Известны линейные шаговые электродвигатели, содержанхие статор с равномерно расноложенпыми вдоль окружности пoл:юca :п, cf:a6женными поперечными дуговыми зубцами, и ферромагнитный якорь с винтовыми зубцами на его цилиидрической поверхности.
В предлагаемом электродвигателе с целью повышения точностн перемещения якорь снабжен дополнительными продольными зубцами, расположенными равно.мерно на его поверхности н введен дополнительный статор с обмотками, взаимодействующий с продольными зубцами.
Кроме того, винтовые и продольные зубцы якоря расположены аксиально на общей цилиидрической поверхности, а статоры сдвинуты в аксиальном направлении относительно друг друга на расстояние, равное ходу якоря, указанные зубцы выполнены на общей вннто/вой цилиндрической поверхности якоря, а статоры сдвинуты в аксиальном направлеиии относительно друг друга на расстояние, не меньшее, чем вылет лобовых частей их обмоток, и указанные зубцы выполнены на коаксиальных поверхностях полого якоря, а статоры расположены концентрично.
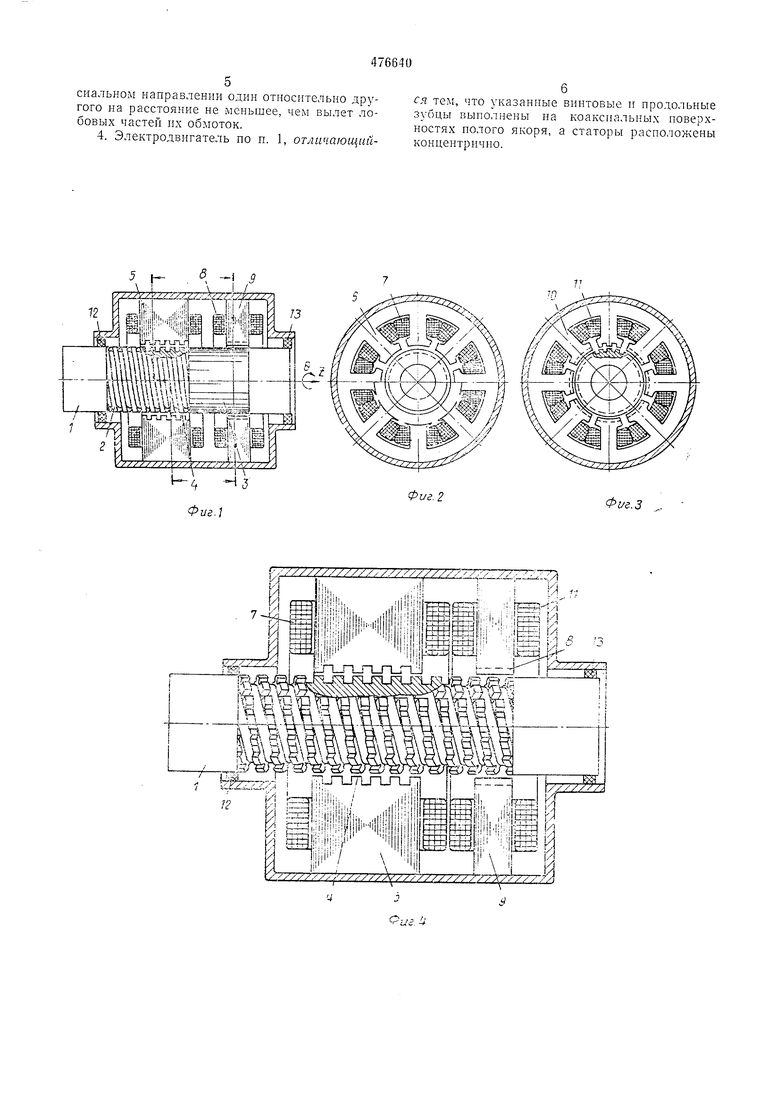
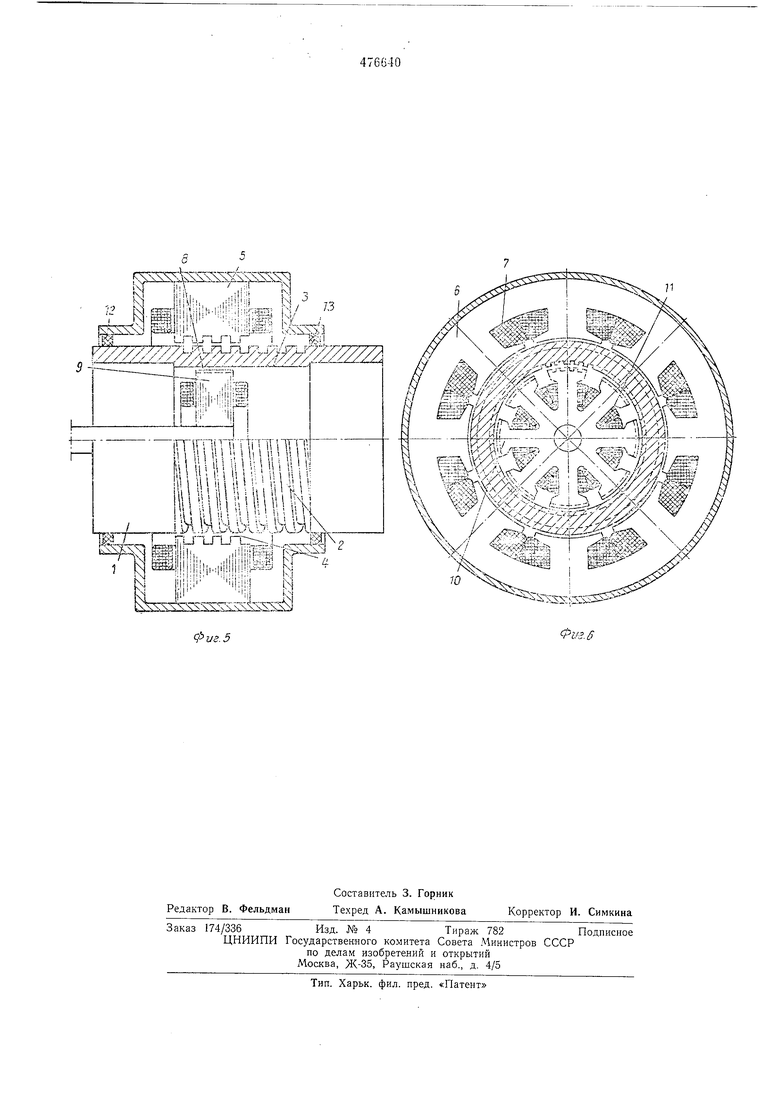
На фиг. изображен линейный шаговый электродвигатель с аксиально смещенными винтовыми и продольными зубцами в продольном разрезе; на фиг. 2 и 3 соответствеино показаны поперечные сечения .чипойной ; вращак;щейся частей; па фиг. 4 - злектрсдвпгатель с нродольнымн зубцами, сов,еп1енными с винт.-выми зубцами в продольном раззезе; на фи . 5 и 6 изображен злектродБ:;гатель соотве- ственно в продолыюм п поперечном разрезггс с коаксиальным расположением статоров.
Согласно первому варианту линейный шаговый электродвигатель (фиг. 1,2 н 3) содержит цилиндрический якорь / с винтовой 2 и продольной 3 спстемой зубцов, расположенных аксиально отпосительно друг друга га общей поверхностн якоря 1. Винтовые зубц:-1 2 якопя охвачены кольцевой (поперечной к
оси двигателя) системой зубцов 4 статора о, имеющегопродольные полюеы 6 с фазными обмотками 7.
Продольная система зубцов 5 якоря 1 охвачена продольной системой зубцов 8 статора
9, предусмотренной на продольных полюсах 10, снабженных фазными обмотками //. Число заходов винтовой нарезки 2 равно числу одновременно возбуждаемых и равномерно распределенных по окружноети статора 5 полюсов 6.
При ограниченных продольных размерах двигателя целесообразно использовать второй конструктивный вариант описываемого двигателя (фиг. 4), где продольная система зубцов 3 якоря } выполнена на винтовой 2 цилимдрпчсскоп поверхности якоря, а минилгальное расстояние но оси между пакетамн статоров 5 и 9 определяется вылетом лобовых настей нх обмоток.
Третий коиструктивпый. вариант описываемого двигателя (фиг. 5 i 6) характеризуется малым осевым размером и высоки.м иенользова1И ем активной поверхности якоря /. В нем в.нитовая 2 и продольная 3 системы 3)биов якоря выполнены иа коаксиальных поверхностях, а расиоложен1 е статоров 5 н 9 - концеитрнческое.
Оноры 12 и 13 всех рассмотренных вариантов должны обеспечивать движение якоря / с двумя степенями свободы (вращательное и иоступательное движение).
На приведенных чертежах изображены конетрукцин четырех(|) шаговиых двигателей с парной коммутацией обмоток, требующие двухзаходной винтовой па резки 2 якоря /.
Электродвигатель работает следующим образом. В ироцессе его работы возбуждаются и ко:.Л1утнруются обмотки обоих статоров 5 и 9.
Взаимодействие системы зубцов 4 статора 5 с виитовой зубцовой зоной 2 якоря / ири коммутации обмоток 7 вызывает липейные перемещения якоря 1 по оси Z (фиг. 1) с шагом
tz
ozi
где тг- зубцовое делеиие зоны 2 якоря и зоны 4 статора 5;
п - ЧИСЛО та.кто.з ко.ммутации обмотки 7.
Возникающая ири этом составляющая усилия по координате в (фиг. 1) уравновещивается удерживающим момеитом поворотной части двигателя (стато;р 9). Взаимодействие зубцовой зоны 8 статора 9 с зубцовой зоной 3 якоря / ири иеизмениом возбуждеиии или коммутации обмоток // идентично взаимодействию статора и ротора обычного вращающегося щагового двигателя с пассивным ротором и обеспечивает фиксацию определенного углового лоложеиия якоря или его щаговые повороты. Таким образом зубцовая система 3 якоря / и статор 9 задают угловое ноложенце якоря / и одиовремеино обеспечивают точпое поступательное продвижение якоря / с малым шагом. Это объясняется тем, что повороту яко/ря / одиовремеино еоответствует его линейное перемещение (как в обычном винте). Преобразование вращательного движения в поступательное осуществляется силамп электромагнитного взаимодействия между зубцовыми зонами 2 и 4.
поворотному щагу якоря / схл,, равному
f/r
где п - число тактов ко.м.мутации обмотки //;
Z, - число зубцов зоны 3 якоря / соответствует перемещение якоря / по оеи Z, равное
D
Кх9 СС
где D - диаметр расточки статора 5;
(р угол подъема винтовой линии при нарезке зубцов зоиы 2.
Таким образом, требуе.мое иеремещеиие Z отрабатывается в виде двух груии щагов
где AI, Л2 - числа «грубых и «точных шагов соответствеино, причем
Движение обеих координат алгебраически суммируется. Поскольку общее перемещение представлено в виде су.ммы «грубых и «точных щагов, то числа импульсов Л , и Лч в «грубом и «точном канале невелики, что иозволяет работать е :изкими частотами комаид. При относительио иизкой частоте комаид скорость перемещения, определяемая «грубь:м капало.м, и точиоеть иозиционироваиия, определяемая величиною тага ах2, -ioгут Бысоки.ми одиовременно.
Предмет и з о б р е т е и и я
1. Линейный щаговый электродвигатель, содержащий статор с равномерно расположенными вдоль окружности иолюсами, снабженными поперечными дуговыми зубцами, и ферромагнитный якорь с винтовыми зубцами на его цилиндрической поверхности, отличающийся тем, что, с целью иовыщения точности перемещения, якорь снабжен дополнительными продольными зубцами, расположеииыми равномерно на его поверхности, и введен дополнительпьи статор с обмоткалги, взаимодействующий с про.тольиылИ- зубцами.
2. Электродвигатель по п. 1, отличающийся тем, что винтовые и продольные зубцы якоря расположены аксиальио иа общей цилиндрической новерхноет 1, а статоры сдвинуты в аксиальном направлении один относительно другого иа расстояние, равиое ходу якоря.
3. Электродвигатель ио и. 1, отличающийся тем, что указагигье продольные зубцы выполиеиы на винтовой цилиидрнческой
поверхности якоря, а статоры сдвинуты в акспальном направлении один относительно друтого на расстояние не меньшее, чем вылет лобовых частей их обмоток. 4. Электродвигатель по п. 1, отличающийся тем, что указанные винтовые н продольные зуоцы выполнены па коаксиальных поверхностях полого якоря, а статоры расположены концентрично.

| название | год | авторы | номер документа |
|---|---|---|---|
| Шаговый электродвигатель | 1985 |
|
SU1399862A1 |
| Линейный шаговый электродвигатель | 1973 |
|
SU476641A1 |
| Шаговый электродвигатель | 1985 |
|
SU1427514A1 |
| Реверсивный шаговый электродвигатель | 1977 |
|
SU746829A1 |
| Многостаторный шаговый электродвигатель | 1977 |
|
SU639097A1 |
| Бесконтактная элекрическая машина | 1971 |
|
SU492020A1 |
| Линейный шаговый электродвигатель | 1984 |
|
SU1365279A1 |
| ШАГОВЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2015 |
|
RU2596145C1 |
| Электрическая машина | 1981 |
|
SU983900A1 |
| Реверсивный шаговый электродвигатель | 1959 |
|
SU126768A1 |
I. . л.
/x:-i:ziiZ ZZ2x: ii-i.sZZ;--- fti.l .1 iJ/jf
// , 7 f - -- - --
ЙЫН|,,./
j iijliilllji:,, „ij
ЙgT:1:J| ii:i;|iHi |
Йteiii
Ш|1 №ffl Я niiiii /
лiiir
/x7
,. . , . , I .i-У: ,
lrh.,i-igg
l;i о
dtt±iJ:|;i . Y о .
il (B±ri V). л
| 1 ; ill I i-V - -
J EEii: Ic t 4t-i- YJ
Ш ШЗиШй l
.: J P
. qx3l 1 ,|;ггг-т /,
mi -I ,li|BE|±i miii,i|;:ig:Ji l
3EtB:ii liipffi isl
зеЩм iJifi r/ : : и
//////// imrniTfrniiTiTrr ШфШ |i lib 1 1 i; u Ытт
Фиг. 5
Фиг. 6 «г,,.
