Предлагаемое изобретение относится к области, связанной с управлением движением разгонного блока (РБ) при выведении его на заданную орбиту.
Наиболее близким техническим решением является способ управления, применяемый в системе управления РБ, при котором перед началом маневра выполняют разворот РБ по тангажу и курсу до достижения ориентации, определяемой величинами заданных в полетном задании (ПЗ) начальных углов программ изменения тангажа и курса на маневре, и на этой ориентации стабилизируют продольную ось РБ до момента начала отработки заданной программы ориентации, считывают из ПЗ данные по параметрам управления и формируемой на маневре орбите РБ, в заданные в ПЗ времена включают на оговоренный в ПЗ интервал времени двигатели коррекции импульса для поджатия топлива в баках, запускают маршевый двигатель (МД), спустя фиксированный момент времени после запуска МД начинают отработку заданной в ПЗ программы ориентации РБ, корректируют программу ориентации с помощью терминального управления для обеспечения формирования орбиты с заданными в ПЗ параметрами, выключают МД по достижению заданного функционала энергии, а за установленный интервал времени до этого фиксируют программу ориентации с параметрами, полученными после последней корректировки. За определенный момент времени до отключения МД включают режим ожидания его отсечки, при котором программа ориентации замораживается и РБ стабилизируется относительно зафиксированного направления [1].
Основой терминального управления является периодически реализуемый прогноз движения РБ с текущей программой ориентации в виде линейных по времени изменений углов рыскания (ψ) и тангажа (ϑ), определяемых в инерциальной системе координат выведения, связанной с начальной точкой маневра:
ϑ=a+b·t,
ψ=c+d·t,
где а, с - начальные значения углов тангажа и курса;
b, d - угловые скорости изменения углов тангажа и курса.
В прогнозируемый момент выключения МД вычисляются параметры, определяющие отклонения от формируемой орбиты. В продольном канале управления к их числу относятся отклонения по радиусу ΔR и по радиальной скорости ΔV, а в боковом - отклонение от плоскости орбиты ΔRb и скорость его изменения ΔVb. По этим данным определяются поправки к текущей программе ориентации РБ, обеспечивающие компенсацию указанных выше отклонений.
Погрешности компенсаций отклонений от заданной орбиты зависят от отличия расчетных и фактических функций чувствительности этих отклонений на изменение параметров программы ориентации, а также от динамических характеристик систем управления и стабилизации. Кроме того, при больших начальных отклонениях при ограниченном количестве тактов терминального управления процесс отработки начальных отклонений может быть не законченным. На практике могут быть короткие маневры, на которых терминальное управление не может быть реализовано. В этих случаях выполняется полет по жесткой некорректируемой программе ориентации с параметрами, заданными в ПЗ. Все эти факты сказываются на точностях формирования орбит, то есть на методических погрешностях управления, и определяют недостаток описываемого способа управления РБ.
Техническим результатом изобретения является повышение методической точности формирования заданной орбиты путем коррекции направления вектора тяги МД в конце маневра после перехода в режим ожидания отсечки МД, выполняемый за установленный интервал времени Тож до прогнозируемого момента его выключения. На этом этапе полета решение задачи по корректировке направления вектора тяги МД реализуется путем определения и отработки значений углов тангажа и курса, требуемых для обеспечения компенсации отклонений ΔV и ΔVb на момент отключения МД, так как погрешность формирования орбиты определяется в первую очередь именно скоростными отклонениями.
Для решения поставленной задачи используются Гринвичская геоцентрическая инерциальная система координат (ГИСК), инерциальная система координат выведения (ИСКВ) и орбитальная система координат (ОСК).
Указанный технический результат достигается тем, что в известный способ управления движением РБ в конце маневра, заключающийся в том, что перед началом маневра выполняют разворот РБ по тангажу и курсу до достижения ориентации, определяемой в ПЗ начальными значениями углов программы ориентации на маневре, стабилизируют на этом направлении продольную ось РБ до момента начала отработки заданной программы ориентации, включают на оговоренный в ПЗ интервал времени двигатели коррекции импульса для поджатия топлива в баках, запускают МД, спустя фиксированный момент времени после запуска МД начинают отработку программы ориентации РБ, корректируют программу ориентации с помощью терминального управления, в установленные интервалы времени до отключения МД последовательно фиксируют программу ориентации, переходят в режим ожидания отсечки МД и выключают МД по достижению заданного функционала энергии, дополнительно после перехода в режим ожидания отсечки МД по двум последовательно измеренным значениям векторов скорости, радиус-вектора РБ и кажущегося ускорения определяют текущие значения отклонений по скорости в радиальном и ортогональном направлении, вычисляют оставшийся интервал времени до достижения заданного функционала энергии и требуемые значения радиального и ортогонального ускорений для отработки этих скоростных отклонений на данном интервале, используя вычисленные значения радиального и ортогонального ускорений и значение модуля измеренного кажущегося ускорения, определяют величину третьей трансверсальной составляющей требуемого ускорения, пересчитывают полученные составляющие ускорения в ИСКВ, вычисляют по ним требуемую в этой системе ориентацию тяги МД по углам тангажа и курса, обеспечивающую компенсацию отклонений по радиальной и ортогональной составляющей скорости, и разворачивают продольную ось РБ в направлении вычисленной ориентации.
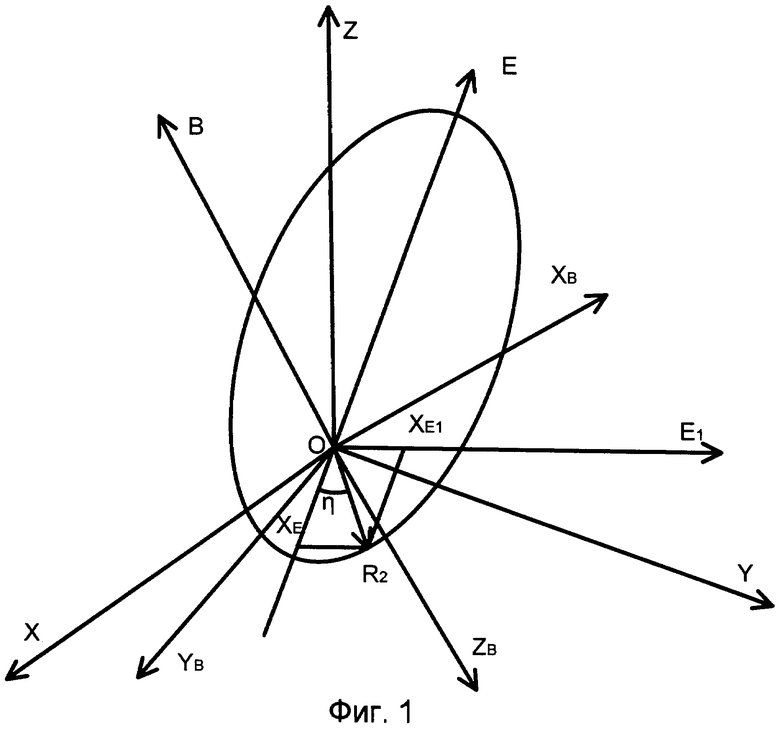
На фиг.1 представлены системы координат ГИСК (OXYZ), ОСК (OE1EB), ИСКВ (ОХВYВZB) и положение РБ, определенное радиус-вектором OR2, на фиг.2 - графики изменений вычисленных ΔV, ΔVb и требуемых ΔVтр, ΔVbтр скоростных отклонений РБ в продольном и боковом каналах управления.
Предложенный способ управления движением разгонного блока в конце маневра реализуется следующим образом.
В ГИСК определяют параметры движения РБ: вектора кажущегося ускорения  , скорости
, скорости  и радиуса
и радиуса  . Начало этой системы координат находится в центре Земли, ось ОХ находится в плоскости нулевого меридиана и направлена в точку его пересечения с экватором, ось OZ направлена на Северный полюс, а ось OY образует правую систему координат. Положение ГИСК замораживается в момент старта ракеты-носителя.
. Начало этой системы координат находится в центре Земли, ось ОХ находится в плоскости нулевого меридиана и направлена в точку его пересечения с экватором, ось OZ направлена на Северный полюс, а ось OY образует правую систему координат. Положение ГИСК замораживается в момент старта ракеты-носителя.
Ось OYB ИСКВ направлена из центра Земли в выбранную точку расчетной траектории полета РБ, ось ОХB перпендикулярна оси OYB и направлена в расчетном направлении движения, а ось OZB - дополняет систему координат до правой.
Ориентация ИСКВ относительно ГИСК определяется матрицей перехода от ГИСК к ИСКВ МГИ, элементы которой являются проекциями  ,
,  ,
,  единичных ортов осей ИСКВ на оси ГИСК и задаются в ПЗ.
единичных ортов осей ИСКВ на оси ГИСК и задаются в ПЗ.
Начало ОСК находится в центре Земли, и ее ориентация относительно ГИСК задается в ПЗ проекциями единичных ортов  ,
,  ,
,  , совпадающими по направлению с векторами Лапласа и кинетического момента заданной орбиты (фиг.1).
, совпадающими по направлению с векторами Лапласа и кинетического момента заданной орбиты (фиг.1).
Кроме этого из ПЗ также используются значения фокального параметра орбиты Fp, ее эксцентриситета Ех и заданного функционала энергии Fотс, при достижении которого выполняется выключение МД.
После прохождения команды на переход в режим ожидания отсечки МД в двух последовательных моментах времени измерения T1 и Т2 фиксируют информацию в ГИСК о векторе кажущегося ускорения  от работы МД, о радиус-векторе
от работы МД, о радиус-векторе  и векторе абсолютной скорости
и векторе абсолютной скорости  . Для каждого i-го момента (T1, Т2) вычисляют следующие параметры:
. Для каждого i-го момента (T1, Т2) вычисляют следующие параметры:
- модуль вектора кажущегося ускорения Wi
 ;
;
- модуль вектора абсолютной скорости Vi
 ;
;
- модуль радиус-вектора Ri
 ;
;
- функционал энергии Fi
Fi=Vi 2/2-B0/Ri,
где В0 - гравитационная константа, равная 3.9860044·1014 м3/сек2.
Оставшийся интервал времени Тост от момента Т2 измерения параметров движения  и
и  до отключения МД вычисляют по формуле:
до отключения МД вычисляют по формуле:
 ,
,
где  - производная от функционала энергии F
- производная от функционала энергии F
 .
.
Угловое положение РБ в ОСК в момент Т2 определяется углом аномалии η (фиг.1), причем
Sinη=XE1/R2,
Cosη=-XE/R2,
где XE1, XE - проекции радиус- вектора R2 на направление векторов  и
и 
XE1=R2(1)·E1(1)+R2(2)·E1(2)+R2(3)·E1(3),
XE=R2(1)·E(1)+R2(2)·E(2)+R2(3)·E(3).
По параметрам  и
и  на момент Т2 вычисляют значения скоростных отклонений ΔV, ΔVb:
на момент Т2 вычисляют значения скоростных отклонений ΔV, ΔVb:
ΔV=VR2-Vорб,
ΔVbi=Vi(1)·B(1)+Vi(2)·B(2)+Vi(3)·B(3),
где  - радиальная скорость на формируемой орбите [2];
- радиальная скорость на формируемой орбите [2];
VR2=(R2(1)·V2(1)+R2(2)·V2(2)+R2(3)·V2(3))/R2 - вычисленная радиальная скорость.
Из-за малой продолжительности режима ожидания отсечки (5÷10 секунд) можно считать, что ускорение РБ Wi на этом участке постоянно, то есть W=W2.
Для обеспечения компенсации отклонений ΔV, ΔVb за оставшийся интервал времени Тост до выключения МД их изменение должно выполняться с требуемыми ускорениями (фиг.2):
 ,
,
 .
.
Эти ускорения определяют требуемые значения радиальной и ортогональной составляющих ускорения W, развиваемого маршевым двигателем. Трансверсальная составляющая  определяется как
определяется как
 .
.
Три составляющих ускорения определяют требуемую ориентацию тяги маршевого двигателя относительно формируемой орбиты. Для реализации этой ориентации определяют соответствующие значения углов тангажа и курса в принятой для их отсчета ИСКВ.
Проекции требуемых ускорений на вектора  ,
,  ,
,  определяют как
определяют как
 ,
,

 .
.
Эти проекции определяют вектор  в ОСК, причем
в ОСК, причем
Wтр(1)=WE1, Wтр(2)=WE, Wтр(3)=WB.
Матрица перехода МVG от ГИСК к системе координат, определяемой векторами  ,
,  ,
,  , имеет вид
, имеет вид
Вектор требуемых ускорений в ГИСК определяется как
 ,
,
а в ИСКВ
 .
.
Из элементов матрицы  определяют требуемые значения угла тангажа ϑтр и курса ψтр, реализующих направление вектора тяги, обеспечивающее компенсацию отклонений ΔV, ΔVb:
определяют требуемые значения угла тангажа ϑтр и курса ψтр, реализующих направление вектора тяги, обеспечивающее компенсацию отклонений ΔV, ΔVb:
 ,
,
 .
.
Эффективность коррекции направления вектора тяги в конце маневра проверена путем математического моделирования выведения РБ на геостационарную орбиту в условиях предельных разбросов (МАХ и MIN) по параметрам РБ: тяговооруженности, балансировочных углов положения камеры сгорания МД, эффективности двигателей стабилизации. При этом рассогласование между текущей и требуемой ориентацией отрабатывалось с угловой скоростью ω=1 гр/сек при длительностях режима ожидания отсечки Тож, равном 5 и 10 секунд. Результаты моделирования приведены в таблице. Контролируемыми параметрами для геостационарной орбиты приняты период обращения Т, угол наклонения i и эксцентриситет Ех, требования по которым определены значениями: Т=89276 сек, i=0, Ех=0.
Из полученных данных следует, что коррекция направления вектора тяги МД в конце маневра улучшила показатели по периоду и наклонению при практически неизменном эксцентриситете. При этом погрешность по углу наклонения орбиты при длительности режима ожидания отсечки Тож=5 секунд уменьшилась в 1.1÷1.5 раза. При увеличении длительности режима ожидания отсечки Тож до 10 секунд погрешность по углу наклонения сократилась на порядок.
Источники информации
1. А.С. Сыров, В.Н. Соколов, В.В. Ежов, Л.И. Кислик. Алгоритм наведения разгонного блока с нерегулируемым маршевым двигателем и малой тяговооруженностью. Авиакосмическая техника и технология, 1998, №1.
2. Краффт Эрике. Космический полет. М.: Государственное издательство физико-математической литературы, 1963, т.1, с.398.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ РАЗГОННОГО БЛОКА НА УЧАСТКЕ ДОРАЗГОНА | 2010 |
|
RU2424954C1 |
| СПОСОБ КОРРЕКЦИИ ПАРАМЕТРОВ ПРОГРАММЫ ОРИЕНТАЦИИ РАЗГОННОГО БЛОКА | 2010 |
|
RU2432595C1 |
| СПОСОБ УПРАВЛЕНИЯ ПРОДОЛЬНЫМ ДВИЖЕНИЕМ РАЗГОННОГО БЛОКА НА УЧАСТКЕ ДОРАЗГОНА | 2009 |
|
RU2408851C1 |
| СПОСОБ КОРРЕКЦИИ ПАРАМЕТРОВ ПРОГРАММЫ ИЗМЕНЕНИЯ ПРОДОЛЬНОГО ДВИЖЕНИЯ ПРИ ТЕРМИНАЛЬНОМ УПРАВЛЕНИИ НАВЕДЕНИЕМ РАЗГОННОГО БЛОКА НА ЗАДАННУЮ ОРБИТУ | 2003 |
|
RU2254271C2 |
| СПОСОБ КОРРЕКЦИИ ПАРАМЕТРОВ ПРОГРАММЫ ОРИЕНТАЦИИ ПРИ ТЕРМИНАЛЬНОМ УПРАВЛЕНИИ НАВЕДЕНИЕМ РАЗГОННОГО БЛОКА НА ЗАДАННУЮ ОРБИТУ | 2010 |
|
RU2454357C1 |
| СПОСОБ ФОРМИРОВАНИЯ ПРОГРАММЫ ОРИЕНТАЦИИ РАЗГОННОГО БЛОКА ПРИ ТЕРМИНАЛЬНОМ УПРАВЛЕНИИ ЕГО НАВЕДЕНИЕМ НА ЗАДАННУЮ ОРБИТУ | 2005 |
|
RU2282568C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МОМЕНТА ВРЕМЕНИ ОКОНЧАНИЯ МАНЕВРА И ОТСЕЧКИ МАРШЕВОГО ДВИГАТЕЛЯ РАЗГОННОГО БЛОКА | 2011 |
|
RU2467930C1 |
| СПОСОБ КАЛИБРОВКИ ИМПУЛЬСА ТЯГИ МАРШЕВОГО ДВИГАТЕЛЯ | 2009 |
|
RU2388665C1 |
| СПОСОБ КОРРЕКЦИИ ВРЕМЕНИ ВКЛЮЧЕНИЯ МАРШЕВОГО ДВИГАТЕЛЯ РАЗГОННОГО БЛОКА НА УЧАСТКЕ ДОРАЗГОНА | 2011 |
|
RU2461496C1 |
| СПОСОБ УПРАВЛЕНИЯ ПРОДОЛЬНЫМ ДВИЖЕНИЕМ РАЗГОННОГО БЛОКА НА УЧАСТКЕ ДОРАЗГОНА | 2007 |
|
RU2350521C1 |
Изобретение относится к области, связанной с управлением движением разгонного блока при выведении его на заданную орбиту. Техническим результатом изобретения является повышение методической точности формирования заданной орбиты путем коррекции направления вектора тяги маршевого двигателя в конце маневра после перехода в режим ожидания отсечки маршевого двигателя, выполняемый за установленный интервал времени до прогнозируемого момента его выключения. Решение задачи по корректировке направления вектора тяги реализуется путем определения и отработки значений углов тангажа и курса, требуемых для обеспечения компенсации отклонений радиальной и ортогональной скоростей от их требуемых значений на формируемой орбите в момент отключения маршевого двигателя. 2 ил., 1 табл.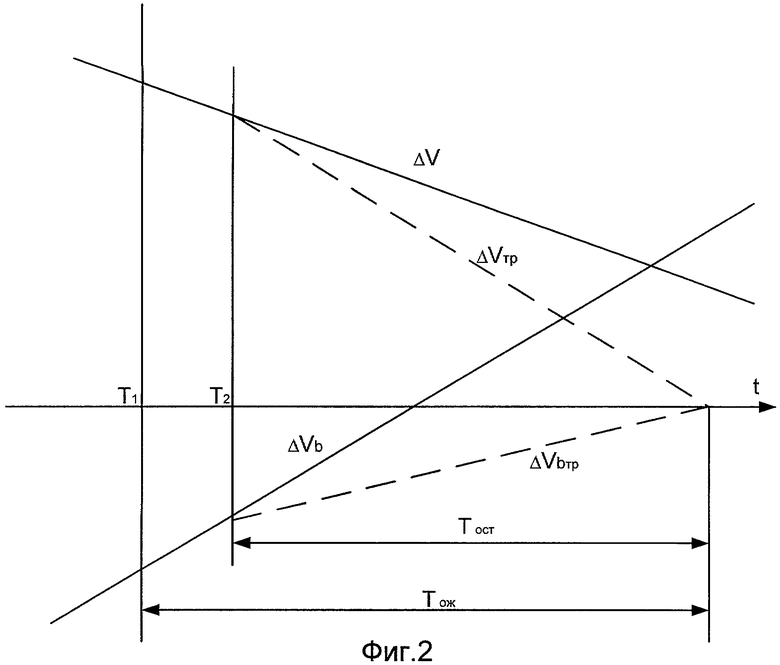
Способ управления движением разгонного блока в конце маневра, заключающийся в том, что перед началом маневра выполняют разворот разгонного блока по тангажу и курсу до достижения ориентации, определяемой в полетном задании начальными значениями углов программы ориентации на маневре, стабилизируют на этом направлении продольную ось разгонного блока до момента начала отработки заданной программы ориентации, включают на оговоренный в полетном задании интервал времени двигатели коррекции импульса для поджатия топлива в баках, запускают маршевый двигатель, спустя фиксированный момент времени после запуска маршевого двигателя начинают отработку программы ориентации разгонного блока, корректируют программу ориентации с помощью терминального управлении, в установленные интервалы времени до отключения маршевого двигателя последовательно фиксируют программу ориентации, переходят в режим ожидания отсечки маршевого двигателя и выключают маршевый двигатель по достижению заданного функционала энергии, отличающийся тем, что после перехода в режим ожидания отсечки маршевого двигателя по двум последовательно измеренным значениям векторов скорости, радиус-вектора и кажущегося ускорения разгонного блока определяют текущие значения отклонений по скорости в радиальном и ортогональном направлении, вычисляют оставшийся интервал времени до достижения заданного функционала энергии и требуемые значения радиального и ортогонального ускорений для отработки этих скоростных отклонений на данном интервале, используя вычисленные значения радиального и ортогонального ускорений и значение модуля измеренного кажущегося ускорения определяют величину третьей трансверсальной составляющей требуемого ускорения, пересчитывают полученные составляющие ускорения в инерциальную систему координат выведения, вычисляют по ним требуемую в этой системе ориентацию тяги маршевого двигателя по углам тангажа и курса, обеспечивающую компенсацию отклонений по радиальной и ортогональной составляющей скорости, и разворачивают продольную ось разгонного блока в направлении вычисленной ориентации.
| СЫРОВ А.С.и др | |||
| Алгоритм наведения разгонного блока с нерегулируемым маршевым двигателем и малой тяговооруженностью | |||
| В: журнал «Авиакосмическая техника и технология», 1998, №1, с.31-33 | |||
| СПОСОБ ФОРМИРОВАНИЯ ПРОГРАММЫ ОРИЕНТАЦИИ РАЗГОННОГО БЛОКА ПРИ ТЕРМИНАЛЬНОМ УПРАВЛЕНИИ ЕГО НАВЕДЕНИЕМ НА ЗАДАННУЮ ОРБИТУ | 2005 |
|
RU2282568C1 |
| СПОСОБ КОРРЕКЦИИ ПАРАМЕТРОВ ПРОГРАММЫ ИЗМЕНЕНИЯ ПРОДОЛЬНОГО ДВИЖЕНИЯ ПРИ ТЕРМИНАЛЬНОМ УПРАВЛЕНИИ НАВЕДЕНИЕМ РАЗГОННОГО БЛОКА НА ЗАДАННУЮ ОРБИТУ | 2002 |
|
RU2211786C1 |
| СПОСОБ КОРРЕКЦИИ ПАРАМЕТРОВ ПРОГРАММЫ ИЗМЕНЕНИЯ ПРОДОЛЬНОГО ДВИЖЕНИЯ ПРИ ТЕРМИНАЛЬНОМ УПРАВЛЕНИИ НАВЕДЕНИЕМ РАЗГОННОГО БЛОКА НА ЗАДАННУЮ ОРБИТУ | 2003 |
|
RU2254271C2 |
| US 5595360 A, 21.01.1997 | |||
| US 6253124 B1, 26.06.2001. | |||

