1
Изобретение относится к измерительной технике и может быть использовано при разработке приборов для контроля зубчатых колес с эвольвентным профилем зуба.
Известные приборы для контроля эвольвентных поверхностей (эвольвентомеров), содержащие механизм воспроизведения образцовой эвольвенты, измерительно-отсчетное устройство, механизм настройки и оправку для установки контролируемого изделия, обеспечивает сравнение контролируемого профиля с образцовым. Однако наличие образцового эвольвентного кулака и высокоточного множительного устройства с переменным передаточным отношением усложняет такие приборы.
Цель изобретения - упрощение конструкции прибора и повышение точности и надежности контроля. Для этого механизм воспроизведения образцовой эвольвенты выполнен в виде растра с штрихами эвольвентной формы, установленного на оправке, и оптически сопряженного с ним линейчатого растра, установленного с возможностью прямолинейного перемещения в направлении, перпендикулярном оси оправки под действием контролируемой поверхности.
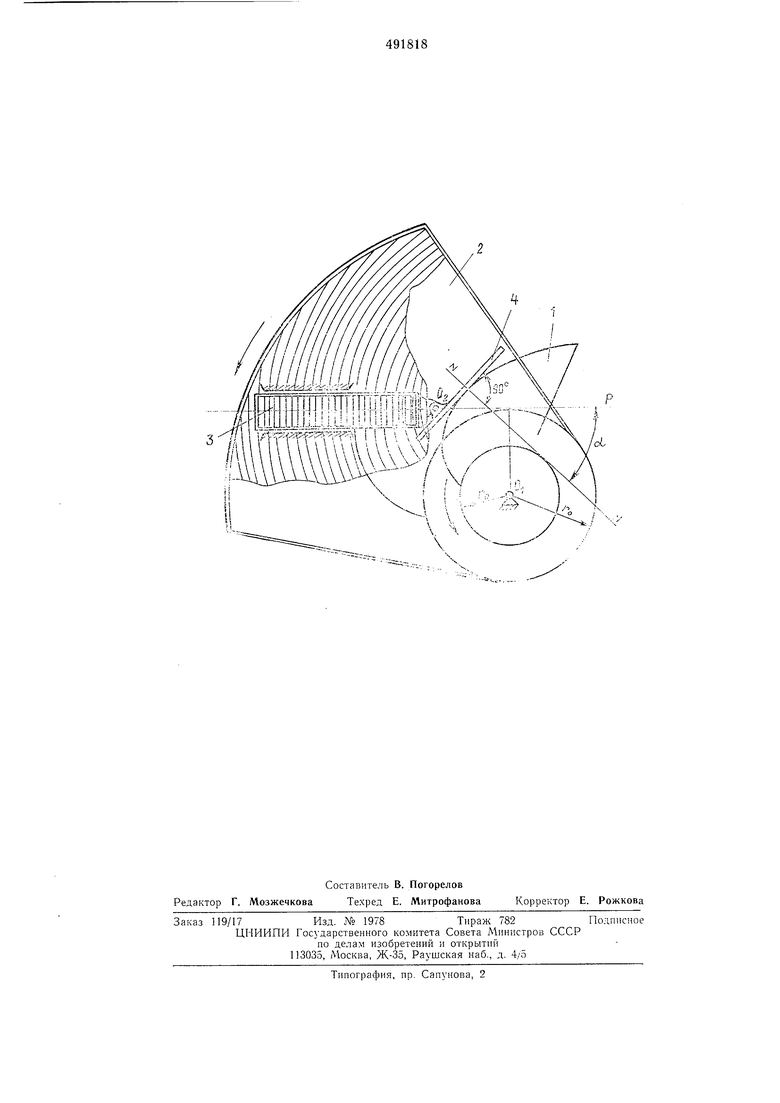
На чертеже показана схема предлагаемого прибора.
В исходном положении эвольвентный контролируемый кулак 1 и эвольвентный образовый растр 2 концентрично насажены на общую ось О, вокруг которой могут свободно вращаться. Линейчатый растр 3 расположен в прямолинейных направляющих и толкателем 4 постоянно поджат к контролируемому кулаку 1. Оптическое взаимодействие линейчатого растра с эвольвентным растром образует муаровые полосы, непосредственно наблюдаемые оператором. Необходимый угол
давления а рассчитывается по формулам, приведенным ниже, и выставляется поворотом толкателя 4 вокруг точки О его закрепления. Величины шагов линейчатого g и эвольвентного gz растров в общем случае могут
быть произвольными, однако не должно нарушаться известное условие их оптического взаимодействия с образованием муаровых полос. Работает устройство следующим образом.
Новорот контролируемого кулака 1 на некоторый yrOvT вызывает поворот эвольвентного растра 2 на тот же угол. При этом линейчатый растр 3, взаимодействуя через посредство толкателя 4 с контролируемым кулаком
1, перемещается в своих прямолинейных направляющих на некоторую величину.
В случае отсутствия погрешности контролируемого профиля при надлежащем выборе величины а муаровая картина, образованная
ДВУМЯ растрами, будет оставаться неподвижHoii относито.чыю стойки. Его условие выно.чпяется при рсшепствс гдеа - угол давления, 1 11 Го - радиусы основных окружностей соответственно эвол1,вентного растра II контролируемого кулака, Й1Й2 - величина шагов соответственно линейчатого и эвольвентиого растров. Таким образом, настройка эвольвенто.мера на заданный радиус основной окружности контролируемого кулака осуществляется уста ювкой угла ее, вычисленного в соответствии с равенство.м (1). Все остальные параметры схе.мы при этом остаются неизменными. В случае наличия погрешности контролируемого иро(1)пля муаровая картина не остается неподвижной, а смеиитется на величнну, которую -можно измерить любым известным способом. Смешение / муаровой полосы ири этих условиях пересчитывается на величину погрешности Л/ профиля по следуюшей зависимостигде А/ - величина погрешности профиля, / - наблюдаемое и измеряемое значение смешения муаровых полос. Для заданного значения го произведение л, ISi. г. /; ПОСТОЯННО. Обозначим его через /М, тогда выражение (2) иринимает вид Af-./ откуда следует, что величина .Л/ погрешности 11ро()иля ку.чака линеГпю зависит от величины / видимого перемешения муаровой картины. Ири этом значение постоянной М можно рассматривать как масштаб увеличения прибором ногрешности А/. Величину этого масштаба можно вычислить ii.i (юрму;1ы (3) откуда видно, что задаваясь различными отношениями gzfg, можно получить теоретически различные масштабы увеличения прибора. Практически масштаб М увеличения ограничивает только достижимой частотой и точностью нанесения штрихов обоих растров. При этом следует заметить, что координата муаровой полосы есть интегральный параметр, в котором случа П1ые погрешности нанесения о1де;П)Пых линий усредняются на некотором участке растра, т. е. погрешность нанесення отдельной лииии не влияет па точность отсчета ио.юження муаровой полосы. Фор М у л а и 3 о б р е т е н и я Прибор для контроля эвольвентных новерхпостей, содержашнй мехапиз.м воепроизведеппя образцовой эвольвеиты, оправку для установки коптролируемого изделия, измерительмо-отсчетиое устр01 ст1ю и механизм наетройкп, о т л и ч а ю ш и и с я тем, что, с целью упрошения конструкции прибора и повышения точности и надежности контроля, механизм воспроизведения образцовой эвольвенты выполнен в виде растра с штрихами эвольвентной формы, установленного на оправке, п оитпчески сопряженного е ним линейчатого растра, установленного с возможностью ирямолиГ|ейпого перемешения в направлении, перпендикулярном оси оправки под действием контролируемой поверхности.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения перемещений | 1988 |
|
SU1714342A1 |
| Прибор для контроля прерывной кинематической погрешности зубчатых колес | 1984 |
|
SU1232927A1 |
| Прибор для контроля прерывной кинематической погрешности зубчатых колес | 1987 |
|
SU1402796A2 |
| ПРИБОР ДЛЯ КОНТРОЛЯ ЗВОЛЬВЕНТНОГО ПРОФИЛЯ ЗУБЧАТЫХ КОЛЕС | 1972 |
|
SU349869A1 |
| Тест-объект | 1984 |
|
SU1210124A1 |
| Способ контроля совмещения красок при полиграфическом воспроизведении стереоскопических изображений и устройство для его осуществления | 1985 |
|
SU1313736A1 |
| Устройство для измерения погрешности профиля эвольвентной поверхности детали | 1973 |
|
SU518623A1 |
| Способ определения прерывной кинематической погрешности зубчатых колес | 1976 |
|
SU599154A1 |
| ПРИБОР ДЛЯ ПОВЕРКИ И АТТЕСТАЦИИ КРИВОЛИНЕЙНЫХ ЭВОЛЬВЕНТНЫХ ПОВЕРХНОСТЕЙ | 1971 |
|
SU304427A1 |
| СПОСОБ КОНТРОЛЯ РЕЛЬЕФА ПОВЕРХНОСТИ ОБЪЕКТА | 2003 |
|
RU2242714C2 |