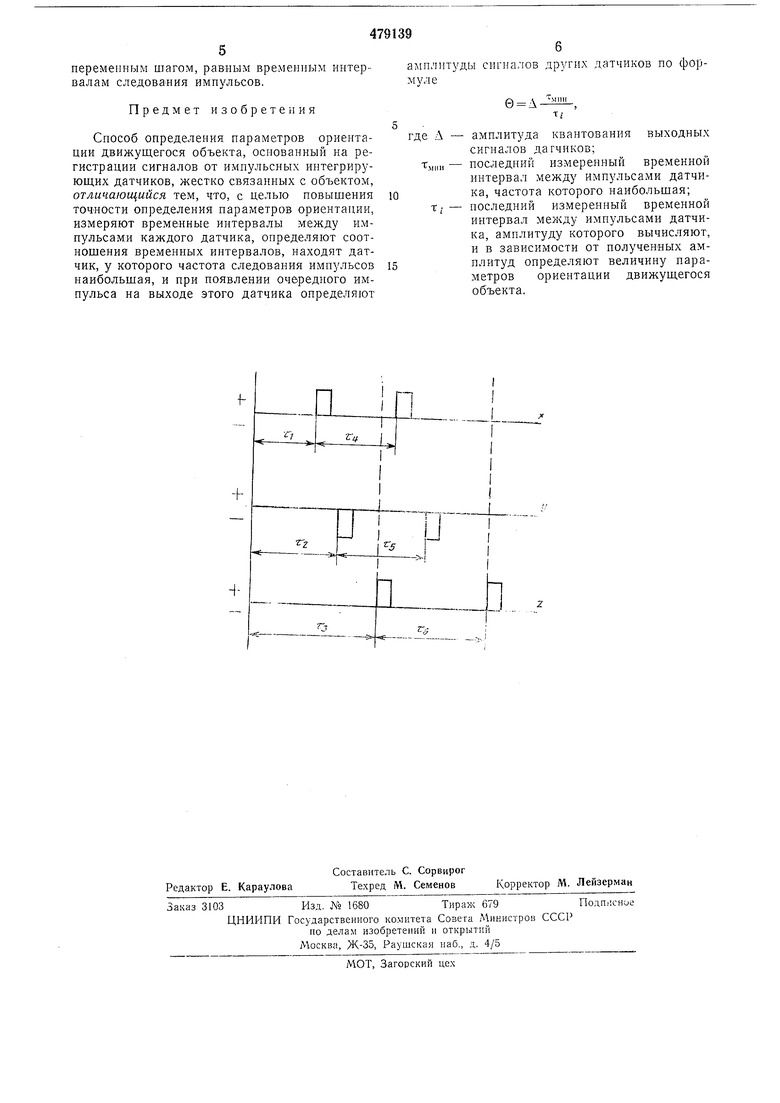
частотой, равной частоте следования импульсов датчика, измеряют временные интервалы Ть Т2, Тз следования нервых импульсов и вычисляют сигналы @х,з и в .,3 , которые отсутствуют на выходах датчиков X н У в момент времени , соответствующий моменту появления первого импульса на выходе датчика Z, по формулам 0,, в,,,з -Агде А - постоянный уровень квантования сигналов. В момент времени / тз+-Гб, соответствующий моменту времени появления второго импульса на выходе датчика Z, сигналы датчиков X i Y после измерения интервалов ;, Т5, Тб вычисляют по формулам Ди так далее. Сигналы, которые должны были бы поя виться в результате интегрирования проекций вектора угловой скорости со за время тз на выходах датчиков X, Y к Z, можно с помощью ряда Тейлора представить в виде Bjr,3 I СОл:,ЗТз СОл:,3ll- + О (т 3 ); + 0(т|); ),,3 1 со vuf/ CO г/,зТз-0)(/,3 Тз 0гЗ I A, где (Олг.з и (Oj,,3 - проекции вектора угловой скорости на оси чувствительности датчиков X и Y, соответствующие моменту времени Мд:,з и сойз - первые производные по времени от проекций вектора угловой скорости, соответствующие также моменту времени 0(т;3 ) порядок погрешности представления сигналов датчиков в виде (4); д - уровень квантования сигналов. Проекцию юх,з вектора угловой скорости в момент времени можно выразить через проекцию вектора угловой скорости в момент времени t Ti с помощью ряда Тейлора в виде со V 6 со V. 1 -(О .V, I (Тз-TI ) + со .V, I (Тз-Т ) + + 0(тз-т,)з.(5) Аналогичным образом получается выражениеС0;/,3 .2-со (/,2 (Тз-Т2)+СО,/,2 (Тз-Т2) + Ч-(Тз-Т2)1(6) проекции вектора угловой скорости co.i и со ,,,2, в свою очередь, можно найти из выраений, также получаемых с помощью ряда Тейлора 1 со ru/ A CO,v iTi+ С0л: 1 + 0(т); 0 2 i r -w2 j CO ,,Л ,2T2 + COг,,2+ 0(т|), (7) 0 И представить в виде W.v.lЫх,(т2). (т|). Из (4), (5), (6) и (8) следует формулы (2). Погрещности формул (2), определяющие точность предлагаемого способа определения параметров, оцениваются выражениями бв,.1 Тз(тз TTl)-С0л:,1 (ТзTl) + + 0(т«). Г2)-СО,/,2 (Тз-Т2) + бву.З СО I/.2Tз(тs2+ 0(гЗ); Выражения (9) показывают, что при уровне квантования Д, имеющем такой же порядок малости, как и временные интервалы следования импульсов, т. е. А 0(т), абсолютные погрешности получаемых синхронных сигналов имеют порядок малости, равный О(А), а относительные погрешности - порядок малости, равный О (А). Например, при уровне квантования А относительные погрешности квантованных по времени сигналов имеют величину порядка 0,01%, что уже соответствует точности лучших современных датчиков угловой скорости. Точность предлагаемого способа будет наибольшей, если отношения временных интервалов в формуле (1) меньше единицы. Предлагаемый способ позволяет пе только повысить точность квантованных по времени сигналов при заданном уровне квантования импульсных сигналов, но и увеличить уровень квантования импульсных сигналов датчиков при заданной точности квантования по времени, т. е. снизить требования к уровням квантования выходных сигналов импульсных датчиков угловой скорости, что, в свою очередь, позволяет уменьщить объем вычислений в БЦВМ, необходимых для определения пара метров ориентации. Для вычисления параметров ориентации с; использованием квантованных по времени сигналов по предлагаемому способу могут быть при.менены вычислительные методы более точные, чем методы первого порядка, используемые при вычислении параметров ориентации с максимальной частотой следования нмпульсов. При этом вычисления параметров ориентации по сигналам, получаемым по предлагаемому способу, должны осуществляться с
переменным шагом, равным временным интервалам следовалия импульсов.
Предмет изобретения
Способ определения параметров ориентации движущегося объекта, основанный на регистрации сигналов от импульсных интегрирующих датчиков, жестко связанных с объектом, отличающийся тем, что, с целью повыщения точности определения параметров ориентации, измеряют временные интервалы между импульсами каждого датчика, определяют соотношения времеппых интервалов, находят датчик, у которого частота следования импульсов наибольшая, и при появлении очередного импульса на выходе этого датчика определяют
амплитуды сигналов других датчиков по формуле
0 Ае А
амплитуда квантования выходных сигналов дагчиков; последний измеренный временной
С мин интервал между импульсами датчика, частота которого наибольшая; последний измеренный временной
Т; интервал между импульсами датчика, амплитуду которого вычисляют, и в зависимости от полученных амплитуд определяют величину параметров ориентации движущегося объекта.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ НАЧАЛЬНОЙ ВЫСТАВКИ БЕСПЛАТФОРМЕННОГО ИНЕРЦИАЛЬНОГО БЛОКА УПРАВЛЯЕМОГО ОБЪЕКТА | 2007 |
|
RU2348010C1 |
| СПОСОБ УПРАВЛЕНИЯ ОРИЕНТАЦИЕЙ СОЛНЕЧНОЙ БАТАРЕИ КОСМИЧЕСКОГО АППАРАТА С ЗАЩИТОЙ ОТ КРАТКОВРЕМЕННЫХ СБОЕВ ИНФОРМАЦИИ ОБ УГЛОВОМ ПОЛОЖЕНИИ СОЛНЕЧНОЙ БАТАРЕИ | 2012 |
|
RU2509692C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТА КОМАНДЫ ОДНОКАНАЛЬНЫХ ВРАЩАЮЩИХСЯ РАКЕТ И СНАРЯДОВ С РЕЛЕЙНЫМ РУЛЕВЫМ ПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2574500C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ УПРАВЛЯЕМОГО АППАРАТА, ПОДВЕШЕННОГО К САМОЛЕТУ-НОСИТЕЛЮ | 2014 |
|
RU2553776C1 |
| СПОСОБ МНОГОКАНАЛЬНОЙ ПЕРЕДАЧИ И ПРИЕМА ДИСКРЕТНЫХ СИГНАЛОВ | 2017 |
|
RU2713919C2 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ РАЗГОННОГО БЛОКА В КОНЦЕ МАНЕВРА | 2010 |
|
RU2432596C1 |
| ЭЛЕКТРОСТАТИЧЕСКИЙ ГИРОСКОП С ОПТИЧЕСКИМ СЧИТЫВАНИЕМ ПОЛОЖЕНИЯ ОСИ РОТОРА И СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ ОСИ РОТОРА | 2013 |
|
RU2531060C1 |
| СПОСОБ КАЛИБРОВКИ ПАРАМЕТРОВ БЕСПЛАТФОРМЕННОГО ИНЕРЦИАЛЬНОГО ИЗМЕРИТЕЛЬНОГО МОДУЛЯ | 2004 |
|
RU2269813C2 |
| Устройство для измерения параметров линейно-частотно-модулированных сигналов | 1990 |
|
SU1734033A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОГРЕШНОСТЕЙ ИНЕРЦИАЛЬНЫХ ИЗМЕРИТЕЛЬНЫХ ПРИБОРОВ ПРИ ИСПЫТАНИЯХ НА УДАРНЫЕ И ВИБРАЦИОННЫЕ ВОЗДЕЙСТВИЯ | 2013 |
|
RU2545489C1 |
