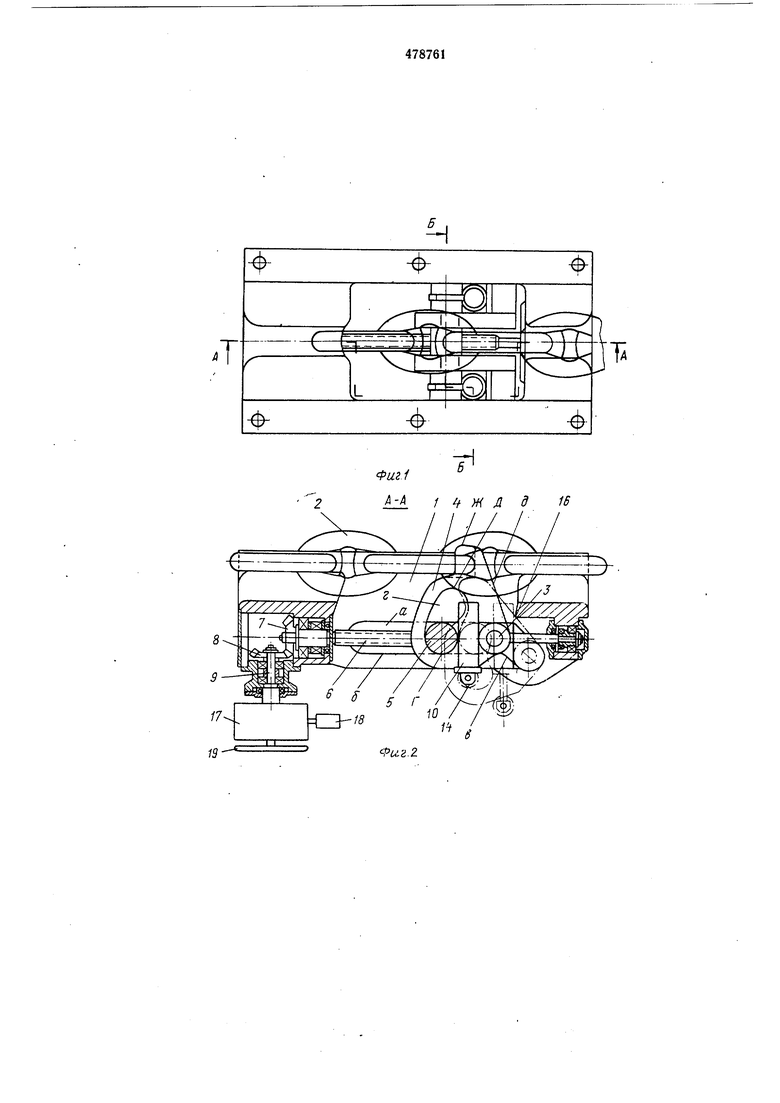
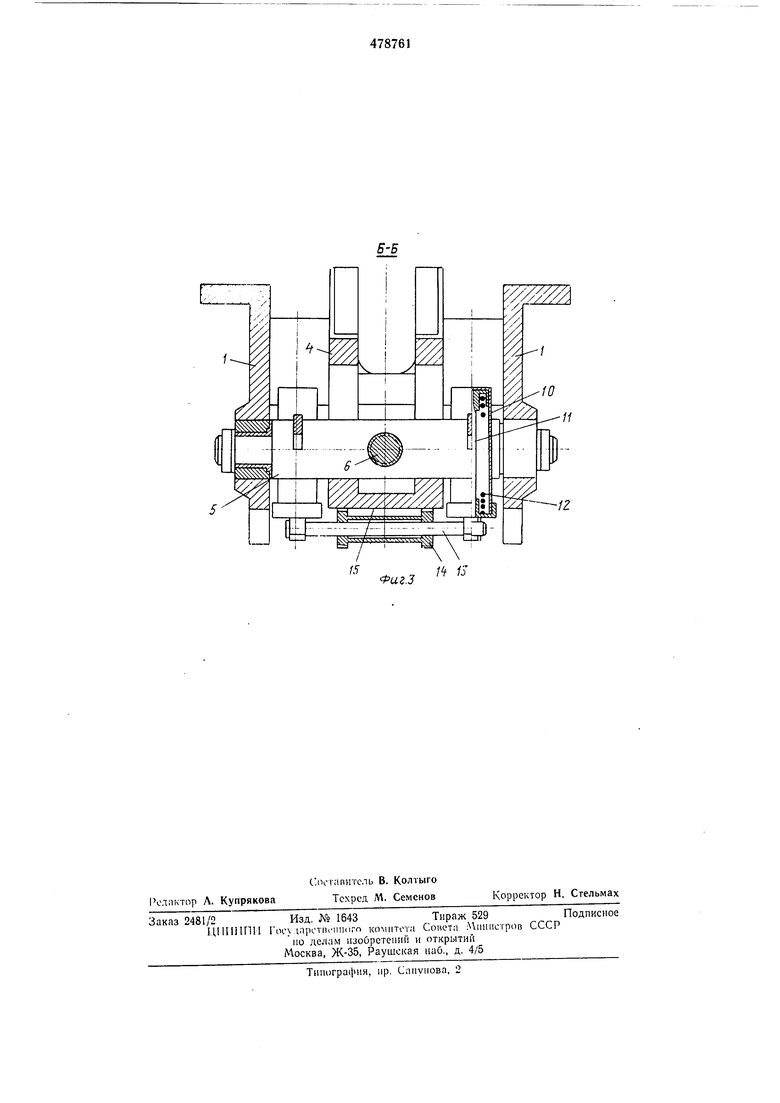
На один конец впита 6 жестко насажена коническая шестерня 7, находящаяся в зацеплении с конической шестерней 8, жестко-установленной на валу 9. На оси-гайке 5 жестко установлены стаканы 10, на штоки 11 которых надеты пружины 12 сжатия, одним концом упирающиеся в стакан 10, а вторым в шток 11. На конце штока 11 установлены на оси 13 ролнки 14, которые упираются в площадку 15 захватного элемента 4. На приливе щек корпуса 1, в районе участка продольного паза а, выполнен упор 16. Привод стопора представляет собой редуктор 17, связанный с гидромотором пли электродвигателем 18 для переключения вращения вала 9 от двигателя 18 при дистанционном управлении или от маховика 19 при ручном управлении.
Механизированное крепление цепи независимо от расположения ее горизонтальных звеньев относительно корпуса 1 стопора производится путем управления двигателем 18. Вращение от двигателя 18 через редуктор 17, вал 9, шестерни 8 и 7 передается винту 6, вращение которого вызывает перемещение оси-гайки 5 по участку б, а полуосей 3 - по участку в паза а. При этом захватный элемент скользит поверхностью д по упору 16 и одновременно разворачивается относительно полуосей 3 под действием пружины 12, воздействуюп;ей через шток 11 на ролики 14.
Если цепь 2 расположена так, что захватный элемент 4 входит в промежуток между ее горизонтальными звеньями, то при дальнейшем перемещении он выходит полуосями 3 на участок б паза а, при этом ролики 14 под действием пружины 12 {через шток 11 и ось 13) поворачивают захватный элемент 4 относительно полуосей 3 до тех пор, пока точка Г паза г захватного элемента не совместится с осью-гайкой 5. При дальнейшем вращении винта 6 захватный элемент 4 перемещается вдоль цепи 2, захватывает горизонтальное звено и натягивает цель 2 до заданного усилия, при котором двигатель 18 отключается при помощи реле давления, установленного в гидросхеме управления стопором, если в качестве двигателя 18 применен гидромотор, или реле тока, если в качестве двигателя 18 применен электродвигатель.
Если якорная цепь 2 расположена так, что захватный элемент 5 при подъеме упирается в горизонтальное звено цепи, не входя с ним в зацепление, то при дальнейшем вращении винта 6 ось-гайка 5 перемещается по участку б, а полуоси 3 выходят из участка в на участок б. При этом поверхность ж зах1ватного элемента 4 скользит ПО горизонтальному звену цепи до ближайшего промежутка между звеньями, по
достижении которого роли.ки 14 (через шток II, пружину 12 и ось 13) провернут захватный элемент 4 относительно полуосей 3 до совмещения точки Г паза г захватного элемента 4 5 с осью-гайкой 5, после чего происходит захват и натяжение цепи 2 до необходимой величины и отключение двигателя 18, как было описано ранее. При освобождении цепи 2 двигатель 18
О включается на вращение в противоположную сторону. Вращение от двигателя 18 через редуктор 17, .вал 9, шестерни 8 и 7 передается винту 6, вращение которого вызывает перемещение оси-гайки 5 и захватного элемента 4 с
5 полуосями 3 по участку б паза а в сторону, противоположную креплению цепи.
При дальнейшем перемещении оси-гайки 5 полуоси 3 входят на участок в паза а, а поверхность д захватного элемента 4 касается
20 упора 16, при этом происходит разворот захватного элемента 4, пока точка Д паза г не коснется оси-гайки 5 и не произойдет отключение двигателя 18 реле давления или реле тока.
25 Ручное управление стопором осуществляется при помощи маховика 19. При управлении стопором вручную взаимодействие его частей аналогично описанному выше.
0Предмет изобретения
Стопор для якорной цепи, содержащий корпус, выполненный с горизонтальной плитой и двумя вертикальными щеками с продольными пазами, в которых размещен захватный эле5 мент горизонтального звена цепи, кинематически связанный с винтовой парой, состоящей из приводного винта, закрепленного на подшипниках в корпусе, и оси-гайки, оконечности ко торой расположены в продольных пазах корпуса, о т л и ч а ю щ и и с я тем, что, с целью обеспечения механизированного освобождения или стопорения цепи автоматическим захватом при любом положении горизонтального звена относительно .корпуса стопора, продольные пазы корпуса переходят в наклонные по отношению к первоначальному направлению пазов, со стороны окончания которых на корпусе расположен упор, а на захватном элементе жестко установлены полуоси, пропущенные
0 в продольные пазы корпуса, и выполнен паз по радиусу с центром, расположенным на геометрической оси полуосей, через который пропущена ось-гайка, связанная с приводным винтом, причем кинематическая связь захватного
элемента с осью-гайкой выполнена в виде пружины сжатия, установленной в связанном с осью-гайкой стакане, шток которого шарнирно связан с нижней частью захватного элемента.
2
Фиг1
- 1 i W Д д 16
/
иг.г
| название | год | авторы | номер документа |
|---|---|---|---|
| Стопор для якорной цепи | 1981 |
|
SU998222A2 |
| Стопор для якорной цепи | 1977 |
|
SU662414A1 |
| РЕГУЛИРУЕМАЯ ОПОРА ДЛЯ СТРЕЛКОВОГО ОРУЖИЯ И СПОСОБ СТРЕЛЬБЫ С ЕЁ ПРИМЕНЕНИЕМ | 2016 |
|
RU2631156C1 |
| УСТРОЙСТВО ДЛЯ ФОРМОВАНИЯ БЕТОННЫХ ИЗДЕЛИЙ | 2009 |
|
RU2405672C1 |
| ПУСКОВОЕ УСТРОЙСТВО | 1991 |
|
RU2048654C1 |
| Устройство для измерения работы дизельных двигателей | 1988 |
|
SU1610320A1 |
| УСТРОЙСТВО ДЛЯ ДОСТАВКИ ПРИБОРОВ В ГОРИЗОНТАЛЬНУЮ СКВАЖИНУ | 2000 |
|
RU2175374C1 |
| Автооператор для смены инструментальных наладок | 1986 |
|
SU1426744A1 |
| ПОДВЕСНОЕ МАНИПУЛИРУЮЩЕЕ УСТРОЙСТВО С РУЧНЫМ УПРАВЛЕНИЕМ | 2014 |
|
RU2561559C1 |
| Устройство для сборки корпусных деталей с комплектующими | 1988 |
|
SU1511042A1 |