зирующего знак результата сравнения, а второй выход - с первым входом блока вычисления корректированного момента а/г, . Выходы блока, анализирующего знак результата, подключены к входам сумматора, а выход сумматора - к первому входу второго блока сравнения, второй вход которого соединен с выходом первой ячейки хранения постоянного числа т. Выход второго блока сравнения подсоединен к второму входу блока вычисления первого корректированного момента a,ki , третий вход которого связан с одним из выходов коммутатора, а выход - с одним из входов коммутатора. ОдИН из выходов коммутатора соединен с входом блока сравнения второго канала коррекции а„ , второй вход блока сравнения с выходом первой ячейки хранения постоянного числа k, а выход - с первым входом блока вычисления второго корректированного момента ccftj , второй вход которого подключен к выходу сумматора устройства, третий вход - к выходу второй ячейки хранения постоянного числа р, а выход - к одному из входов коммутатора. На чертеже представлена функциональная схема прогнозирующего вычислительного устройства с двумя каналами коррекции а„ и устройством диагностики. Устройство содержит блок 1 обегающего контроля, соединенный с функциональным блоком 2, коммутатор 3, блок 4 оперативной памяти, блок 5 внешней памяти, сумматор 6, блок 7 управления и последовательно соединенные блок 8 вычисления интеграла вероятности и регистратор 9. Первый канал коррекции включает в себя блок 10 сравнения, который осуществляет сравнение измеренного значения контролируемого параметра у„ , поступающего из блока 1, с его упрежде нным значением У„ , попадающим из блока 5, определяет ошибку прогноза А как А У„ -у„ и выделяет знак и модуль ошибки прогноза А. Блок 10 соединен с блоком И знака погрешности, который распределяет последовательность знаков А, поступающих на его вход по двум параллельным каналам «-f и «- в виде последовательности импульсов. Эту последовательность импульсов суммирует сумматор 12, если импульсы идут непрерывно (импульс в каждом цикле) по одному из каналов. Блок 13 сравнения осуществляет сравнение суммы, накопленной в сумматоре 12, с постоянным для данного процесса числом т, хранящимся в ячейке 14констант, соединенной с блоком 13. Блок 15коррекции производит вычисление значения корректированного момента по формуле , л «-1 схА, а„+А значение момента, вычисленное предыдущем цикле прогноза; количество выполненных циклов прогноза при условии, что сумма импульсов в блоке 13 равна или превышает /п. Второй канал коррекции состоит из блока 16 сравнения, который осуществляет сравнение количества выполненных циклов п прогноза с наперед заданным количеством циклов k, ячеек 17 и 18 хранения констант, блока 19 коррекции, производящего вычисление значения корректированного момента при выполнеНИИ условий n - k по формуле Y n+i + (а «4-1- Y «+1) Р. где р - коэффициент, учитывающий требование непрерывности исследуемого процесса и хранящийся в ячейке 18 констант. Работает предлагаемое устройство в следующей последовательности. Информация о значении параметра г/„ характеризующего текущее (в п-и момент времени) значение контролируемого параметра, через выход блока 1 обегающего контроля поступает одновременно на функциональный блок 2, через коммутатор 3 в блок оперативной 4 памяти и на блок 10. Последующая работа устройства на протяжении цикла прогноза значений контролируемого параметра осуществляется в восемь этапов. На первом этапе с блока 5 внешней памяти через коммутатор 3 в блок 4 оперативной памяти записывается номер цикла прогноза п, а в блок 10 сравнения - значение У„ (в первом цикле прогноза У„ 0). определяется ошибка прогноза А, знак который sign А через блок И поступает в сумматор 12, а модуль проходит в блок 15 для вычисления сс/е, . На втором этапе с блока 5 через коммутатор 3 поступает значение а„ в блок, 2, где вычисляется значение cxn+i по формуле J I Уп -L где а„ , a/i+i - статистические моменты, определяющие реализацию многомерной случайной функции состояния контролируемого параметра в п-й и (п.+ 1)-й точках. Вычисленное значение ал-ы через коммутатор 3 записывается в блок 4. На третьем этапе, аналогично предыдущему, вычисляется значение параметра Тя.1 Т«- которое через коммутатор 3 записывается в блок 4. На четвертом этапе с блока 5 через коммутатор 3 записывается в блок 2 параметр У„ и вычисляется квадрат разности (Уп-Уп}. На пятом этапе с блока 5 через коммутатор 3 записывается в блок 2 параметр сг , характеризующий точность (дисперсию) предсказания параметра в п-й точке, в результате чего вычисляется параметр
(Уп-УпУ
n+
02 «+2 n-1
характеризующий точность прогноза в (n+ 4-1)-й точке. Вычисленное значение о.; через коммутатор 3 записывается в блок 4.
На шестом этапе параметры «n+i блока 4 через коммутатор 3 записываются в блок 2 и вычисляется параметр
У„+, 2(Y«+i-OCre+l)
характеризующий предсказанное значение контролируемого параметра в (п + 1)-й точке.
Вычисленное значение УП+J через коммутатор 3 записывается в блок 4.
На седьмом этапе параметры c6«+i , v+i с блока 4 через коммутатор 3 записываются в блок 10 и одновременно значение п - в блок 16. При выполнении условия n - k проводится вычисление момента, корректирующего а„ по формуле
a,k +1 + («a+i-Y ra+i) РРеализация коррекции ал позволяет значительно повысить точность прогнозирования в результате «уплотнения предыстории за счет того, что «уплотненная предыстория сочетает в себе полноту информации неограниченной предыстории с точным учетом изменений в тенденциях развития процессов на последующих циклах прогнозирования.
Вычисленное значение ССА через коммутатор 3 записывается в блок 4 взамен хранящегося там значения .
На восьмом этапе командой блока 7 управления осуществляются считывание параметров г/„, Уп+ , блока 4 и запись их через коммутатор 3 в блок 8, где производится вычисление вероятности выхода контролируемого параметра из зоны допусков Р по формуле
где Удоп - допустимое значение контролируемого параметра; с последующей печатью значений У„+1 , , РОдновременно считанные значения Y «+1. УП+I , сГл4- записываются через коммутатор 3 в блок 5, при этом в сумматоре 6 номер цикла возрастает на единицу. На этом цикл прогноза заканчивается.
В каждом последующем цикле прогноза на первом этапе продолжается анализ ошибки прогноза Д. Нри совпадении sign Д любых двух соседних прогнозов, значение суммы, находящейся в блоке 12, возрастает. Повторяющееся совпадение sign Д свидетельствует о появлении систематической ошибки прогноза.
которая, при данном методе прогнозирования, возникает в момент изменения тенденции развития процесса. При выполнении условии 2 sign Д /г производится коррекция момента а„по формуле
, .
Реализация коррекции а/ц позволяет осуществить расщирение функциональных возможностей устройства в результате учета повторяющихся знаков ощибок прогноза путем непрерывного контроля тенденций развития процесса с введением коррекции по мере появления изменений в тенденции процесса. Вычисленное значение а/г, через коммутатор 3 записывается в блок 5 взамен хранящегося там значения а„ .
Появление чередующейся (первый цикл -
импульс на одном выходе блока 11, второй цикл - импульс на втором выходе блока 11 и т. д.) последовательности импульсов на выходе блока II свидетельствует о том, что прогнозируемые значения контролируемых параметров весьма близки к измеренным и поэтому введение коррекции а „ не требуется. При этом в сумматоре 12 не происходит накопления суммы, так как каждый импульс, соответствующий з1дпД полярности, противоположной той, которая была записана в предыдущем цикле, устанавливает сумматор в единичное положение независимо от суммы, записанной в нем па предыдущем цикле.
35
Предмет изобретения
Прогнозирующее вычислительное устройство, содержащее блок обегающего контроля, соединенный с ним блок вычисления вероятностных параметров, коммутатор, блок оперативной памяти, соединенный через сумматор с блоком внешней памяти, блок управления и последовательно соединенные блок вычисления интеграла вероятности и регистратор, отличающееся тем, что, с целью повышения точности прогнозирования, устройство содержит два .канала коррекции, причем выход блока обегающего контроля соединен с первым входом первого блока сравнения первого канала
коррекции, второй вход которого соединен с одним из выходов коммутатора, первый выход первого блока сравнения соединен с первым входом блока анализа знака результата сравнения, а второй выход соединен с первым входом блока вычисления первого корректированного момента, выходы блока анализа знака результата сравнения соединены с входами сумматора, выход которого соединен с первым входом второго блока сравнения, второй вход
которого соединен с выходом ячейки хранения постоянного числа, выход второго блока сравнения соединен с вторым входом блока вычисления первого корректированного момента, третий вход которого соединен с одним из
выходов коммутатора, а выход соединен с од7
ним из входов коммутатора; во втором канале коррекции один из выходов коммутатора соединен с входом блока сравнения, второй вход блока сравнения соединен с выходом первой ячейки хранения постоянного числа, а выход соединен с первым входом блока вы8
числения второго корректированного момента, второй вход которого соединен с выходо М сумматора устройства, третий вход соединен с выходом второй ячейки хранения ностоянного числа, а выход соединен с одним из входов коммутатора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Прогнозирующее вычислительное устройство | 1975 |
|
SU532104A1 |
| Устройство для диагностики и прогнозирования отказов | 1989 |
|
SU1629898A1 |
| Цифровой нерекурсивный фильтр | 1985 |
|
SU1352622A1 |
| Цифровой нерекурсивный фильтр нечетного порядка | 1985 |
|
SU1314445A1 |
| Устройство для контроля пара-METPOB | 1978 |
|
SU798870A1 |
| Цифровой согласованный фильтр для импульсных эхо-сигналов | 1981 |
|
SU964979A1 |
| Система контроля уровня расплава по окружности горна доменной печи | 1987 |
|
SU1447858A1 |
| Устройство для контроля и регулирования параметров | 1984 |
|
SU1249491A1 |
| УСТРОЙСТВО для ПРОФИЛАКТИЧЕСКОЙ ДИАГНОСТИКИ | 1973 |
|
SU386399A1 |
| Устройство для контроля и управления технологическим процессом тренировки и испытаний фотоэлектронных умножителей | 1986 |
|
SU1325516A1 |
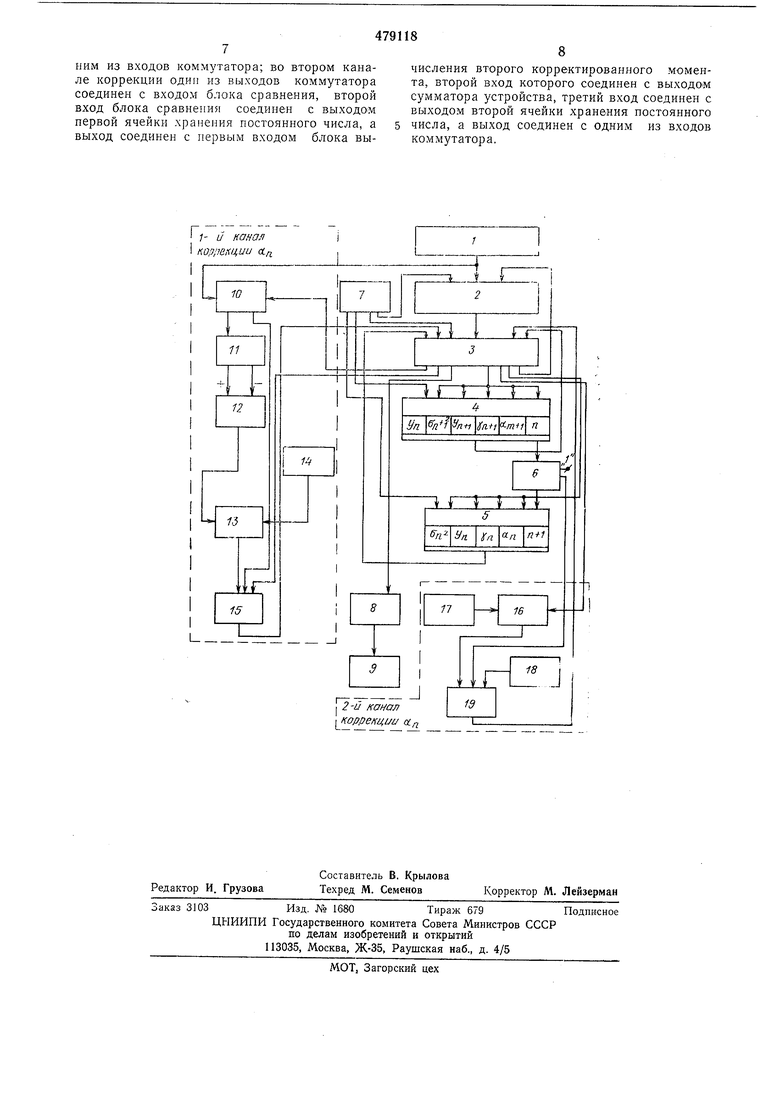
I /- и канал KOpimKnuu oLfi
I 2-й канал oflpeKi4uu се.п
