1
Предлагаемый порционный дозатор предназначен для фасовки пищевых и химических продуктов в различную тару и может применяться на фасовочных базах и складах магазинов, а также для установки на расфасовочно-упаковочных автоматах.
Известные порционные дозаторы характеризуются низкой производительностью, обусловленной приводом грузоприемного ковша.
Цель изобретения - повышение производительности дозатора. Это достигается тем, что зубчатый кулачок храпового механизма закреплен на торце грузоприемного ковша, а зубчатое колесо храпового механизма установлено на валу ковша так, что его собачки шарнирно соединены с рычагом, укрепленным на передаточных звеньях ползуна, соединенного с якорем управляющего электромагнита; двуплечая собачка храпового механизма помещена на подвеске ковша и находится в зацеплении с зубчатым кулачком.
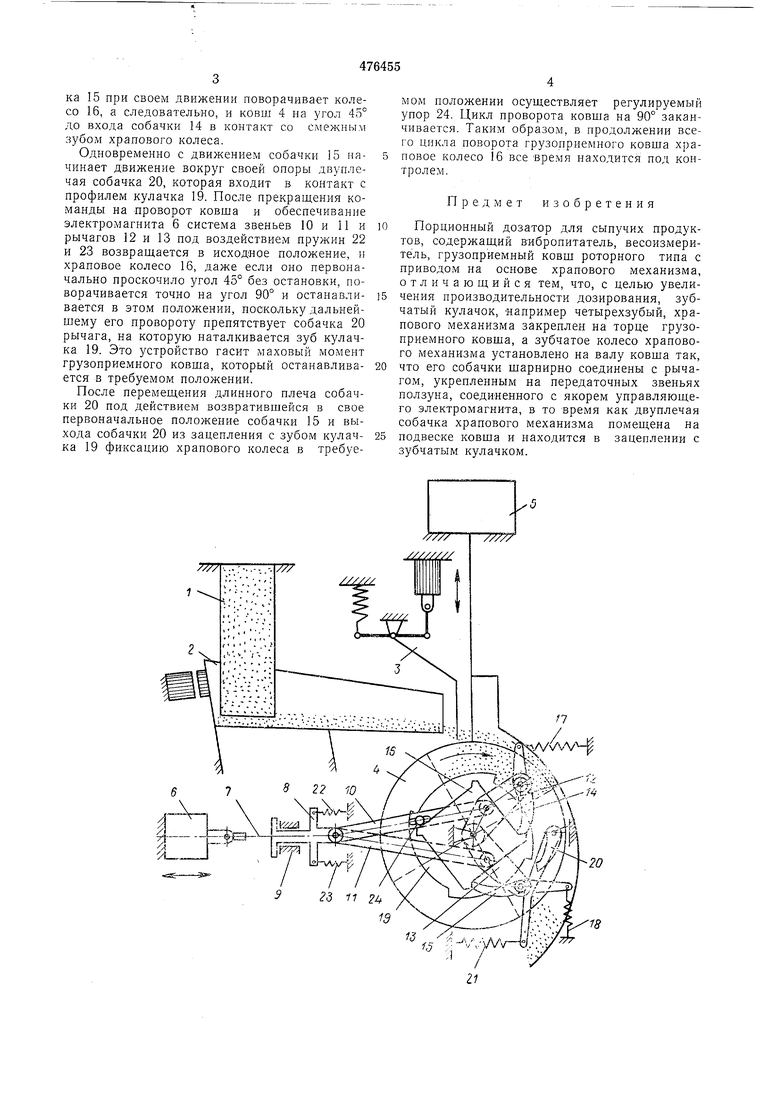
На чертеже изображена схема предлагаемого порционного дозатора с устройством для поворота грузоприемного ковша.
Порционный дозатор для сыпучих продуктов состоит изприемнойворон«и 1,1вибролитателя 2, заслонки 3, механизма грузоприемного ковша 4, подвешенного на весоизмерителе 5. Тянущий электромагнит с определенным ходом якоря 6 при помощи гибкого элемента 7 соединен
с ползуном 8, находящимся в направляющих 9.
Ползун 8 шарнирно соединен со звеньями 10 и 11, вторые концы которых тоже шарнирно соединены с рычагами 12 и 13, на концах которых свободно сидят собачки 14 и 15. Рычаги 12 и 13 свободно насажены на вал роторного грузоприемного ковша и дозатора, на котором также жестко закреплено четырехзубое храповое колесо 16. Кинематическое замыкание собачек с храповым колесом осуществляется пружинами 17 и 18. На торце грузоприемного ковша жестко закреплен кулачок 19, профиль которого имеет четыре зуба, расположенные под углом 90° друг к другу.
На подвеске грузоприемного ковша (на чертеже-не показано) закреплена двуплечая собачка 20, длинное плечо которой при по.мощи пружины 21 постоянно находится в контакте с собачкой 15. Сама собачка 20 в исходном положении выведена из контакта с кулачком 19. В исходное положение якорь электромагнита 6 возвращается пружинами 22 и 23. На рычаге 10 закреплен регулируемый упор 24.
Дозатор работает следующим образом.
При подаче команды на поворот ковша 4 п направлении, указанном стрелкой, срабатывает электромагнит 6, который при помощи ползуна 8 звеньев 10 и И и рычагов 12 и 13 воздействует на собачки 14 п 15, которые начинают поворачиваться вокруг точки О. Собач
| название | год | авторы | номер документа |
|---|---|---|---|
| Аварийное тормозное устройство | 1986 |
|
SU1342787A1 |
| МЕХАНИЗМ ФИКСИРОВАНИЯ ДИАФРАГМЫ | 1992 |
|
RU2020529C1 |
| Устройство для шагового переме-щЕНия КАРЕТКи пишущЕй МАшиНы | 1978 |
|
SU797914A1 |
| АВТОМАТ ДЛЯ СОРТИРОВКИ ПО ВЕСУ СТЕРЖНЕВЫХ ИЗДЕЛИЙ | 1990 |
|
RU2062665C1 |
| Устройство Кривовязюка для вырубки заготовок из плоского материала | 1980 |
|
SU946733A1 |
| АВТОМАТИЧЕСКИЙ ШЛАГБАУМ | 1993 |
|
RU2067940C1 |
| МАШИНА ДЛЯ ФРАНКИРОВАНИЯ ПОЧТОВЫХ ПАКЕТОВ | 1970 |
|
SU280365A1 |
| Г. М. РЫБКИН и В. Т. ЧиликовВсесоюзный научно-исследовательский инструментальный институт | 1970 |
|
SU282010A1 |
| Роторно-конвейерная линия | 1983 |
|
SU1135608A1 |
| Копировальные часы для регистрации времени прихода на работу и ухода с нее | 1930 |
|
SU26842A1 |
