Можно написать соотношение
или Сд Ср -
с„
Резонансные частоты контура выразятся aк (L и С в см).
Высшая частота
10
3 10
Л
УГс
(ротор выведен)
Низшая частота
3
/«
21.УцСо+Cj,)
(ротор введен полностью) Частота при повороте ротора на угол а
до
10
л
(CH-Ca)
Для отношения частот получится ражение:
/« lAEl±S г
fn
i/ izLS
г/
С„+С„А
1+г
л
подставляя сюда значение Q, имеем
lAl+s.
г П г
/1 +
Tt
Для отношения высшей частоты к низшей вводится обозначение „коэфициент перекрытия:
-Ч-/
1 + 5очевидно, что
И - Ш- -Для отношения частоты /, к низшей
вводится обозначение „коэфициент настройки :К
J. /«
. . (I)
Да у- -
/1+()Таков окончательный вид электрической формулы (абсолютное значение частоты при любом угле поворота ротора я можно найти, перенеся в правую часть / и подставляя его найденное выше
значение).
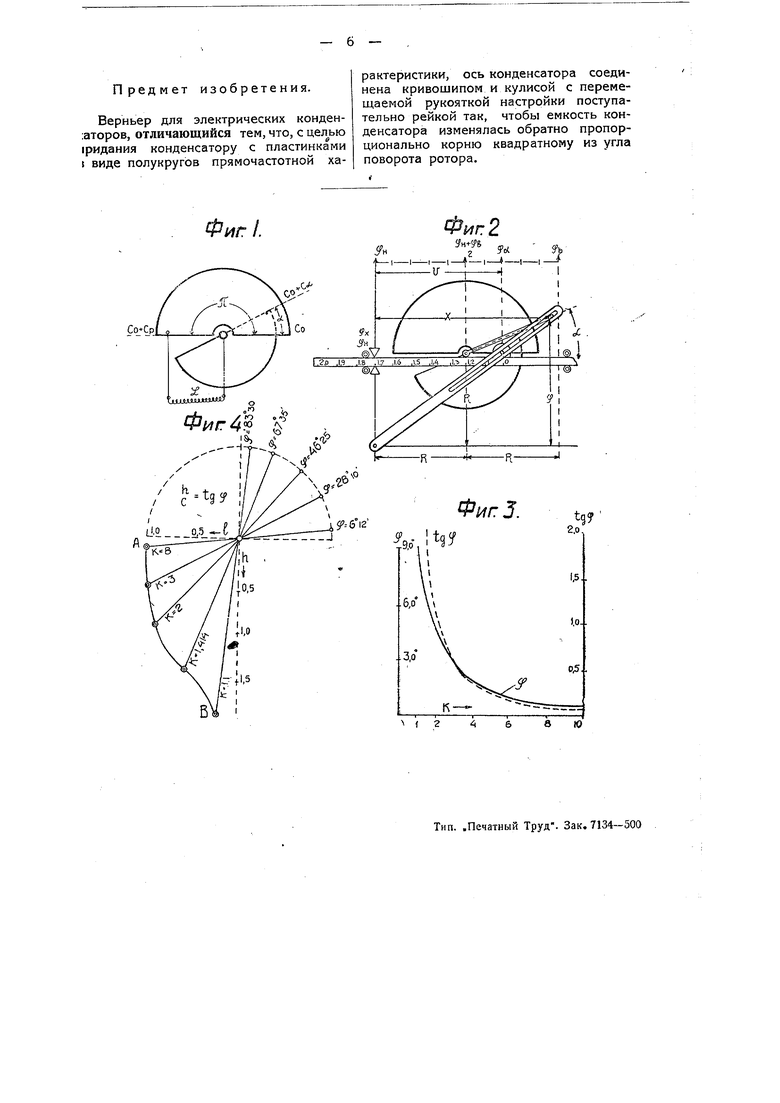
Для осуществления условия, что линейное изменение угла поворота рукоятки настройки (частоты контура) меняет емкость конденсатора обратно пропорционально корню из угла поворота ротора, применяется система: рейка- кулиса-кривошип (фиг. 2).
При этом рейка перемешается линейуо (при вращении рукоятки настройки), кривошип укреплен на оси ротора, кулиса служит кинематической связью между ними. Центр качания кулисы- В начале координат. Координаты центра вращен(1я кривошипа (и ротора конденсатора) равны длине кривошипа:
RРейка движется параллельно оси абсцисс на высоте центра вращения кривошипа: YQ R.
Частота контура отсчитывается вдоль рейки на прямой, проходящей через центр вращения кривошипа.
Частота контура определяется относительным положением кривошипа, кулисы и рейки, а Именно:
Рейка в крайнем левом положении
Кулиса легла на ось ординат
Кривошип повернут на 180°
Ротор полностью введен
Рейка отвела кулису в крайнее правое положение
Кривошип в начале окружности
Ротор весь выведен
Отсюда:
/.-/«
R Частота Д при любом другом угле поворота кривошипа и ротора должна (по условию) быть пропорциональна линейному перемещен 1Ю рейки из крайнего левого положения (fi80 /J вправо на отрезок
V:f,f.+ V.
Для координат пальца кривошипа в любом его положении
л: /(+cos а); j/ / a4sina) Из подобия треугольников следует: V R 1 + COS а V jR-y R 1 sin 3 Следовательно Л /я+ / Г 1 1 1 + COS Д I 1+sin.jКроме того из предыдущего вытекает: J К Л-Л 1 ГЛ Л -1 - -J/„2 Л Окончательно формула для кинематического выражения коэфициента настройки будет иметь вид: и - - 1 К-1 1 а - Т - 1 -|-sin а Выбранная кинематическая система удовлетворит поставленным условиям в том случае, если для любых значений а от 0° до 180° формула (I) и формула (II) дадут тождественный результат (табл. I). Для предельных значений угла а обе формулы дают тождественную величину коэфициента настройки-Ку при любых значениях перекрытия /С
Таблица I Для промежуточных значений а электрическая и кинематическая формула могут дать тождественный результат только при некотором критическом значении перекрытия, которое найдется сопоставлением обеих формул: для а -4(Л:+1)2 к 2,066 16 3 + для а: (К+ЗГ- К . ,nm 32 «. 2,060 для а - г (.62)2 ; /С 2,063. l+3/C2 540 Решая графически (с точностью доР/о) каждое из этих уравнений, можно найти для всех трех случаев очень близкий результат, который практически может быть округлен или 1+ 4или 3. -о-о Такое соотношение емкостей довольно часто встречается на практике у аппаратов для коротких и ультракоротких волн
Электрическая ф-ла
Значение угла а
Направление кулисы и направление кривошипа совпадают
- lAJAi.
ч - Ротор введен - v i+K на V2 1 - У 1+3 я -- Ротор введен на V4 К т: Ротор введен полностью
Кинематическая ф-ла
К . 2
./с+з
К /с+10,62 К. - 11,62 / 1+ -4-1+0
| название | год | авторы | номер документа |
|---|---|---|---|
| Интегратор | 1938 |
|
SU56663A2 |
| Устройство для гармонического анализа и синтеза периодических функций | 1944 |
|
SU68356A1 |
| Счетный полукруг для расчета радиосетей | 1921 |
|
SU993A1 |
| СПОСОБ ПОЛУЧЕНИЯ ОТРАЖАЮЩЕЙ ПОВЕРХНОСТИ РЕФЛЕКТОРА ЗЕРКАЛЬНОЙ АНТЕННЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2067340C1 |
| Универсальный поворотный стол | 1986 |
|
SU1395460A1 |
| Привод прерывистого движения роторов и конвейеров упаковочных машин | 1985 |
|
SU1274970A1 |
| Шаговый электродвигатель с колеблющимся ротором | 1989 |
|
SU1628159A1 |
| Рулевое устройство для транспортного средства со всеми управляемыми колесами | 1974 |
|
SU561687A1 |
| Устройство для обработки оптических деталей | 1990 |
|
SU1816659A1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 1999 |
|
RU2164860C1 |
.
Кулиса легла на ось ординат
.Однако можно добиться совпадения обеих формул со значительно большей точностью и для любых значений перекрытия, если отказаться от выбранных постоянных координат центра вращения кривошипа (XQ YQ R) и подбирать взаимное расположение центра вращеВ этом случае кинематическая формула приобретает вид:
I К- г /г (1 + cos а) + sin а (1-/)
fГ 12 I/z+sina
J V,
Очевидно в частном случае: Л 1 1 она переходит в формулу (II).
Для определения пирометров h и 1 следует произвести опять сравнение электрической и кинематической формулы для некоторых особых значений угла а (табл. II).
Для предельных значений « обе формулы также совпадают. Любые два из трех промежуточных значений могут быть использованы для нахождения
к. -1.
ния кривошипа и центра качания кулисы в зависимости от заданного перекрытия к. Оставляя центр качания кулисы в начале координат, вводим обозначение искомых новых координат центра вращения кривошипа:
YO hR
.... (Ill)
двух неизвестных пирометров А и 1, зависящих от /С- Третье значение может служить для проверки результата.
Проделав эти вычисления, возможно изобразить искомую зависимость в виде кривой А-В (фиг. 4). Здесь центр вращения кривошипа закреплен в начале координат, а по кривой Л-В перемещается ось качания кулисы в зависимости от величины перекрытия К.
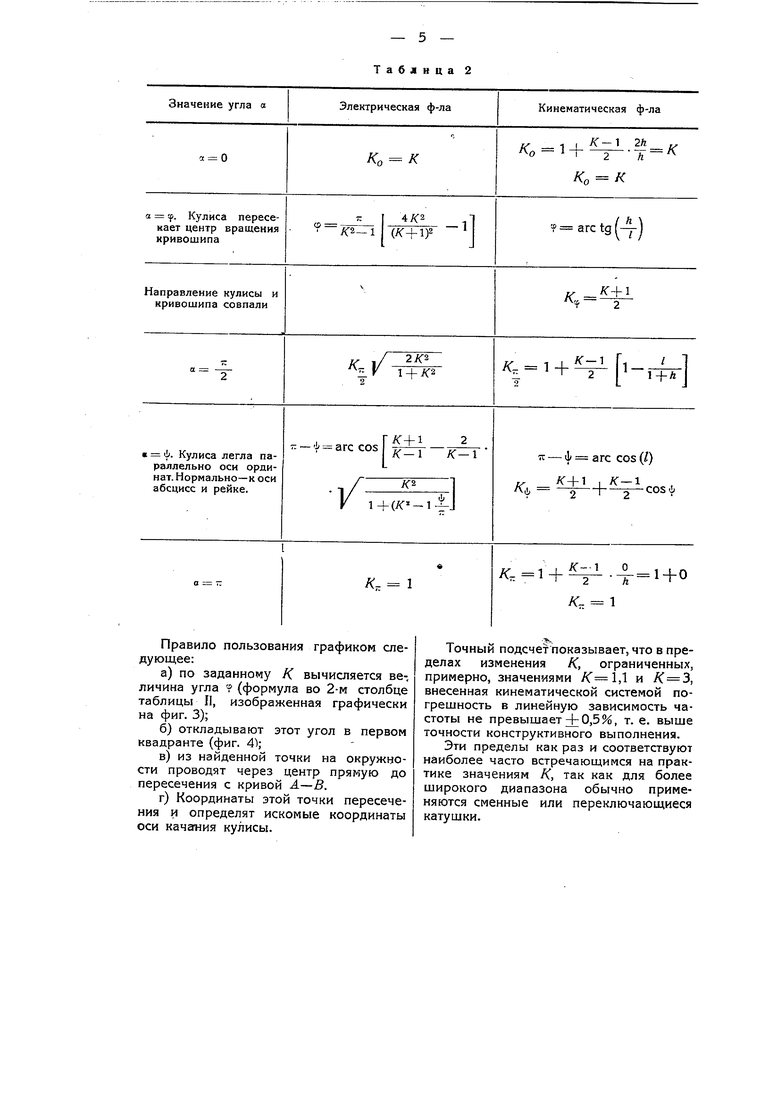
Правило пользования графиком следующее:
а)по заданному К вычисляется величина угла (формула во 2-м столбце таблицы II, изображенная графически на фиг. 3);
б)откладывают этот угол в первом квадранте (фиг. А
в)из найденной точки на окружности проводят через центр прямую до пересечения с кривой А-В.
г)Координаты этой точки пересечения и определят искомые координаты оси качания кулисы.
5
Таблица 2
Точный подсчетЪоказывает, что в пределах изменения К, ограниченных, примерно, значениями ,1 и , внесенная кинематической системой погрешность в линейную зависимость частоты не превышает+0,5%, т. е. выше точности конструктивного выполнения.
Эти пределы как раз и соответствуют наиболее часто встречающимся на практике значениям К, так как для более широкого диапазона обычно применяются сменные или переключающиеся катушки.
Предмет изобретения.
Верньер для электрических конден:аторов, отличающийся тем, что, с фидания конденсатору с пластинками t виде полукругов прямочастотной хаФиг. , l-f-lу fO о А иг4 § оЪ а рактеристики, ось конденсатора соединена кривошипом и кулисой с перемещаемой рукояткой настройки поступательно рейкой так, чтобы емкость конденсатора изменялась обратно пропорционально корню квадратному из угла поворота ротора. /I-I-1 90
в Ю
( 2 Фиг 2 f Уб |-I- -М4 ФигЗ. 1

