1
Изобретение относится к транспортному машиностроению.
Известен гидростатический сервомеханизм рулевого управления, преимущественно для строительно-дорожных машин, состояш,ий из исполнительного контура, содержаш,его, по крайней мере, один рабочий насос, один сервомеханизм и один золотниковый распределитель, соединенные магистралями, и управляющего контура с дозировочным насосом, приводимым командным органом и подключенным к торцовым крышкам распределителя магистралями, в которых установлен, по крайней мере, один симулятор обратной связи, соединенный так же с магистралями исполнительного контура.
Однако такие сервомеханизмы сложны конструктивно, недостаточно надежны и склонны к неустойчивости системы при автоколебаниях.
Для упрощения конструкции и повышения устойчивости системы против автоколебаний 3 предлагаемом сервомеханизме симулятор обратной связи состоит из расходомера, установленного в одной из магистралей исполнительного контура, и механически с ним соединенного регулируемого дросселя, установленного между магистралями управляющего контура. При этом расходомер и регулируемый дроссель могут быть размещены в общем корпусе, подключенном своими торцами к магистралям исполнительного контура и разделенном перемычками на три полости, крайние из которых связаны с магистралями исполнительного и управляющего контуров, а средняя - с одной из магистралей управляющего контура, при этом внутри корпуса установлен цилиндрический стержень, выполненный с коническим пояском на одном конце, поджатым пружиной к корпусу и разобщающим в нейтральном положении командного органа магистраль исполнительного контура от крайней полости корпуса, подключенной к этой же магистрали, а на противоположном конце стержня выполнена коническая проточка, дросселирующая в рабочих положениях командного органа поток жидкости, проходящей соответственно через магистрали управляющего контура и среднюю полость корпуса.
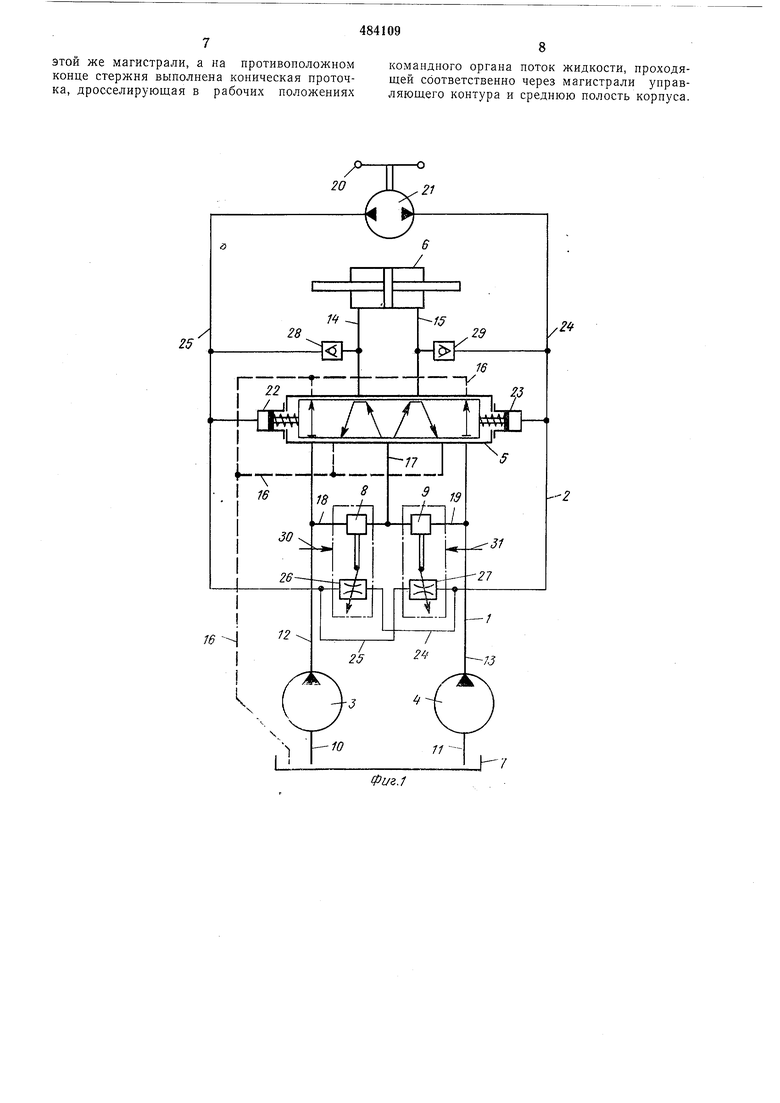
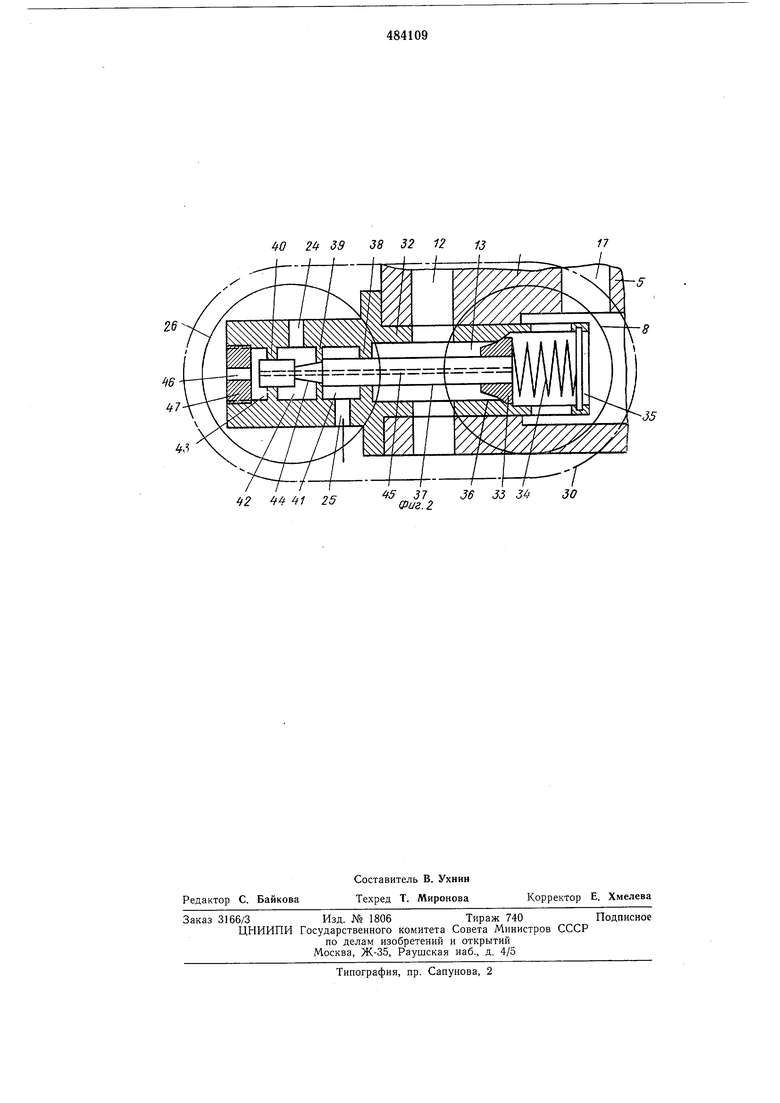
На фиг. 1 изображен вариант блок-схемы описываемого сервомеханизма с двумя питающими насосами и двумя симуляторами обратной связи; на фиг. 2 - пример конструктивного решения симулятора обратной связи.
Сервомеханизм состоит из исполнительного контура 1, изображенного толстыми линиями, и из управляющего контура 2, изображенного тонкими линиями. Исполнительный контур 1 состоит из двух питающих насосов 3 и 4 с приводом от двигателя, распределителя 5, исполиительного элемента 6, бака 7 и двух расходомеров 8 и 9. Питающие насосы 3 и 4 соединены гидромагистралями 10 и 11 с баком 7, магистрали 12 и 13 с распределителем 5, который соединен также магистралями 14 и 15 с исполнительным элементом 6 и сливной магистралью 16 с баком 7. Исполнительный элемент 6 соединен далее с рабочим механизмом или оборудованием, например, с механизмом поворота управляемых колес (на чертеже не изображен). Между магистралями 12 и 13 и общей магистралью 17 с помощью ответвлений 18 и 19 включены расходомеры 8 и 9. В качестве таких расходомеров могут быть использованы обратные клапаны или золотники, которые за счет перепада давления, пропорционального расходу жидкости, деформируют пружину или диафрагму. Управляющий контур 2 состоит из приводимого командным органом 20, например рулевым колесом, дозирующего насоса 21, соединенного с бустерами 22 и 23, распределителя 5 управляющими магистралями 24 и 25, и включенных между ними регулируемых дросселей 26 и 27. Регулируемыми дросселями 26 и 27 могут быть любые дроссели с изменяемым проходным сечением. Магистрали 24 и 25 соединены с магистралями 14 и 15 через обратные клапаны 28 и 29. Расходомеры 8 и 9 механически соединены с регулируемыми дросселями 26 и 27, что в сборе образуют симуляторы обратной связи 30 и 31. Питание управляющего контура 2 жидкостью на чертеже не изображено, так как оно может быть осуществлено любым из известных способов, так, например, из сливной магистрали или из магистралей 12 и 13, или от специального подпиточного насоса, приводимого двигателем и т. д. Симулятор обратной связи 30 (фиг. 2) состоит из расходомера 8 и регулируемого дросселя 26, помещенных в гильзе 32, установленной в корпусе распределителя 5. Расходомер 8 выполнен как обратный клапан 33, прижимаемый к седлу гильзы 32 пружиной 34, которая другой своей стороной упирается в стопорное кольцо 35. Для увеличения рабочего хода обратного клапана 33 он может быть выполнен, например с дополнительным конусом 36, обеспечивающим постепенность открытия проходного сечения. Регулируемый дроссель 26 состоит из стержня 37, соединенного правым концом с обратным клапаном 33, а левым концом, проходящим сквозь пере- 5 мычки 38-40, разделяющие правую полость 41, среднюю полость 42 и левую полость 43.. Стержень 37 в своей части, проходящей через среднюю полость 42, имеет проточку 44, выполненную в виде конуса или плоского 6 скоса, которая вместе с перемычкой 39 создаёт регулируемый дроссель с приблизительно одинаковым гидравлическим сопротивлением проходу жидкости как в одном, так и в протйвоположном направлении. Правая полость 6 41 соединена с управляющей магистралью 25, а средняя полость 42 - с управляющей магистралью 24 (возможно и наоборот). Левая полость 43 по потребности соединяется или отверстием 45 в стержне 37 с общей нагнетательной магистралью 17 или отверстием 46 в левом торце 47 гильзы 32 со сливной магистралью 13, чтобы скомпенсировать изменение объема в полости 43 при движении стержня 37. Толщина перемычки 39 сделана малой (около 1 мм), чтобы гидравлическое сопротивление регулируемого дросселя 26 было независимым от вязкости жидкости и приблизительно одинаковым при течении жидкости как в одном, так и в противоположном направлении. Сервомеханизм работает следующим образом. Если дозировочный насос 21 (фиг. 1), приводимый командным органом 20, например рулевым колесом, находится в покое, распределитель 5 занимает среднее положение, при котором нагнетательные магистрали 12 и 13 питающих насосов 3 и 4 соединены со сливной магистралью 16, а магистрали 14 и 15 исполнительного элемента 6 заперты. В среднем положении распределителя 5 питающие насосы 3 и 4 разгружены, а положение исполнительного элемента 6 и соединенного с ним (не изображенного на чертеже) рабочего механизма - зафиксировано. При повороте направо командного органа 20 и соединенного с ним дозировочного насоса 21 жидкость всасывается из управлляющей магистрали 24, нагнетается в управляющую магистраль 25 и бустер 22 распределителя 5 и пропорционально перемещенному объему жидкости переставляет распределитель 5 вправо. При этом магистраль 14 соединяется с общей магистралью 17, а магистраль 15 соединяется с ответвлением 16 сливной магистрали 13; одновременно дросселируется (в крайнем случае перекрывается) соединение магистралей 12 и 13 со сливной магистралью 16. Вследствие этого часть потока или весь поток жидкости, подаваемый питающими насосами 3 и 4, поступает из магистралей 12 и 13 через ответвления 18 и 19 и через расходомеры 8 и 9 в общую магистраль 17 распределителя 5 и далее из него в магистраль 14 и левую полость исполнительного элемента 6. Расходомеры 8 и 9 управляют через механическую связь регулируемыми дросселями 26 и 27 и устанавливают их в положение соответствующее расходам. Таким образом открывается соединение между магистралями 4 и 25 и жидкость, подаваемая дозировочым насосом, перетекает из нагнетательной агистрали 25 во всасывающую гидромагисталь 24. При остановке командного органа 0 с дозировочным насосом 21 в обеих магитралях 24 и 5 давление уравнивается и расределитель 5 под действием центрирующих ружин бустеров 22 и 23 возвращается обратно в среднее положение, прекращая тем самым движение исполнительного элемента 6.
При повороте командного органа 20 с дозировочным насосом 21 налево распределитель 5 переставляется налево и исполнительный элемент 6 движется тоже налево. При этом работа всего сервомеханизма происходит аналогично тому, как это было описано для поворота направо.
Пропорциональность между движением командного органа 20, например рулевого колеса, и движением исполнительного элемента 6 достигается за счет того, что объем жидкости, перекачиваемый при работе дозировочного насоса 21 из одной в другую магистраль 24 и 25, управляется симуляторами обратной связи 30 и 31, пропорционально потоку жидкости, поступающему в исполнительный элемент 6. Если питающие насосы 3 и 4 не работают, оба регулируемых дросселя 26 и 27 будут закрыты и жидкость из дозировочного насоса 21, приводимого в действие водителем через командный орган 20, например рулевое колесо, будет поступать в зависимости от направления поворота через обратный клапан 28 из магистрали 25 в магистраль 14 или через обратный клапан 29 из магистрали 24 в магистраль 15. При этом обратный поток жидкости из исполнительного элемента 6 через распределитель 5 и расходомеры 8 и 9 невозможен. Таким образом обеспечивается аварийная работоспособность сервомеханизма за счет мускульной энергии водителя.
Симулятор обратной связи работает еледующим образом (фиг. 2).
При перемещении распределителя 5 из среднего в одно из крайних положений весь поток жидкости или часть его протекает из магистрали 12 через ее ответвление 18 в общую магистраль 17 и далее через распределитель 5 в исполнительный элемент 6. При этом обратный клапан 33, пропорционально протекающему количеству жидкости, смещается от седла в гильзе 32 и стержнем 37 посредством проточки 44 открывает соединение правой полости 41 со средней полостью 42 и тем самым сообщает магистраль 25 с магистралью 24. Жидкость, вытесняемая дозировочным насосом 21, проходит около проточки 44 стерл пя 37 из одной в другую магистраль 24 и 25.
Соответствующим подбором обратного клапана 33 с конусом 36, характеристики пружины 34 и профиля проточки 44 стержня 37 достигается пропорциональность в широком диапазоне расхода жидкости между магистралями 24 и 25 управляющего контура 2 и расходом жидкости, поступающей или отводящейся от силового элемента 6. Измененинием конуса 36 обратного клапана 33, характеристики пружины 34 и профиля проточки 44 стержня 37 можно выбрать желаемое отношение расходов дозировочного насоса 21 и исполнительного элемента 6, а затем передаточное число сервомеханизма.
На обратный клапан 33 при работе воздействуют достаточно большие усилия, которые при малом диаметре стержня 37 и малой толщине перемычек 40, 39, 38 исключают возможность заедания. При открытом обратном клапане 33 на него воздействует не только усилие пружины 34, но и усилие, вызванное потоком жидкости, которые стремятся прижать клапан 33 к седлу гильзы 32. Малая толщина средней перемычки 39 обеспечивает независимость гидравлического сопротивления регулируемого дросселя 26 от изменения направления потока жидкости и от изменения ее вязкости.
Симулятор обратной связи 30 в связи со своей простотой и, главным образом, за счет прямого механического соединения расходомера 8 с регулируемым дросселем 26 обеспечивает высокую надежность в эксплуатации. Это его свойство и позволяет использовать изобретение также для сервомеханизмов управления траекторией движения автомобилей и других снециальных самоходных колесных машин - так называемых гидрорулей.
Предмет изобретения
1.Гидростатический сервомеханизм рулевого управления, преимущественно для строительно-дорожных машин, состоящий из исполнительного контура, содержащего, по крайней мере, один рабочий насос, один сервомеханизм и один золотниковый распределитель, соединенные магистралями, и управляющего контура с дозировочным насосом, приводимым командным органом и подключенным к торцовым крышкам распределителя магистралями, в которых установлен, по крайней мере, один симулятор обратной связи, соединенный так же с магистралями исполнительного контура, отличающийся тем, что, с целью упрощения конструкции и повыщения устойчивости системы против автоколебаний, симулятор обратной связи состоит из расходомера, установленного в одной из магистралей исполнительного контура, и механически с ним соединенного регулируемого дросселя, установленного между магистралями управляющего контура.
2.Сервомеханизм по п. 1, отличающийся тем, что расходомер и регулируемый дроссель размещены в общем корпусе, подключенном своими торцами к магистралям исполнительного контура и разделенном перемычками на три полости, крайние из которых связаны с магистралями исполнительного и управляющего контуров, а средняя - с одной из магистралей управляющего контура, при этом внутри корпуса установлен цилиндрический стержень, выполненный с коническим нояском на одном конце, поджатым пружиной к корпусу и разобщающим в нейтральном положении командного органа магистраль исполнительного контура от крайней полости корпуса, подключенной к
этой же магистрали, а на противоположном конце стержня выполнена коническая проточка, дросселирующая в рабочих положениях
командного органа поток жидкости, проходящей соответственно через магистрали управляющего контура и среднюю полость корпуса.
| название | год | авторы | номер документа |
|---|---|---|---|
| Двухконтурный рулевой привод транспортного средства | 1983 |
|
SU1155489A1 |
| Гидравлическая судовая рулевая машина | 1981 |
|
SU958227A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 2002 |
|
RU2218486C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 2006 |
|
RU2311567C1 |
| ГИДРОСИСТЕМА ЗЕРНОУБОРОЧНОГО КОМБАЙНА | 2004 |
|
RU2274996C2 |
| Гидропривод транспортного средства | 1983 |
|
SU1171374A1 |
| Гидравлический распределитель | 1982 |
|
SU1125422A1 |
| Электрогидравлический распределитель | 1976 |
|
SU603781A1 |
| ГИДРОСИСТЕМА ЗЕРНОУБОРОЧНОГО КОМБАЙНА | 2001 |
|
RU2209540C2 |
| Двухступенчатое управляющее устройство транспортного средства с компенсацией давления по крайней мере для двух потребителей | 1984 |
|
SU1357295A1 |
14
28
/
25
22L
: А А 1
-15
2
/
.29
16
-2 if2 1 25 5 37 36 33 J« Фиг. 2 до
