Изобретение относится к области приборостроения и может быть использовано при выставке бесплатформенных инерциальных навигационных систем управляемого аппарата (БИНС УА).
Известен способ (патент RU 2348010 C1, МПК G01C 21/16, опубл. 27.02.2009) определения начальной выставки приборной системы координат бесплатформенного инерциального блока (БИБ) управляемого объекта, установленного на пусковой установке (ПУ), относительно базовой (стартовой) системы координат, материализованной стабилизированной платформой курсовертикали (KB), также установленной на ПУ. Сущность данного способа заключается в том, что осуществляют разворот пусковой установки с БИБ и выставку ее на первые заданные углы возвышения и азимута; проводят измерения акселерометрами БИБ в малоподвижном относительно Земли положении пусковой установки на интервале времени от t0 до tn; определяют в вычислительном устройстве (ВУ) n приращений каждой из проекций вектора кажущейся скорости (ВКС) на оси приборной системы координат (ПСК) за известные заданные интервалы времени от t0 до tj (j=1, …, n) и получают проекции ВКС на оси ПСК; проводят оценку каждой полученной проекции ВКС на оси ПСК и рассчитывают оценку каждой проекции вектора кажущегося ускорения (ВКУ) на оси ПСК; по оценкам проекций ВКУ прогнозируют на некоторый заданный момент времени Т1 значение каждой проекции ВКУ на оси ПСК; выполняют измерения датчиками углов курсовертикали на том же интервале времени от t0 до tn и определяют n значений каждого из углов Эйлера; проводят оценки каждого из углов Эйлера, по полученным оценкам углов Эйлера прогнозируют значение углов Эйлера на тот же заданный момент времени Т1, по полученным значениям углов Эйлера определяют угловое положение связанной системы координат (ССК) относительно БСК; по показаниям акселерометров курсовертикали определяют проекции ВКУ на оси БСК; по угловому положению ССК относительно БСК и проекциям ВКУ на оси БСК определяют проекции ВКУ на оси ССК; затем осуществляют разворот пусковой установки с БИБ и выставляют ее на вторые заданные углы возвышения и азимута; по сигналам с акселерометров БИБ, а также сигналам акселерометров и датчиков углов курсовертикали, повторяя те же операции, что и на первых углах возвышения и азимута, в ВУ определяют проекции второго ВКУ на оси ПСК и ССК на другой заданный момент времени Т2 и угловое положение ССК относительно БСК; по полученным значениям проекций двух векторных величин - двух ВКУ на оси ПСК и ССК определяют в ВУ угловое положение ПСК относительно ССК и, учитывая известное угловое положение ССК относительно БСК, выполняют вышеуказанное определение углового положения ПСК относительно БСК; по спрогнозированным на заданный другой момент времени Т2 проекциям ВКУ на оси ПСК уточняют в ВУ угловое положение ПСК относительно плоскости горизонта базовой (стартовой) системы координат.
Недостатком данного способа является невозможность использования его для выставки БИНС управляемого аппарата в полете от базовой ИНС носителя.
Известен также способ, описанный в статье Савельева В.М., Антонова Д.А. Выставка бесплатформенной инерциальной навигационной системы беспилотного летательного аппарата на подвижном основании. Электронный журнал «Труды МАИ», выпуск №45 (принятый нами за прототип).
Согласно известному способу начальная выставка БИНС управляемого аппарата (УА), в частности беспилотного летательного аппарата (БПЛА), осуществляется путем совместной обработки методом фильтрации Калмана углов курса, крена, тангажа, а также скоростей и координат самолета-носителя (СН) и закрепленного на внешней подвеске БПЛА.
Недостатком данного способа является длительное время, порядка нескольких минут, требуемое для оценки углов рассогласования между осями связанных систем координат СН и закрепленного на внешней подвеске БПЛА, что не приемлемо для выставки БИНС боевого управляемого аппарата.
Целью предлагаемого изобретения является обеспечение возможности определения углов рассогласования осей связанных систем координат УА и СН в полете, которые используются для начальной выставки, за короткое время (не более 5 сек) и с требуемой точностью.
Поставленная цель достигается за счет того, что согласно заявляемому способу определения углового положения управляемого аппарата (УА), подвешенного к самолету-носителю (СН), использующему выходные сигналы бесплатформенной инерциальной системы (БИНС) УА и БИНС СН для совместной обработки методом фильтрации Калмана, в качестве выходных сигналов БИНС используют сигналы, соответствующие угловым скоростям, измеренным трехкомпонентными датчиками угловых скоростей (ДУС), установленными на УА и СН, причем измерение угловых скоростей производят с использованием маневра СН типа «змейка», и на их основе, путем согласования векторов угловых скоростей УА и СН, осуществляют определение углов рассогласования векторов угловой скорости УА и СН.
Для определения ориентации изделия относительно носителя, т.е. привязки осей, необходимо определить матрицу поворота, определяемую тремя углами рассогласования осей координат БИНС УА и СН. Их определение выполняют путем согласования векторов угловых скоростей УА и СН.
Для этого в БИНС УА должны поступать сигналы измерения угловых скоростей СН с частотой не менее 20 Гц. При этом СН в течение 5 секунд должен выполнять маневр типа «змейки», или ее части, с амплитудой угловых скоростей по курсу и крену порядка 7-10 [град/с].
Определение углов рассогласования начинается по команде о начале маневра, поступающей в вычислитель УА, и заканчивается через 5 секунд. Правильность решения контролируется по величине остаточной ошибки рассогласования векторов угловых скоростей.
Определение углов рассогласования выполняется путем дискретного оценивания вектора состояния, состоящего из трех искомых углов, для которого задается априорное нормальное распределение. Основные положения способа следующие.
Определяемый вектор состояния принимается в виде
Здесь ψ - угол рассогласования осей по рысканию, ϑ - угол рассогласования осей по тангажу, γ - угол рассогласования осей по крену, i - номер дискретного момента времени измерений, отсчитываемый от момента начала маневра.
Обозначим: ωх1, ωy1, ωz1 - угловые скорости самолета носителя; ωх2, ωy2, ωz2 - угловые скорости БИНС УА. Вектор наблюдений угловых скоростей БИНС УА, обозначаемый Z, связан с вектором угловых скоростей СН с помощью матрицы поворота, обозначаемой Е:
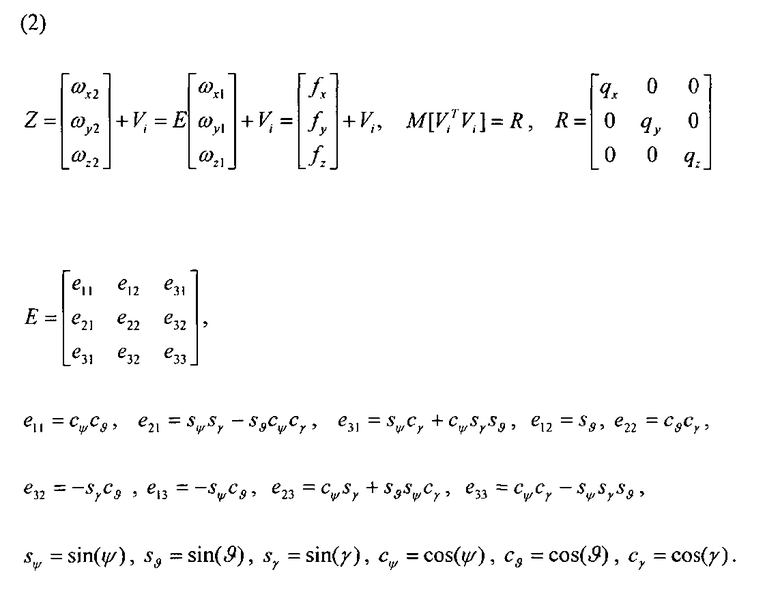
Здесь Vi - вектор ошибок измерений с ковариационной матрицей R.
Компоненты вектора (1) полагаются случайными величинами, а процессы их изменения марковскими.
Дискретные модели их измерения описываются стохастическими разностными уравнениями первого порядка.

Здесь Tψ, Тϑ, Тγ - постоянные времени корреляции; wψi, wϑi, wγi - случайные процессы дискретного белого шума с заданной ковариационной матрицей Q
 .
.
Матрица дискретной модели объекта имеет вид
Матрица Якоби вектора наблюдений Z имеет вид
 .
.
Здесь fx, fy, fz - функции, указанные в (2).
Ставится задача оценивания вектора (1) по наблюдениям (2) при условии заданных ковариационных матриц R, Q и априорного распределения 
Процесс определения углов рассогласования осей представим пошагово:
Шаг 0.
Задание априорного распределения: 
Шаг 1.
Начало цикла фильтрации по команде начала маневра.
Ввод очередного отсчета измерений ДУС БИНС УА и ДУС БИНС СН.
Шаг 2.
Прогноз математического ожидания вектора (1) решением уравнений (3) при wψi=0, wϑi=0, wγi=0.
Шаг 3.
Формирование матриц F и Н по (4) и (5).
Шаг 4.
Прогноз ковариационной матрицы.
Шаг 5.
Определение коэффициента усиления фильтра.

Шаг 6.
Определение апостериорной ковариационной матрицы.

Шаг 7.
Определение оценки вектора измерений 
Шаг 8.
Определение невязки. 

Шаг 9.
Определение вектора рассогласования угловых скоростей СН и БИНС УА.
Шаг 10.
Рекурсия апостериорного распределения.


Шаг 11.
Переход к шагу 1 при условии, что время фильтрации не истекло.
Шаг 12.
Контроль правильности решения проверкой малости среднего модуля рассогласования угловых скоростей 
Таким образом, использование изобретения позволяет привести в готовность управляемый аппарат за короткое время, в частности не превышающее 5 секунд, с требуемой точностью.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ НАЧАЛЬНОЙ ВЫСТАВКИ БЕСПЛАТФОРМЕННОГО ИНЕРЦИАЛЬНОГО БЛОКА УПРАВЛЯЕМОГО ОБЪЕКТА | 2007 |
|
RU2348010C1 |
| АВТОНОМНЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ НАЧАЛЬНОЙ ОРИЕНТАЦИИ ПРИБОРНОЙ СИСТЕМЫ КООРДИНАТ БЕСПЛАТФОРМЕННОГО ИНЕРЦИАЛЬНОГО БЛОКА УПРАВЛЯЕМОГО ОБЪЕКТА ОТНОСИТЕЛЬНО БАЗОВОЙ СИСТЕМЫ КООРДИНАТ | 2008 |
|
RU2386107C1 |
| СПОСОБ КАЛИБРОВКИ ЧУВСТВИТЕЛЬНЫХ ЭЛЕМЕНТОВ БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ В ПОЛЕТЕ | 2012 |
|
RU2486472C1 |
| Способ идентификации углов рассогласования БИНС управляемого аппарата и ИНС самолета-носителя | 2022 |
|
RU2790083C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАЧАЛЬНОЙ ВЫСТАВКИ БЕСПЛАТФОРМЕННОГО ИНЕРЦИАЛЬНОГО БЛОКА ОТНОСИТЕЛЬНО БАЗОВОЙ СИСТЕМЫ КООРДИНАТ | 2004 |
|
RU2279635C2 |
| Способ выставки БИНС ЛА корабельного базирования и устройство для его осуществления | 2016 |
|
RU2635398C2 |
| СПОСОБ ПОВЫШЕНИЯ ТОЧНОСТИ НАВЕДЕНИЯ ДОВОДОЧНЫХ СТУПЕНЕЙ РАЗЛИЧНОГО НАЗНАЧЕНИЯ | 2010 |
|
RU2440557C9 |
| Адаптивный корректор углов ориентации для БИНС | 2020 |
|
RU2749152C1 |
| БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ КУРСОВЕРТИКАЛЬ | 2014 |
|
RU2564379C1 |
| СПОСОБ КАЛИБРОВКИ ЧУВСТВИТЕЛЬНЫХ ЭЛЕМЕНТОВ БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2334947C1 |
Заявляемое изобретение относится к области приборостроения и может быть использовано при выставке бесплатформенных инерциальных навигационных систем (БИНС) управляемого аппарата (УА). Способ включает в себя предварительную обработку сигналов, соответствующих угловым скоростям, измеренным трехкомпонентными датчиками угловых скоростей (ДУС), установленными на УА и самолете-носителе (СН), на маневре СН типа «змейка», основанную на применении метода фильтрации Калмана. При поступлении в вычислитель УА соответствующей команды СН выполняет маневр типа «змейки», при этом начинается выполнение согласования векторов измерений ДУС УА и ДУС СН, по которому минимизируется взвешенная среднеквадратическая ошибка рассогласования измерений ДУС УА относительно измерений ДУС СН. Процесс согласования является рекуррентным. На каждом шаге используются текущие измерения сигналов датчиков, и вычисляется очередное приближение матрицы поворота, определяющей рассогласование осей блока ДУС УА относительно осей блока ДУС СН. В случае отсутствия ошибок измерений процесс завершается полным согласованием осей блоков, при котором измерения ДУС УА точно пересчитываются в измерения ДУС СН. По окончательной матрице поворота вычисляются результирующие оценки углов рассогласования между осями ДУС УА и ДУС СН, которые и определяют ориентацию изделия относительно носителя. Изобретение позволяет привести в готовность УА за короткое время, в частности не превышающее 5 секунд, с требуемой точностью.
Способ определения углового положения управляемого аппарата (УА), подвешенного к самолету-носителю (СН), использующий выходные сигналы бесплатформенной инерциальной системы (БИНС) УА и БИНС СН для совместной обработки методом фильтрации Калмана, отличающийся тем, что в качестве выходных сигналов БИНС используют сигналы, соответствующие угловым скоростям, измеренным трехкомпонентными датчиками угловых скоростей (ДУС), установленными на УА и СН, причем измерение угловых скоростей производят с использованием маневра СН типа «змейка», и на их основе, путем согласования векторов угловых скоростей УА и СН, осуществляют определение углов рассогласования векторов угловой скорости УА и СН.
| СПОСОБ ОПРЕДЕЛЕНИЯ НАЧАЛЬНОЙ ВЫСТАВКИ БЕСПЛАТФОРМЕННОГО ИНЕРЦИАЛЬНОГО БЛОКА УПРАВЛЯЕМОГО ОБЪЕКТА | 2007 |
|
RU2348010C1 |
| КОМПЛЕКСНАЯ СИСТЕМА ПОДГОТОВКИ И НАВИГАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2434202C1 |
| КОМПЛЕКСНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2000 |
|
RU2178147C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАВИГАЦИОННЫХ ПАРАМЕТРОВ БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМОЙ | 2007 |
|
RU2348903C1 |
| НЕУСЫПИН К.А | |||
| Современные системы и методы наведения, навигации и управления летательными аппаратами | |||
| Изд | |||
| МГОУ, 2009, с.91; 156, 158-159 | |||

