый мнемознак на данной типовой мнемосхеме), на ламп подсвечивающую данный мнемознак в блоке 3 индикации.
Для управления несколькими механизмами из состава выбранной группы оператор последовательно нажимает ряд соответствующих кнопок элементов 4 управления и при этом работа системы будет аналогична указанной. После появления сигналов отработки заданных команд (переход механизмов в соответствующие положения) оператор нажимает кнопку сброс, переводя, систему в темный (ждущий) режим работы. В результате пропадают сигналы во всех линиях связи, за исключением одной, .передающих сигнал на табло обобщенной сигнализации, расположенное в координатной матрице. Данный сигнал вырабатывается специальным каналом в блоке 7 при сравнении заданного положения (а это положение запоминается специальным устройством, входящим в блок 7) и фактического. В результате в любой момент времени в случае несоответствия любого из исполнительных механизмов, входящих в выбранную систему, заданному положению, лампа, соответствующая данному табло - координата, загорается мигающим светом.
В случае мигающего света оператор выбирает органами выбора строки и столбца соответствующую координату - группу оборудования и вызывает ее на определенную типовую мнемосхему. После этого по индивидуальной сигнализации оператор делает детальный анализ положения механизмов и подает необходимые команды управления. После исполнения команд система нажатием кнопки сброс переводится в ждущий режим работы. .В результате снятия питаний - в исходное состояние.
Указанное структурное и приборно построение систем позволяет повыси
ее эффективность за счет сокращения габаритов пультов, числа межприборных линий связи, снижения суммарноговеса аппаратуры и кабеля, а также за счет снижения загрузки оператора. Эффект снижения указанных параметров пропорционален количеству управляемых механизмов.
Формула изобретения
Система для дистанционного управления объектами и сигнализации о их состоянии, содержащая на пульте управления блок формирования команд управления, блок индикации, элементы управления, выходы которых и выход блока формирования команд управления соединены, соответственно с первым и вторым входами блока распределения сигналов управления, выход которого соединен с первыми входами логических блоков, первыми выходами подключенных ко входам соответствующей группы исполнительных механизмов, выходы которых соединены со вторым входом соответствующего логического блока отличающаяся тем, что, с целью повышения информативности системы, в ней блок формирования команд управления выполнен в виде координатной матрицы, концы вертикальных и горизонтальных шин которой подключены к кнопкам выбора групп механизмов, и в систему введен блок выбора и объединения информационных сигналов, первый вход которого подключен на пульте управления к Выходу блока формирования команд управления, а к управляющим входам блока индикации подключен выход блока выбора и объединения информационных сигналов, со вторым входом которого соединены вторые выходы логических блоков, третьи выходы которых подключены ко входу блока формирования команд управления пульта управления.
Источники информации, принятые во внимание при экспертизе
1.Патент США № 3201754, кл. 340-147, 1962.
2.Авторское свидетельство СССР
474833, кл. G 08 С 15/02, 28.09.72 (прототип).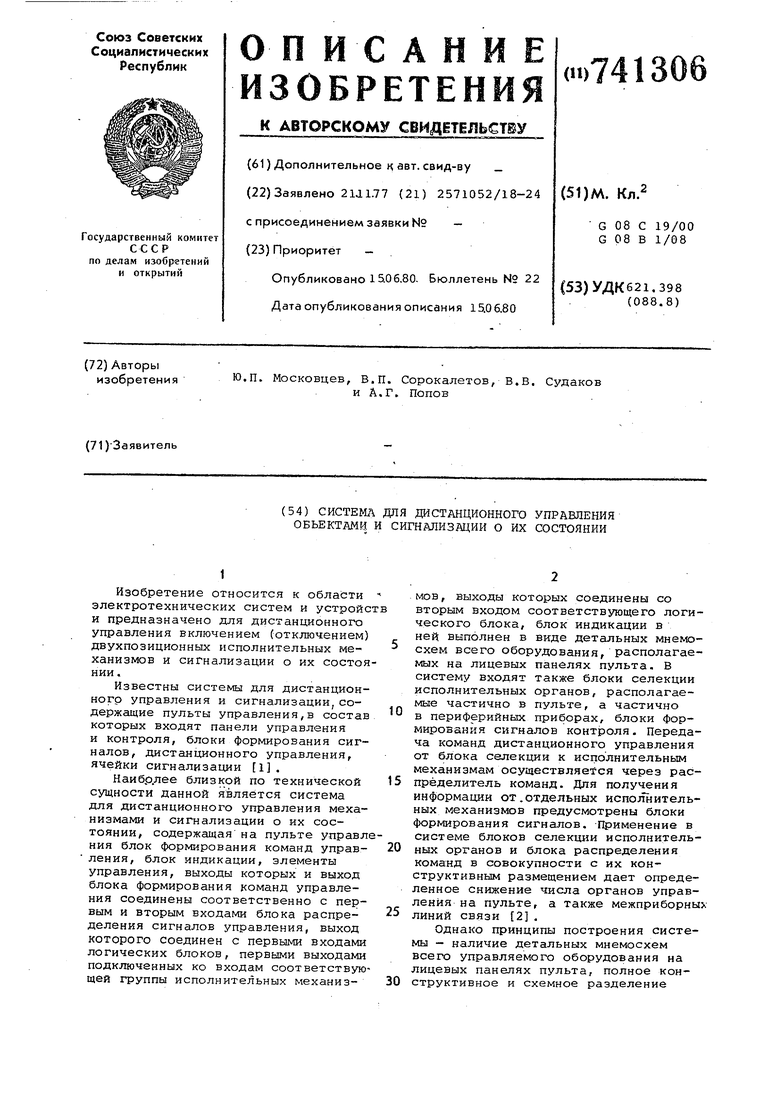
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического централизованного контроля параметров технических средств судна и управления вспомогательным оборудованием | 1972 |
|
SU500119A1 |
| Система управления и контроля | 1978 |
|
SU920796A1 |
| УСТРОЙСТВО БЕСШНУРОВОЙ КРОССОВОЙ КОММУТАЦИИ КАНАЛОВ | 2001 |
|
RU2214067C2 |
| ИНФОРМАЦИОННО-УПРАВЛЯЮЩИЙ КОМПЛЕКС АВТОМАТИЗИРОВАННОЙ СИСТЕМЫ УПРАВЛЕНИЯ ПОДГОТОВКОЙ ДВИГАТЕЛЬНЫХ УСТАНОВОК И ТЕХНОЛОГИЧЕСКИМ ОБОРУДОВАНИЕМ РАКЕТ КОСМИЧЕСКОГО НАЗНАЧЕНИЯ НА ТЕХНИЧЕСКОМ И СТАРТОВОМ КОМПЛЕКСАХ | 2015 |
|
RU2604362C1 |
| Пункт управления системы телемеханики | 1975 |
|
SU558288A1 |
| Способ контроля и регулирования режима работы трубопровода | 1990 |
|
SU1839706A3 |
| Устройство для дистанционного управления и контроля | 1973 |
|
SU491971A1 |
| Система автоматического контроля и управления технологическими процессами | 1972 |
|
SU454575A1 |
| Система автоматического централизованного контроля и управления техническими средствами судна | 1980 |
|
SU901165A2 |
| СИСТЕМА ДИСТАНЦИОННОГО УПРАВЛЕНИЯ МАШИНОЙ СО СТРЕЛОВЫМ ОБОРУДОВАНИЕМ | 2017 |
|
RU2642026C1 |

CSpoc
//
Ml У Л 2 группа, грдгто.. zfi/wa
Ж rVfi ЛзГж f I I -
9Л//Л11Л
2/ i/Wfla
IIt Т rf
Фаг. 2
S -ovouq ujQ
и и. .ли.уа.тарой
«eia«u.u-nnoaOJAei U(aafon,)
не la. Hu.-)Mffg
