Прибор работает следующим образом.
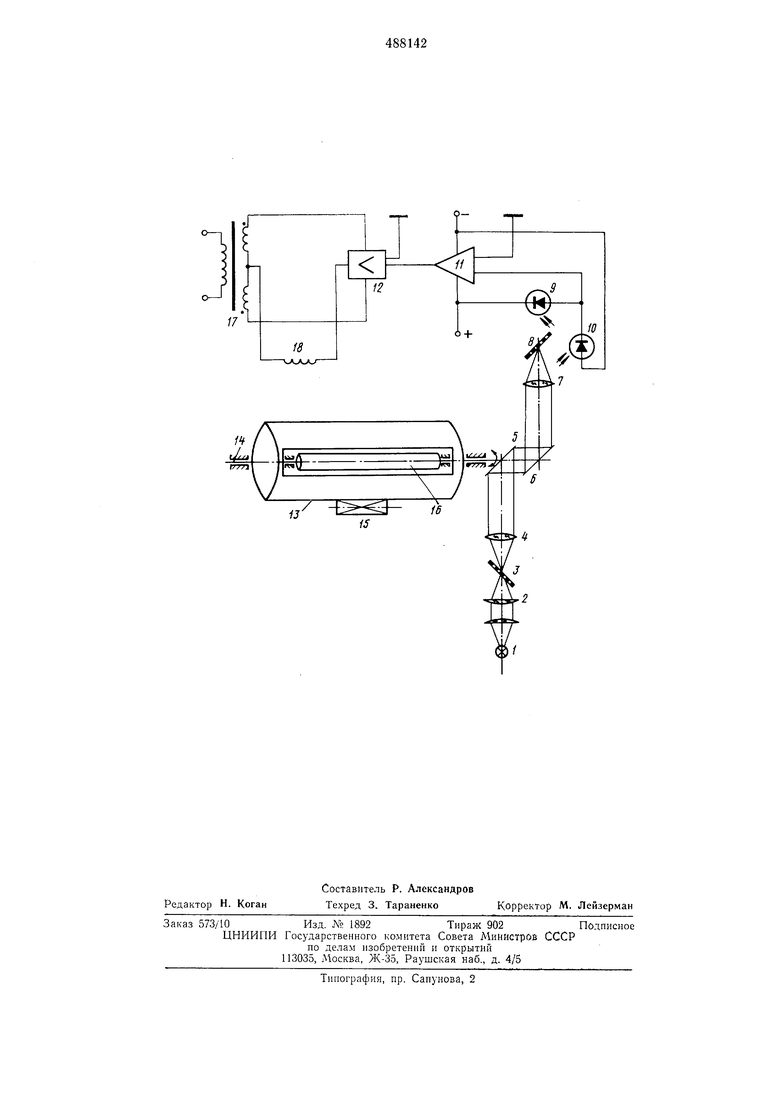
При установке дважды интегрирующего акселерометра на стабилизированное горизонтальное основание и при отсутствии ускорения подвижное зеркало 5 установлено таким образом, что изображение первого растра 3 смещено относительно второго растра 8 на половину полосы растра. В силу свойства автоколебательных систем статор и ротор соверщают колебания относительно положения равновесия, соответствующего отвесному положению маятника. При смещении изобрал ения первого растра 3 относительно второго растра 8 на величину, больше половины полосы растра с фотодиодом, снимается сигнал определенной полярности и поступает на вход интегрального усилителя 11, выходной сигнал коTOjporo можно рассматривать как коммутирующее напряжение для выходного усилителя 12, использующегося как прерыватель тока в цепи управляющей обмотки 18 микродвигателя. При наличии напряжений на обмотке возбуждения 18 к ротору 16 прикладывается момент, под воздействием которого он начинает вращаться. Статор двигателя 13 за счет реакции на разгон ротора вращается в противоположную сторону до тех пор, пока изображение первого растра 3 не сместится относительно второго 8 на ту же величину, но в противоположную сторону. С фотодиодов 9, 10 снимается сигнал противоположной полярности, что приводит к изменению фазы на 180° управляющего напряжения. Изменяется сторона вращения ротора и статора, они будут соверщать симметричные колебания с большой частотой и малой амплитудой.
Таким образом, оптический изме(ритель, наряду с задачей определения угла отклонения маятника, совместно с усилительным устройством обеспечивают бесконтактную коммутацию управляющего напряжения по релейной характеристике и этим самым автоколебательный режим работы м.икродвигателя. Средняя составляющая от моментов ротора и статора равна нулю.
При ускорении движущегося объекта, на котором установлен акселерометр, происходит нарущение симметрии колебаний ротора и соответственно статора с эксцентричным грузом. Появляется постоянная составляющая момента реакции ротора на статор и уравновещивается момент от сил инерции. Для постоянных
составляющих имеется .следующее равенство
моментов , где М° - моо
мент реакции ротора на статор, MK - момент,
нриложенный к ротору, Ми - момент сил инерции, т - масса маятника, а - ускорение движущегося объекта, / - плечо маятника. За счет момента УИд ротор вращается с ускоdu
рением
на основании равенства моменdt
тов можно записать , где /д - моdt
мент инерции ротора, 0 - средняя угловая скорость вращения ротора. Интегрируя последнее вращение дважды по
ml ,, ,. и/ о времени, получим: со и р - 5, где
fo
RR
и - скорость движения объекта, 5 - координата или путь, пройденный объектом, Р - угол поворота ротора относительно статора. Угол поворота вала двигателя пропорционален пройденному расстоянию.
Формула изобретения
Дважды интегрирующий акселерометр, содержащий двигатель, статор которого нодвещен с маятником на оси в onoipax корпуса, датчик угла поворота статора относительно корпуса, связанный через усилитель с обмоткой управления двигателя, отличающийся
тем, что, с целью увеличения точности, датчик угла выполнен в виде оптической системы, содержащей последовательно установленные источник света, конденсор, первый растр с объективом, подвижное и неподвижное зеркала,
укренленные под углом 45° к оси статора, объектив со вторым растром, два фотодиода, подключенных по дифференциальной схеме на вход интегрального усилителя, и модулятор, причем плоскости растров расположены между собой под углом 90° и под углом 45° к оси статора, оптические оси объективов параллельны п расположены под углом 90° к оси статора, а фотодиоды равноудалены от второго растра и их чувствительные плоскости расположены под углом 90° один к другому.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНЕРЦИАЛЬНЫЙ ИЗМЕРИТЕЛЬНЫЙ ПРИБОР | 2006 |
|
RU2310166C1 |
| СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЯ УГЛОВЫХ СКОРОСТЕЙ | 1995 |
|
RU2115129C1 |
| ИНЕРЦИАЛЬНЫЙ ИЗМЕРИТЕЛЬНЫЙ ПРИБОР | 2005 |
|
RU2300079C1 |
| Гироскопический маятник | 2019 |
|
RU2719241C1 |
| Акселерометр | 1977 |
|
SU699436A2 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ЖЕЛЕЗНОДОРОЖНОГО ПОДВИЖНОГО СОСТАВА, ПОДВЕСА ЧУВСТВИТЕЛЬНОГО ЭЛЕМЕНТА ПОПЛАВКОВОГО МАЯТНИКОВОГО АКСЕЛЕРОМЕТРА И УСТРОЙСТВА ЕГО РЕАЛИЗУЮЩИЕ | 2005 |
|
RU2281874C1 |
| СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВЫХ СКОРОСТЕЙ | 1995 |
|
RU2115128C1 |
| ВЙВЛЙОТЕГСА | 1966 |
|
SU184465A1 |
| Интегрирующий акселерометр | 1980 |
|
SU883744A1 |
| СПОСОБ ИЗМЕРЕНИЯ МОМЕНТА ИНЕРЦИИ ТЕЛА | 2000 |
|
RU2172936C1 |