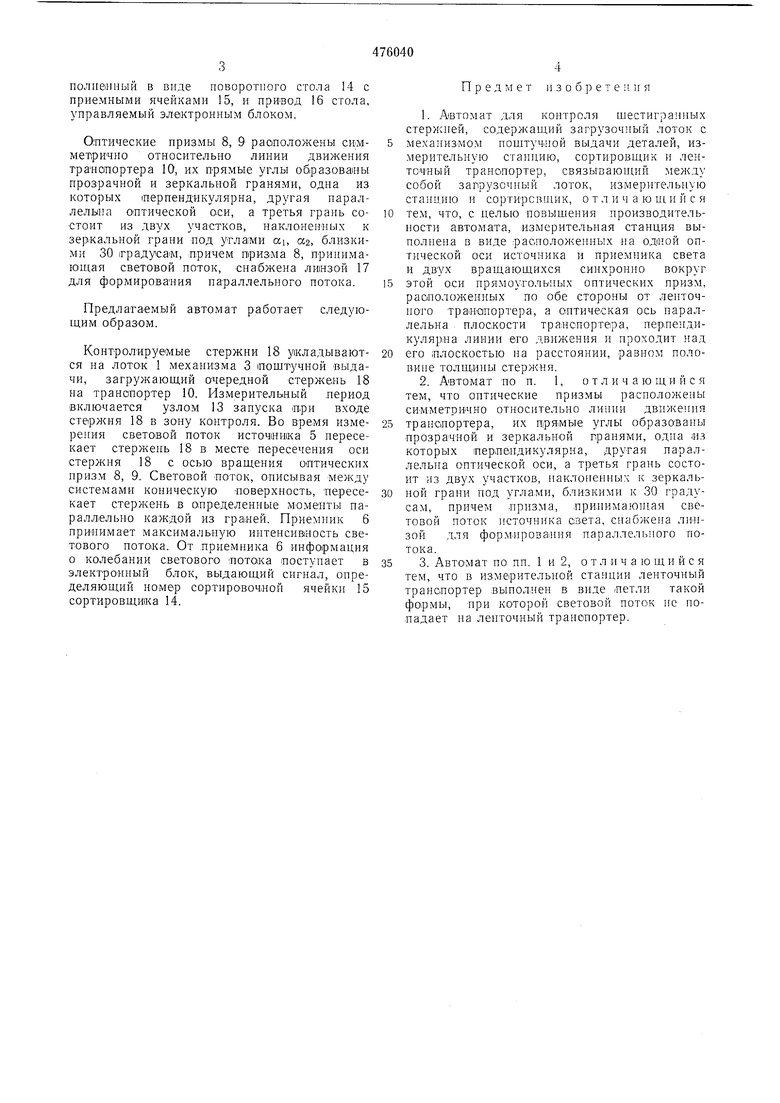
полпееный в виде поворотного стола 14 с приемными ячейками 15, и привод 16 стола, управляемый электронным блоком.
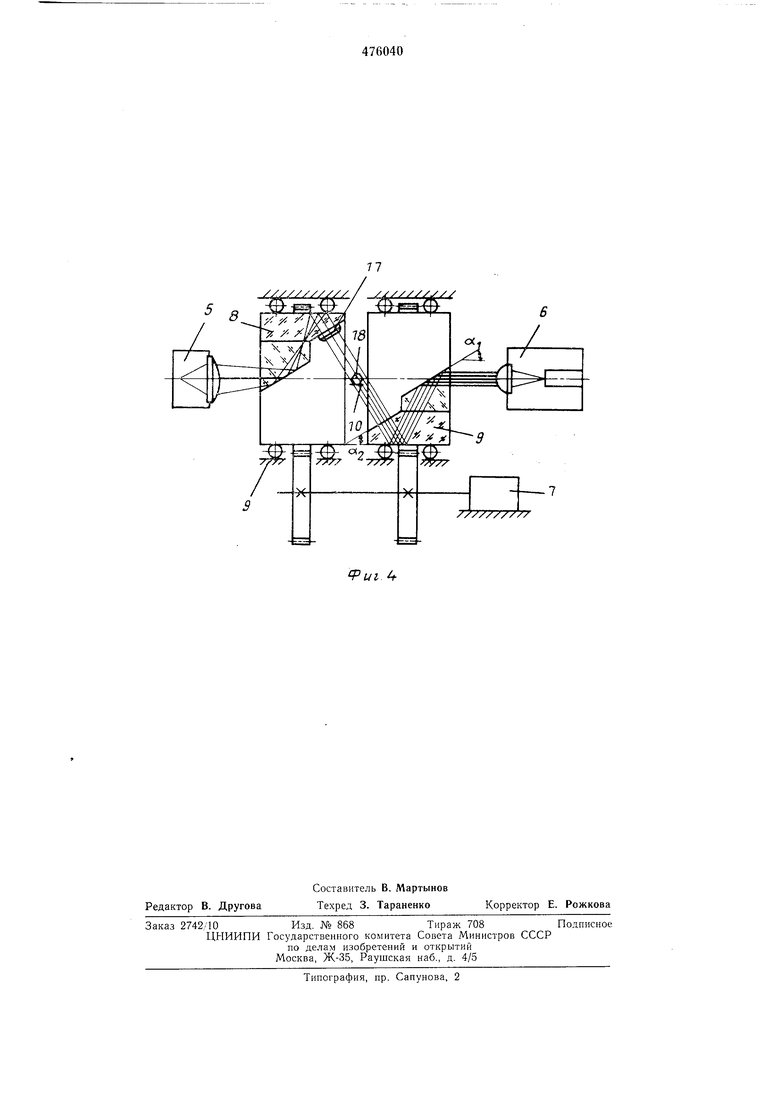
Оптические призмы 8, 9 рааполол ены си ммет.рично относительно линии движения трапапортера 10, их прямые углы образованы прозрачной и зеркальной гранями, одна из которых (Перпендикулярна, другая параллельна Оптической О.СИ, а третья грань состоит из двух участков, накло:нениых к зер.кальной грани под углами аь а2, близкими 30 градуса, причем шризАШ 8, принимающая световой поток, снабжена лиизой 17 для формирования параллельного потока.
Предлагаемый автомат работает следующим образом.
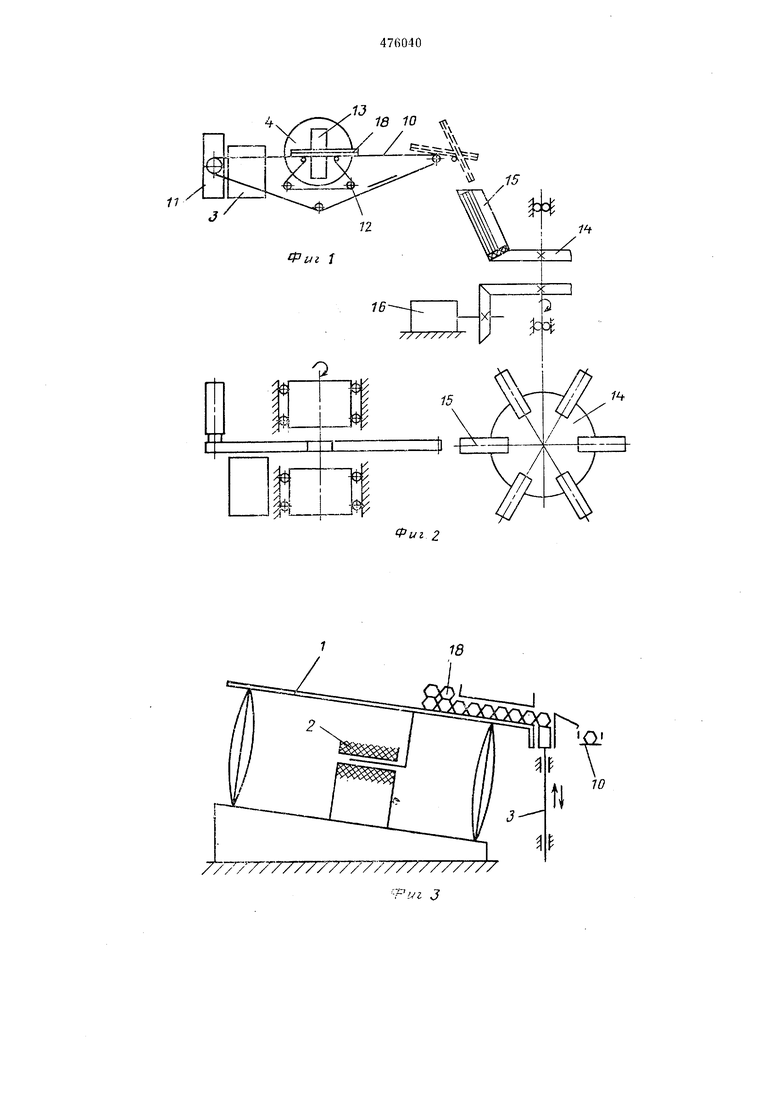
Контролируемые стержни 18 укладываются на лоток 1 механизма 3 оощтучной выдачи, загружающий очередной стержень 18 на транспортер 10. Измерительный .период включается узлом 13 запуска «рн входе стержня 18 в зону контроля. Во время измерения световой поток источиика 5 пересекает стержень 18 в месте пересечения оси стержня 18 с осью вращения оптических призм 8, 9. Световой поток, описывая между системами коническую поверхность, пересекает стержень в определенные моменты нараллельно каждой из граней. Приемник 6 принимает максимальную интенсивность светового потока. От приемника 6 информация о колебании светового .потока поступает в электронный блок, выдающий сигнал, определяющий номер сортировочной ячейки 15 сортировщика 14.
Предмет и з о б р е т е и и я
1.Автомат для контроля шестигранных стержней, содержащий загрузочный лоток с
механизмом поп1туч-ной выдачи деталей, измерительную станцию, сортировщик и ленточный транспортер, связывающий между собой загрузочный лоток, измерительную станцию и сортировншк, о т л ц ч а ю пш и с я
тем, что, с целью повыщения производительности автомата, измерительная станция выполнена в виде расположенных на одной оптической оси источника и приемника света и двух вращающихся синхронно вокруг
этой О.СИ прямоугольных оптических призм, расположенных по обе стороны от ленточного тра напортера, а оптичеСкая ось параллельна плоскости тра.нспортера, перпе гдцкулярна линии его движения ц проходит над
его плоскостью па расстоянии, равном половине толщпны стержня.
2.Автомат по п. 1, отличающийся тем, что оптические призмы расположены симметрично относительно линии движения
транспортера, их прямые углы образованы прозрачной и зеркальной гранями, одна пз которых перпендикулярна, .другая параллельна оптической оси, а третья грань состоит из двух участков, наклоненных к зеркальной грани под угла.ми, близкими к 30 градусам, причем призма, при.нимающая световой ноток сточнцка озета, снабжена ЛИНзой для формпрова.ния параллельного потока.
3. Автомат по пн. 1 и 2, о т л и чающийся тем, что в измерительной станции ленточный транспортер выполнен в виде петли такой формы, при которой световой ноток не попадает на ленточный тра гспортер.
п
Фиг Г
18 10
-
15
Ш
Ж
7
| название | год | авторы | номер документа |
|---|---|---|---|
| Автомат для контроля шестигранных стержней | 1975 |
|
SU553441A1 |
| Способ контроля размера сечения правильных многогранных стержней | 1972 |
|
SU456137A1 |
| Автомат для контроля и сортировки цилиндрических деталей | 1987 |
|
SU1443978A1 |
| Многопозиционный автомат для контроля и сортировки цилиндрических деталей | 1980 |
|
SU961796A1 |
| •СЕСОЮЗНАЯ | 1973 |
|
SU361823A1 |
| Автомат для контроля стержней | 1974 |
|
SU499902A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ КОЭФФИЦИЕНТОВ ОТРАЖЕНИЯ И ПРОПУСКАНИЯ | 1991 |
|
RU2018112C1 |
| АВТОМАТ ДЛЯ КОНТРОЛЯ ДЕТАЛЕЙ ПО ЛИНЕЙНРАЗМЕРАМ5Ш" | 1972 |
|
SU425671A1 |
| Картофелеуборочный комбайн | 1960 |
|
SU131995A1 |
| АВТОМАТ ДЛЯ КОНТРОЛЯ РАДИАЛЬНОЙ ТОЛЩИНЫ ВКЛАДЫШЕЙ ПОДШИПНИКОВ ДВИГАТЕЛЕЙ | 1970 |
|
SU267094A1 |
Q Й
W
;
р.
/
7/77
Pve J
