Изобретение относится к буровой технике, в частности к средствам контроля забойных параметров при бурении и геофизических исследованиях скважин.
Известен гироскопический инклинометр [1], содержащий измеритель ускорения по трем взаимно перпендикулярным осям и измеритель угловой скорости по тем же осям, состоящим из двух трехстепенных гироскопов, каждый из которых охвачен двумя внутренними отрицательными обратными связями, датчик угла установлен на оси гироскопа, датчик момента - на перпендикулярной к нему оси, корпус каждого гироскопа устанавливают последовательно в положения 0o и 180o и угловую скорость измеряют в каждом из этих положениях гироскопов, угловую скорость Земли по трем взаимно перпендикулярным осям Wx, Wy и Wz определяют как полуразность измеренных угловых скоростей при положениях корпусов гироскопов 0o и 180o, а азимут Ψ вычисляют по формуле  , где gxgygz - значения ускорения по трем взаимно перпендикулярным осям XYZ.
, где gxgygz - значения ускорения по трем взаимно перпендикулярным осям XYZ.
g2= g
ωxωyωz - угловая скорость Земли по трем взаимно перпендикулярным осям
ω
P = gxωx+gyωy+gzωz
Недостатком этого инклинометра является сложность конструкции для устранения погрешности от дрейфов гироскопов.
Известна телеметрическая система контроля параметров скважины [2], содержащая наземный вычислитель и связанный с ним каротажным кабелем скважинный прибор, содержащий шесть измерительных датчиков: три акселерометра и три феррозонда. При этом наземный вычислитель реализует следующий алгоритм: .
.
Недостатком данной системы является наличие сложного и дорогого вычислительного блока.
Целью заявленного предложения является повышение точности измерений скважинных параметров простыми аппаратными средствами.
Поставленная цель достигается тем, что в телеметрической системе контроля параметров нефтяных и газовых скважин, содержащей наземный вычислитель и связанный с ним каротажным кабелем скважинный прибор, содержащий шесть измерительных датчиков в виде акселерометров и феррозондов, наземный вычислитель выполнен на семи преобразователях прямоугольных координат в полярные, двух преобразователях полярных координат в прямоугольные, трех инверторах, трех сумматоров и индикаторе, при этом выходы первых двух акселерометров подключены к первому преобразователю прямоугольных координат в полярные, первый выход которого подключен к первому входу второго преобразователя прямоугольных координат в полярные, на второй вход которого подключен выход третьего акселерометра, второй выход первого преобразователя прямоугольных координат в полярные через первый инвертор подключен к первому входу первого сумматора, второй вход которого соединен с выходом задатчика "Δ" , выходы первых двух феррозондов подключены к входам третьего преобразователя прямоугольных координат в полярные, первый выход которого подключен к первому входу первого преобразователя полярных координат в прямолинейные, а второй выход - к третьему входу первого сумматора, выход последнего соединен с вторым входом первого преобразователя полярных координат в прямоугольные, один из выходов которого соединен с первым входом четвертого преобразователя прямоугольных координат в полярные, а другой подключен к первому входу пятого преобразователя прямоугольных координат в полярные, второй вход которого соединен с выходом третьего феррозонда, а первый выход соединен с первым входом второго преобразователя полярных координат в прямоугольные, один из выходов второго преобразователя прямоугольных координат в полярные подключен к входу индикатора "Тест число акселерометров", а другой - к входу индикатора "Зенитный угол" непосредственно и через второй инвертор к первому входу второго сумматора, второй вход которого соединен с вторым выходом пятого преобразователя прямоугольных координат в полярные, а выход - с вторым входом второго преобразователя полярных координат в прямоугольные, первый выход которого соединен с первым входом шестого преобразователя прямоугольных координат в полярные, а второй подключен к второму входу четвертого преобразователя прямоугольных координат в полярные, один из выходов которого подключен ко входу индикатора "Азимут", а другой - на второй вход шестого преобразователя прямоугольных координат в полярные, выход которого через третий инвертор подключен к входу индикатора "Тест число феррозондов", выходы двух феррозондов через седьмой преобразователь прямоугольных координат в полярные к первому входу третьего сумматора, второй вход которого соединен с выходом задатчика "Δ" , а выход третьего сумматора подключен к входу индикатора "азимут отклонителя", при этом второй выход первого преобразователя подключен к входу индикатора "угол установки отклонителя".
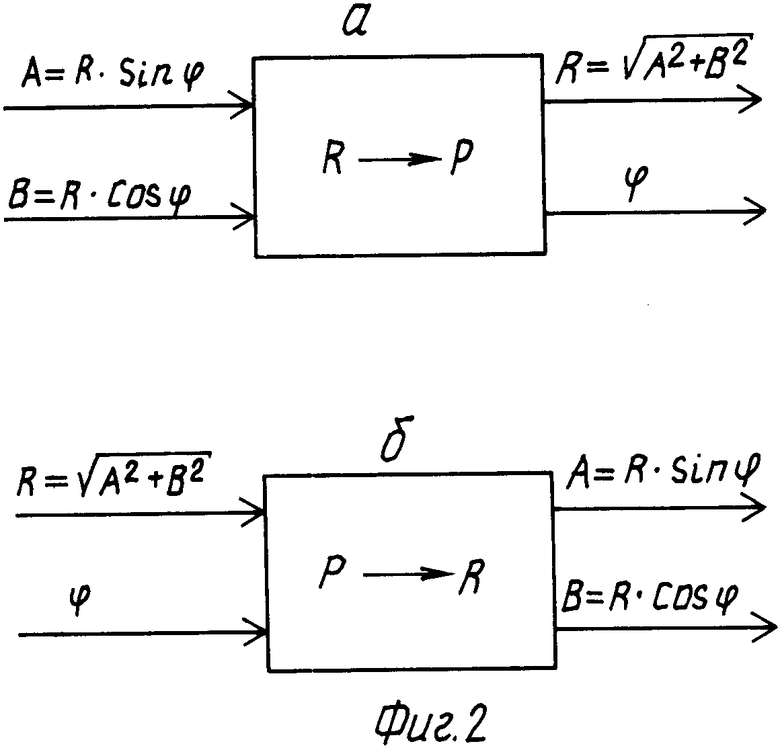
На фиг. 1 представлена функциональная схема системы; на фиг. 2 - (а) - преобразователи прямоугольных координат в полярные и (б) полярные в прямоугольные, функции которых выполняют любые вычислительные платы.
Система содержит три акселерометра 1-3, которые измеряют ускорение силы тяжести по трем взаимно перпендикулярным осям, и три феррозонда 4-6 для измерения проекций напряженности магнитного поля Земли. Акселерометры 1 и 2 подключены к преобразователю 7 прямоугольных координат в полярные, первый выход которого и выход третьего акселерометра 3 подключены к входам преобразователя 8 прямоугольных координат в полярные, первый выход которого подключен к входу индикатора 9 "Тест число акселерометров", а второй выход преобразователя 8 - к входу индикатора 9 "Зенитный угол" индикатора 9 непосредственно и через инвертор 10 к первому входу сумматора 11. Второй выход преобразователя 7 через инвертор 12 подключен к первому входу сумматра 13. Выходы первых двух феррозондов 4 и 5 подключены на входы 14 прямоугольных координат в полярные и преобразователя 15 прямоугольных координат в полярные, первый выход преобразователя 14 подключен к первому входу преобразователя 16, второй выход преобразователя 14 соединен с третьим входом сумматора 13, выход которого подключен к второму входу преобразователя 16, выход преобразователя 15 соединен с первым входом сумматора 17, второй вход которого и второй вход сумматора 13 подключены к задатчику 23 "Δ" , выход сумматора соединен с входом индикатора 9 "Азимут отклонителя", первый выход преобразователя 16 подключен к первому входу преобразователя 18 прямоугольных координат в полярные, второй выход преобразователя 16 соединен с первым входом преобразователя 19 прямоугольных координат в полярные, второй вход которого соединен с выходом феррозонда 6, один из выходов преобразователя 19 соединен с первым входом преобразователя 20 полярных координат в прямоугольные, другой выход преобразователя 19 соединен с вторым входом сумматора 11, выход последнего подключен к второму входу преобразователя 20, первый выход которого подключен к первому входу преобразователя 21, а второй выход преобразователя 20 соединен с вторым входом преобразователя 18, один из выходов которого соединен с вторым входом преобразователя 21, а другой выход соединен с входом индикатора 9 "азимут", вход "Тест число феррозондов" которого соединен через инвертор 22 с входом преобразователя 21.
Устройство работает следующим образом.
В процессе навигации забойный зонд, содержащий три взаимно перпендикулярных акселерометра и три взаимно перпендикулярных феррозондов, располагается по оси скважины.
Каждый из акселерометров измеряет проекции силы тяжести (или проекции ускорения силы тяжести) на соответствующую ось, а каждый из феррозондов - проекцию напряженности магнитного поля Земли на свою ось. Таким образом сигналы на входе устройства будут равны:
A1 = gxKа F1 = Ux1Kф
A2 = gyKа F2 = Uy1Kф
A3 = gzKа F3 = UzKф
где g - ускорение силы тяжести Земли;
U - напряженность магнитного поля Земли;
gx, gy, gz - проекции ускорения g на оси X, Y, Z;
Ux1, Uy1, Uz - проекции напряженности магнитного поля Земли на оси X1, Y1, Z;
X, Y - взаимно перпендикулярные оси, расположенные в плоскости, перпендикулярной оси скважины, которые являются осями чувствительности акселерометров A1 и A2 соответственно;
X1, Y1 - взаимно перпендикулярные оси, расположенные в плоскости, перпендикулярной оси скважины, которые являются осями чувствительности феррозондов F1 и F2 соответственно;
Z - ось скважины и одновременно ось чувствительности акселерометра A3 и феррозонда F3;
Kа, Kф - коэффициенты, установленные калибровкой;
Δ - угол сдвига между осями XY и X1Y2 соответственно.
Если блоки устройства - прямые и обратные преобразователи координат, сумматоры, инверторы и задатчики выполнены в виде аналоговых устройств, то сигналы с акселерометров и феррозондов могут быть в аналоговой форме, если эти устройства цифровые, то сигналы должны быть преобразованы в цифровую форму. Блоки устройства соединены таким образом, что реализуется алгоритм вычисления зенитного угла скважины, азимута скважины, угла установки отклонителя и азимута отклонителя. Кроме того, используя известные соотношения:
производится вычисление тест чисел акселерометров и феррозондов, т.е. const A и const F, которые должны быть постоянными, независимо от расположения забойного зонда. Величины Kа и Kф устанавливаются в процессе калибровки таким образом, чтобы тест числа был равен определенным удобным числам, например, 1000, 5000 и т.п.
По сигналам с акселерометров 1 и 2 преобразователь 7 прямолинейных координат в полярные производит определение угла установки отклонителя, величина которого индицируется на соответствующем входе индикатора 9.
По сигналам с акселерометра 3 и преобразователя 7 прямоугольных координат в полярные в преобразователе 8 полярных координат в прямоугольные определяется "Зенитный угол", с второго выхода преобразователя 8 сигнал поступает на вход индикатора 9 "Зенитный угол".
Сигналы с феррозондов 4 и 5 поступают на преобразователь 14 прямоугольных координат в полярные, с первого выхода которого сигнал идет на первый вход преобразователя 16 полярных координат в прямоугольные, а с второго выхода преобразователя 14 сигнал поступает на первый вход сумматора 13, на второй вход которого с задатчика 23 подается сигнал "Δ" , а на третий вход сумматора 13 через инвертор 12 от преобразователя 7 - со второго его выхода. Суммарный сигнал поступает на второй вход преобразователя 16 полярных координат в прямоугольные, с первого выхода которого преобразованный сигнал как проекция на горизонтальную ось подается на первый вход преобразователя 18 прямоугольных координат в полярные. На второй вход преобразователя 19 поступает сигнал с феррозонда 6, после этого в преобразователе 19 прямоугольных координат в полярные с учетом сигнала с второго выхода преобразователя 16 вычисляются два сигнала. Один с первого выхода как проекция на горизонтальную ось, который поступает на вход преобразователя 20 полярных координат в прямоугольные. Для дальнейшего преобразования необходимо сформировать сигнал, который поступает на второй вход преобразователя 20. Для этого сигнал "Зенитный угол" с выхода преобразователя 8 подают через инвертор 10 на первый вход сумматора 11, на второй вход которого поступает сигнал с преобразователя 19. Суммарный сигнал поступает на второй вход преобразователя 20. В последнем происходит преобразование двух входящих сигналов и с первого выхода преобразователя 20 снимается сигнал как проекция на горизонтальную ось, а со второго - как проекция на вертикальную ось, который в дальнейшем используется для определения "Азимут скважины". В преобразователе 18 формируется сигнал "Азимут скважины" с учетом сигналов с второго выхода с преобразователя 20 и с первого выхода преобразователя 16.
Для определения "Азимута отклонителя" необходимо преобразовать сигналы с феррозондов 4 и 5 и с задатчика "Δ" 23, сигналы с феррозондов 4 и 5 преобразуются в преобразователе 15 прямоугольных координат в полярные, выходной сигнал которого суммируется с сигналом от задатчика 23 "Δ" и на индикаторе высвечивается "Азимут отклонителя".
Сигнал с первого выхода преобразователя 20 подается на первый вход преобразователя 21 прямоугольных координат в полярные. На второй вход которого пойдет сигнал с первого выхода преобразователя 18. Выходной сигнал с преобразователя 21 через инвертор 22 поступает на индикатор 9, где будет высвечено "Тест число феррозондов".
"Тест число акселерометров" вычисляется по сигналам с акселерометра 3 и преобразователя 7 прямоугольных координат в полярные.
Таким образом данное предложение простыми техническими средствами определяет необходимые забойные параметры при бурении и геофизических исследованях.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТЕЛЕМЕТРИЧЕСКАЯ СИСТЕМА ПЕРЕДАЧИ И ПРИЕМА ИНФОРМАЦИИ В ПРОЦЕССЕ БУРЕНИЯ | 1996 |
|
RU2101489C1 |
| СПОСОБ ИЗМЕРЕНИЯ ОРИЕНТАЦИИ СТВОЛА СКВАЖИНЫ В ПРОЦЕССЕ БУРЕНИЯ И УСТРОЙСТВО ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2001 |
|
RU2204017C2 |
| ГИРОСКОПИЧЕСКАЯ ТЕЛЕМЕТРИЧЕСКАЯ СИСТЕМА КОНТРОЛЯ НЕФТЯНЫХ И ГАЗОВЫХ СКВАЖИН | 1996 |
|
RU2109137C1 |
| Способ определения зенитного угла и азимута скважины и гироскопический инклинометр | 2018 |
|
RU2682087C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВ НАПРАВЛЕНИЯ СКВАЖИНЫ | 2001 |
|
RU2198291C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ АЗИМУТА ОТКЛОНИТЕЛЯ В ПРОЦЕССЕ БУРЕНИЯ | 1994 |
|
RU2091577C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА И ЗЕНИТНОГО УГЛА СКВАЖИНЫ И ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 1999 |
|
RU2159331C1 |
| СПОСОБ ИЗМЕРЕНИЯ ТРАЕКТОРИИ СКВАЖИНЫ ПО АЗИМУТУ И ДВУХРЕЖИМНЫЙ БЕСПЛАТФОРМЕННЫЙ ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2269001C1 |
| ИНКЛИНОМЕТР | 2003 |
|
RU2250371C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВ ИСКРИВЛЕНИЯ СКВАЖИНЫ И ПОЛОЖЕНИЯ ОТКЛОНИТЕЛЯ ПРИ БУРЕНИИ | 2001 |
|
RU2184845C1 |
Изобретение относится к буровой технике, в частности к средствам контроля забойных параметров при бурении и гео- физических исследованиях скважин. Телеметрическая система контроля навигационных параметров траектории ствола скважин содержит три взаимно перпендикулярных акселерометра и три взаимно перпендикулярных феррозонда, которые располагаются по оси скважины. Каждый из акселерометров измеряет проекцию силы тяжести (или проекцию ускорения силы тяжести) на соответствующую ось, а каждый из феррозондов - проекцию напряженности магнитного поля Земли на свою ось. Блоки устройства соединены таким образом, что реализуется алгоритм вычисления зенитного угла скважины, азимута, угла установки отклонителя и азимута отклонителя. 2 ил.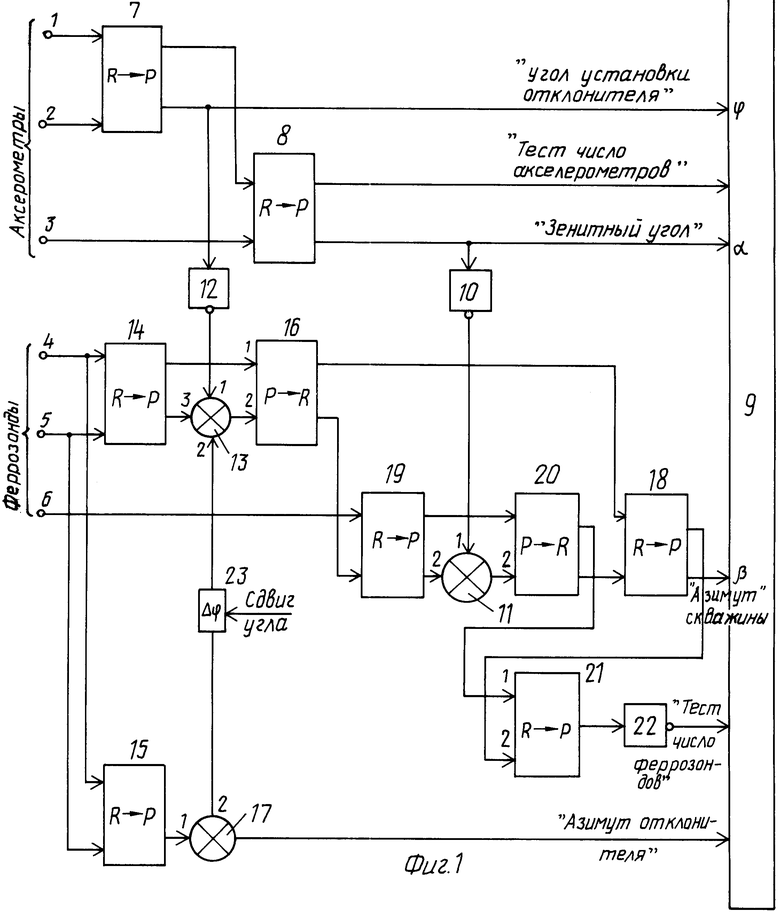
Телеметрическая система контроля параметров нефтяных и газовых скважин, содержащая наземный вычислитель и связанный с ним каротажным кабелем скважинный прибор, содержащий шесть измерительных датчиков, из которых три выполнены в виде акселерометров и три в виде феррозондов, отличающаяся тем, что наземный вычислитель выполнен на семи преобразователях прямоугольных координат в полярные, двух преобразователях полярных координат в прямоугольные, трех инверторах, трех сумматорах и индикаторе, при этом выходы первых двух акселерометров подключены к первому преобразователю прямоугольных координат в полярные, первый выход которого подключен к первому входу второго преобразователя прямоугольных координат в полярные, на второй вход которого подключен выход третьего акселерометра, второй выход первого преобразователя прямоугольных координат в полярные через первый инвертор подключен к первому входу первого сумматора, второй вход которого соединен с выходом задатчика "Δ" , где Δ - - угол сдвига между осями чувствительности соответственно двух акселерометров и двух феррозондов, выходы первого и второго феррозондов подключены к входам третьего преобразователя прямоугольных координат в полярные, первый выход которого подключен к первому входу первого преобразователя полярных координат в прямолинейные, а второй выход - к третьему входу первого сумматора, выход последнего соединен с вторым входом первого преобразователя полярных координат в прямоугольные, один из выходов которого соединен с первым входом четвертого преобразователя прямоугольных координат в полярные, а другой подключен к первому входу пятого преобразователя прямоугольных координат в полярные, второй вход которого соединен с выходом третьего феррозонда, а первый выход соединен с первым входом второго преобразователя полярных координат в прямоугольные, один из выходов второго преобразователя прямоугольных координат в полярные подключен к входу "Тест-число акселерометров" индикатора, а другой - к входу "Зенитный угол" индикатора непосредственно и через второй инвертор к первому входу второго сумматора, второй вход которого соединен с вторым выходом пятого преобразователя прямоугольных координат в полярные, а выход - с вторым входом второго преобразователя полярных координат в прямоугольные, первый выход которого соединен с первым входом шестого преобразователя прямоугольных координат в полярные, а второй подключен к второму входу четвертого преобразователя прямоугольных координат в полярные, один из выходов которого подключен к входу "Азимут скважины" индикатора, а другой - на второй вход шестого преобразователя прямоугольных координат в полярные, выход которого через третий инвертор подключен к входу "Тест-число феррозондов" индикатора, выходы первого и второго феррозондов через седьмой преобразователь прямоугольных координат в полярные подключены к первому входу третьего сумматора, второй вход которого соединен с выходом задатчика "Δ" а выход третьего сумматора подключен к входу "Азимут отклонителя" индикатора, при этом второй выход первого преобразователя прямоугольных координат в полярные подключен к входу "Угол установки отклонителя" индикатора.
| RU, патент 2030574, кл | |||
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Исаченко В.Х | |||
| Инклинометрия скважин | |||
| - М.: Недра, 1987, с.45 и 46. | |||
