(54) МНОГОПОЗИЦИОННЫЙ АВТОМАТ ДЛЯ КОНТРОЛЯ И СОРТИРОВКИ ЦИЛИНДРИЧЕСКИХ ДЕТАЛЕЙ

| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТ ДЛЯ КОНТРОЛЯ ДЕТАЛЕЙ ПО ЛИНЕЙНРАЗМЕРАМ5Ш" | 1972 |
|
SU425671A1 |
| ПОЛУАВТОМАТ ДЛЯ СОРТИРОВКИ ЦИЛИНДРИЧЕСКИХДЕТАЛЕЙ | 1972 |
|
SU340466A1 |
| Автомат для контроля и сортировки деталей | 1980 |
|
SU895555A1 |
| Автомат для контроля и сортировки цилиндрических деталей | 1987 |
|
SU1443978A1 |
| Устройство для управления сортировкой изделий | 1987 |
|
SU1532095A1 |
| Автомат для многодиапазонной сортировки прецизионных деталей | 1982 |
|
SU1107904A1 |
| Автомат для многодиапазонной размерной сортировки деталей, привод этого автомата и его измерительная станция | 1990 |
|
SU1816519A1 |
| АВТОМАТ ДЛЯ КОНТРОЛЯ ДЕТАЛЕЙ ПО ЛИНЕЙНЫМРАЗМЕРАМ | 1971 |
|
SU321670A1 |
| Автомат для многодиапазонной сортировки изделий | 1988 |
|
SU1602582A1 |
| АВТОМАТ ДЛЯ РАЗМЕРНОГО КОНТРОЛЯ И СОРТИРОВКИ | 1973 |
|
SU360987A1 |
1
Изобретение отнвсится к измерительной технике, а машиностроении, а именно к устройствам для сортировки деталей по размерам, измеренным электрическими средствами.
Известны многопозиционные автоматы для контроля и сортировки порочней двигателей внутреннего сгорания, содержащие загрузочное устройство, измерительные станции с преобразователями линейных перемещений в электрические сигналы, электромагнитный сортировщик с выталкивающими штоками по числу размерных групп, шаговый линейный транспортер, связывающий загрузочное устройство, станции и сортировщик, блок памяти, воспринимающий сигналы измерительных станций и передающий их электромагнитам сортировщика синхронно .с перемещением порщней щаговым транспортером 1.
В этом автомате транспортер цепного типа, а измерительные станции и сортировщик расположены вдоль него. При такой вытянутой в линию компоновке автомат весьма громоздок и сложен.
Известен также автомат для контроля и сортировки цилиндрических деталей, содержащии транспортер штангового типа с захватами; загрузочное устройство, измерительные станции с преобразователями линейных перемещений в электрические сигналы, электромагнитный сортировщик со 5 штоками по числу размерных групп и блок памяти 2.
В этом автомате измерительные станции и сортировщик расположены вдоль транспортера, поэтому габариты автомата весьма велики.
10
Целью изобретения является упрощение конструкции и сокращение габаритов авто.мата.
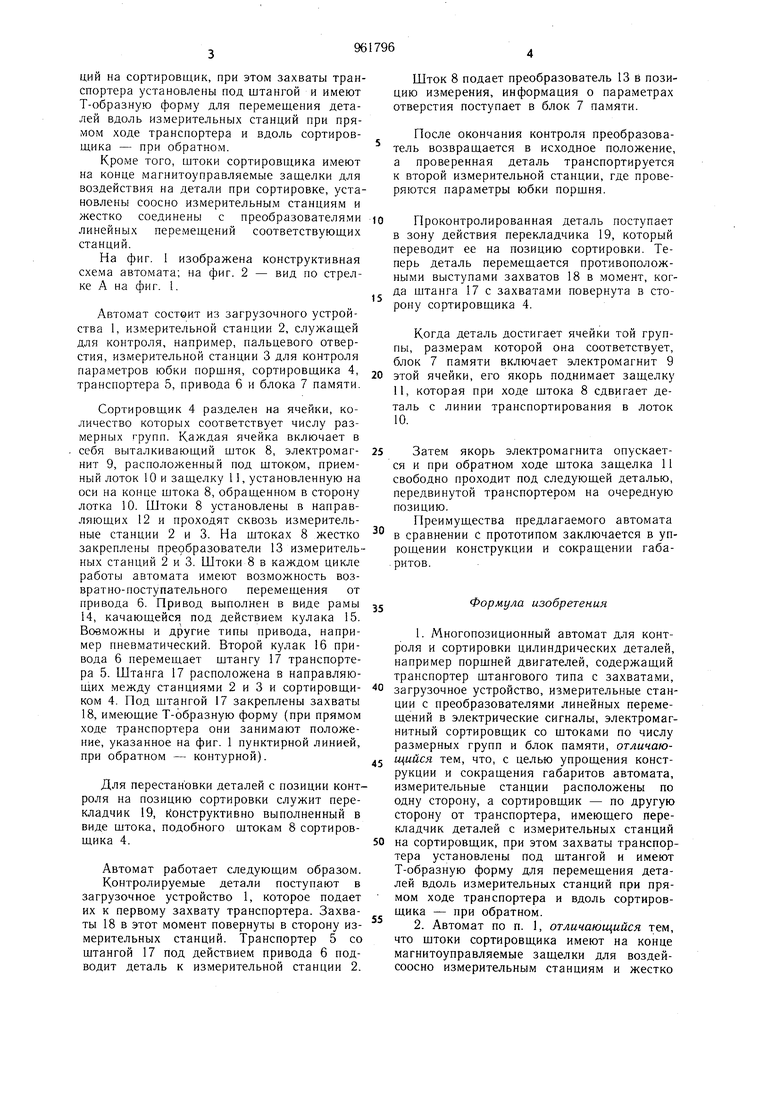
Указанная цель достигается тем, что в многопознционно.м автомате для контроля 15 и сортировки цилиндрических деталей, содержащем -транспортер щтангового типа с захватами, загрузочное устройство, измерительные станции с преобразователями линейных перемещений в электрические сиг2Q налы, электромагнитный сортировщик со штоками по числу размерных групп и блок памяти, измерительные станции расположены по одну сторону, а сортировщик - по другую сторону от транспортера, имеющего перекладчик деталей с измерительных станции на сортировщик, при этом захваты транспортера установлены под штангой и имеют Т-образную форму для перемещения деталей вдоль измерительных станций при прямом ходе транспортера и вдоль сортировщика - при обратном. Кроме того, щтоки сортировщика имеют на конце магнитоуправляемые защелки для воздействия на детали при сортировке, установлены соосно измерительным станциям и жестко соединены с преобразователями линейных перемещений соответствующих станций. На фиг. 1 изображена конструктивная схема автомата; на фиг. 2 - вид по стрелке А на фиг. 1. Автомат состоит из загрузочного устройства 1, измерительной станции 2, служащей для контроля, например, пальцевого отверстия, измерительной станции 3 для контроля параметров юбки порщня, сортировщика 4, транспортера 5, привода 6 и блока 7 памяти. Сортировщик 4 разделен на ячейки, количество которых соответствует числу размерных групп. Каждая ячейка включает в себя выталкивающий щток 8, электромагнит 9, расположенный под щтокрм, приемный лоток 10 и защелку 11, установленную на оси на конце штока 8, обращенном в сторону лотка 10. Штоки 8 установлены в направляющих 12 и проходят сквозь измерительные станции 2 и 3. На щтоках 8 жестко закреплены преобразователи 13 измерительных станций 2 и 3. Штоки 8 в каждом цикле работы автомата имеют возможность возвратно-поступательного перемещения от привода 6. Привод выполнен в виде рамы 14, качающейся под действием кулака 15. Вовможны и другие типы привода, например пневматический. Второй кулак 16 привода 6 перемещает штангу 17 транспортера 5. Штанга 17 расположена в направляющих между станциями 2 и 3 и сортировщиком 4. Под штангой 17 закреплены захваты 18, имеющие Т-образную форму (при прямом ходе транспортера они занимают положение, указанное на фиг. 1 пунктирной линией, при обратном - контурной). Для перестановки деталей с позиции контроля на позицию сортировки служит перекладчик 19, конструктивно выполненный в виде штока, подобного штокам 8 сортировщика 4. Автомат работает следующим образом. Контролируемые детали поступают в загрузочное устройство 1, которое подает их к первому захвату транспортера. Захваты 18 в этот момент повернуты в сторону измерительных станций. Транспортер 5 со штангой 17 под действием привода 6 подводит деталь к измерительной станции 2. Шток 8 подает преобразователь 13 в позицию измерения, информация о параметрах отверстия поступает в блок 7 памяти. После окончания контроля преобразователь возвращается в исходное положение, а проверенная деталь транспортируется к второй измерительной станции, где проверяются параметры юбки порщня. Проконтролированная деталь поступает в зону действия перекладчика 19, который переводит ее на позицию сортировки. Теперь деталь перемещается противоположными выступами захватов 18 в момент, когда щтанга 17 с захватами повернута в сторону сортировщика 4. Когда деталь достигает ячейки той группы, размерам которой она соответствует, блок 7 памяти включает электромагнит 9 этой ячейки, его якорь поднимает защелку 11, которая при ходе штока 8 сдвигает деталь с линии транспортирования в лоток 10. Затем якорь электромагнита опускается и при обратном ходе штока защелка 11 свободно проходит под следуюшей деталью, передвинутой транспортером на очередную позицию. Преимущества предлагаемого автомата в сравнении с прототипом заключается в упрощении конструкции и сокращении габаритов. Формула изобретения 1.Многопозиционный автомат для контроля и сортировки цилиндрических деталей, например поршней двигателей, содержащий транспортер штангового типа с захватами, загрузочное устройство, измерительные станции с преобразователями линейных перемещений в электрические сигналы, электромагнитный сортировщик со штоками по числу размерных групп и блок памяти, отличающийся тем, что, с целью упрощения конструкции и сокращения габаритов автомата, измерительные станции расположены по одну сторону, а сортировщик - по другую сторону от транспортера, имеющего перекладчик деталей с измерительных станций на сортировщик, при этом захваты транспортера установлены под штангой и имеют Т-образную форму для перемещения деталей вдоль измерительных станций при прямом ходе транспортера и вдоль сортировщика - при обратном. 2.Автомат по п. 1, отличающийся тем, что штоки сортировщика имеют на конце магнитоуправляемые защелки для воздейсоосно измерительным станциям и жестко
