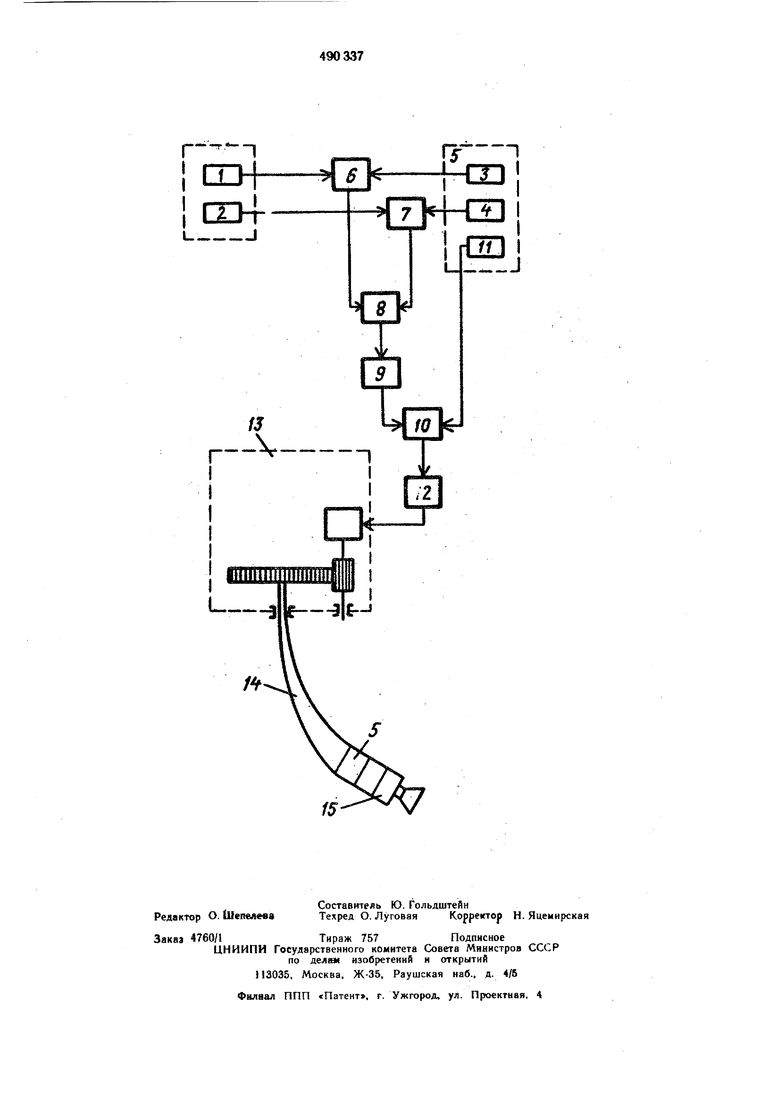
Изобретение относится к провОЛки наклонно направленных скважви забойными двигателями.; V . ; Известно устройство для ориентирования, основанное на использовании результатов измерения параметров траектории различными инклинометрами, в том числе содержащими забойные датчики и наземные регистраторы углов азимута, наклона и ноложения отклонителя. К общим недостаткам таких устройств следует отнести низкую точность ориентирования при значительной трудоемкости и сложности его осуществления силами специально подготовленного персонала. Целью изобретения является устранение этих недостатков путем автоматизации процесса ориентирования. Предлагаемое устройство выполнено на основе телеметрической системы с забойными датчиками и наземными регистраторами углов положения отклонителя, азимута и наклона скважины, а также узлов задания необходимых значений азимута и угла наклона, результат сравнения которых с регистрируемыми значениями этих углов для каждой точки траектории ствола преобразуется в необходимый угол положения отклочит ля и после сравнения с углом i:jralffW4ecKoro положения отклонителя в виде электрического сигнала передается исполнительному механизму поворота бурильной колонны и, следовательно, отклонителя. Предлагаемое устройство отличается тем, что выходы узлов сравнения, подключенных к узлам задания азимута и угла наклона, подключены к входам преобразователя системы координат, выход которого соединен с входом преобразователя угла в напряжение. На чертеже изображена блок-схема предлагаемого устройства. Узлы задания 1 и 2 соответственно углов азимута и наклона, выполненные, например, в виде потенциометров, снабженных щкалами в угловых градусах, и наземные регистраторы 3 и 4 фактических значений указанных углов телеметрической системы 5 соответственно подключены к узлам 6 и 7 сравнения фактических и заданных значений тех же углов, выполненных, например, в виде магнитных усилителей. Выходы узлов 6 и 7 сравнения подключены к входам преобразователя 8 прямоугольной системы координат в полярную, выполненную, например, на основе поворотного трансформатора. Выход преобразователя 8 через преобразователь 9 угла в напряжение подсоединен к одному из входов узла 10 сравнения, выполненного, например, в виде магнитного усилителя, а второй
вход этого узла соединен с наземным регистратором 11 фактического угла положения отклонителя. Выход уЭла Ш через усилитель 12 мощности соединен с исполнительным механизмом 13 поворота бурильной колонны 14 и, следовательно, отклонителя 15.
Принцип действия предлагаемого устройства заключается в автоматической ycтaнc кe отклонителя в необходимое положение, соответствующее направлению , величина н знак которого определяются разностью фактических заданных значений-углов азимута и наклона скважины в каждой точке ее траектсфин.
Фактические значения углов азимута н наклона скважины в каждой точке ее траектории, а также угол фз1ртического положения отклоиителя 5 измеряются забойшпи датчиками телеметрической систевы 5.
Результаты этих измерений фиксируются наземнымгг регистраторами 3, 4 и 11, выходное напряжение которых про порциональио измеряемым углам.
Необходимая проектная траектория скважины задается углами ее азимута и наклона с помощью узлов задания 1 и 2 соответственно, выходное напряжение которых пропорциоиаль. во заданным углам.
Сравнение напряжений, нропорциональных заданному и фактическому углам азимута, производит узел б, а заданному в фактическому углам наклона - узел 7,,
Величина и фаза синусоидального напряжения, получаемого от узле 6, выполненного, например, в виде магнитного } силителя с выходом на четной гармонике, характеризует результат сравнения вводимых величин. Узел 7 выполнен аналогично узлу б и работает в том же режиме.
Выходные напряжения узлов 6 и 7 используются как для проекции построения в прямоугольной системе координат некоего BeKfopa, характеризующего собой направление отклонителя, необходимое для проводки скважииы по заданной траектории, причем в этой системе координат но оси aCkruHcc откладывается результат сравнения напряжений, соответствующих заданному и фактическому углам азимута, а ло оси ординат - углам наклона. Для сравнения фактического угла положения отклонетеля, характеризуемого выходным напряжением регистратора 1,с положением полученного вектора, необходи йо характеризовать последний не проекциями, а Длиной и углом, т.е. перенести этот вектор из прямоугольной в полярную систему координат. Этой цели служит преобразователь 8, выполненный, например, на базе поворотного трансформатора. Полярный угол, полученный на выходе преобразователя 8, преобразуется в напряжение преобразователем 9, выполненным, например, в виде поворотного потенциометра с приводом движка, управляемым от выхода преобразователя 8.
Таким образом, выходное напряжение пре-, 10 образователя 9, характеризующее необходимое положение отклонителя, и напряжение выхода регистратора 11, характеризующее фактическое положение итклоннтеля в скважине, сравниваются узлом 10, выполненным, например, в виде магнитного усилителя с двумя обмотками 15 управления.
Выходное напряжение узла 10 с помощью усилителя 12 мощности , воздействует на привод исполиительного механизма 13, поворачивающего колонну 14 бурильиь1х труб до тех пор; .пока отклоннтёль 15 не будет установлен в положении, при котором на входе узла 10 исчезнет рассогласование между иапряжениями, характеризующими заданное и фактическое положения отклонителя.
Формула изобретения
Устройство для ориентирования отклонителя при проводке скважин по заданной траектории, содержащее телеметрическую систему с забойными датчиками и наземными регистраторами углов положения отклонителя, азимута и наклона скважины, узел сравнения, подключенный своим выходом к исполнительному механизму, а одним из входов - к наземному регистратору угла положения отклонителя, преобразовате ть угла в напряжение, соединенный свсшм выходом с,вторым входом упомянутого узла сравнения, преобразователь прямоугольной системы координат в полярную и узлы сравнения, подключенные к узлам задания азимута и угла наклона, отличающееся тем, что, с целью повышения точности ориентирования, выходы узлов сравнения,- подключенных к узлам задания азимута и угла наклона, подключены к входам преобразователя системы
координат, выход которого соединен с входом преобразователя угла в напряжение.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для ориентирования отклонителя | 1986 |
|
SU1368431A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПОЛОЖЕНИЯ ЗАБОЯ | 1994 |
|
RU2089854C1 |
| ТЕЛЕМЕТРИЧЕСКАЯ СИСТЕМА КОНТРОЛЯ НАВИГАЦИОННЫХ ПАРАМЕТРОВ ТРАЕКТОРИИ СТВОЛА СКВАЖИНЫ | 1997 |
|
RU2110684C1 |
| СИСТЕМА ДЛЯ ОРИЕНТАЦИИ УСТРОЙСТВ НАПРАВЛЕННОГО БУРЕНИЯ ГОРИЗОНТАЛЬНЫХ И СИЛЬНОНАКЛОНЕННЫХ СКВАЖИН | 1991 |
|
RU2015316C1 |
| СИСТЕМА УПРАВЛЕНИЯ ТРАЕКТОРИЕЙ СКВАЖИНЫ В ПРОЦЕССЕ БУРЕНИЯ | 1999 |
|
RU2161701C2 |
| БЕСКАРДАННЫЙ ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР И СПОСОБ ВЫРАБОТКИ ИНКЛИНОМЕТРИЧЕСКИХ УГЛОВ | 1994 |
|
RU2101487C1 |
| Способ определения местоположения бурового инструмента и его ориентирование в обсадной колонне | 1983 |
|
SU1129333A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПОЛОЖЕНИЯ ЗАБОЯ | 1994 |
|
RU2092791C1 |
| СПОСОБ ОРИЕНТИРОВАНИЯ ОТКЛОНИТЕЛЯ ГИДРАВЛИЧЕСКОГО ЗАБОЙНОГО ДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2027850C1 |
| Система автоматизированного управления процессом бурения скважин | 2022 |
|
RU2790633C1 |