(54) ПРЕДОХРАНИТЕЛЬНОЕ УСТРОЙСТВО
ЖАТКИ ЗЕРНОУБОРОЧНОГО КОМБАЙНА
Для увеличения скорости подъема жатки в процессе взаимодействия поворотного упора с опорной поверхностью платформы жатки плавающий поршень гидравлического цилиндра кинематической связи поворотного упора с механизмом подъема жатки выполнен с односторонним штоком, расположенным в постоянно сообщенной с распредлителем полости.
На фиг. 1 изображена жатка зерноуборечного комбай11а в рабочем положении с принципиальной схемой механизма гидрав.1яческого подъема и опускания жатки, общий вид; на фиг. 2 - то же, при наезде жатки комбайна на неровность рельефа
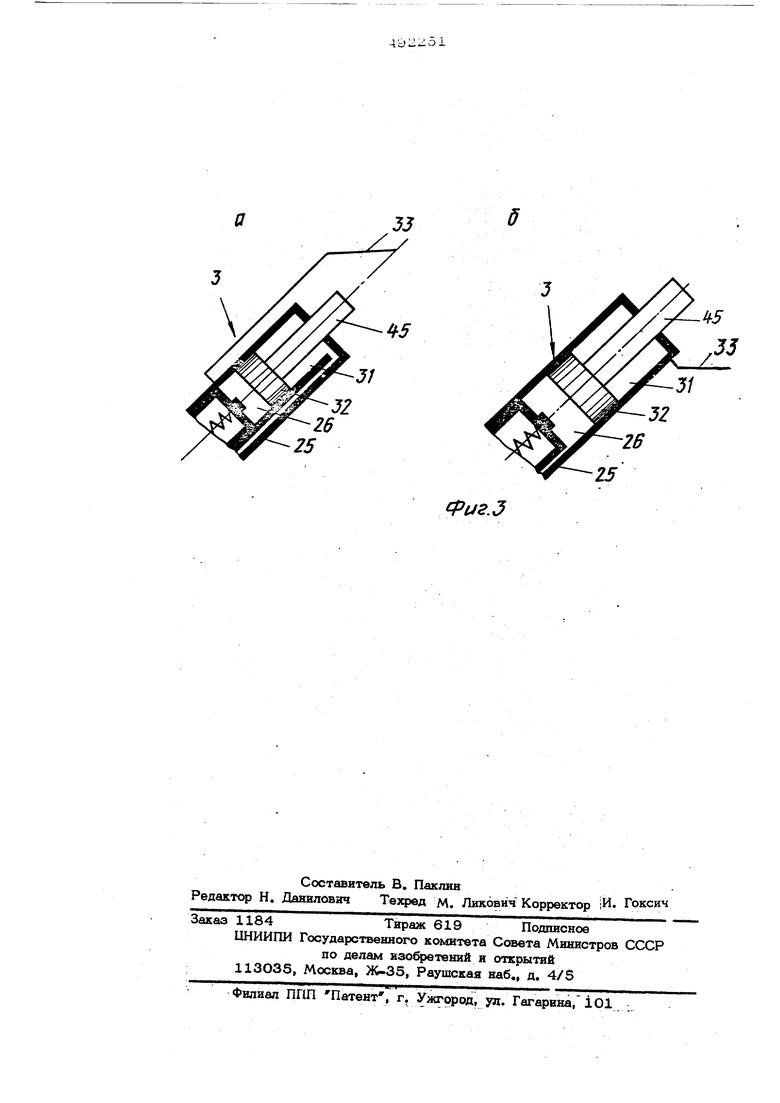
почвы; на фиг, 3 показан плавакяций поршень со штоком: а - для увеличения скорости подъема жатки, б для уменьшения скорости подъема жатки.
Предлагаемое предохранительное ycTj-JE ство содержит поворотный упор 1, распреде.татель 2и гидроцилиндр 3, смонтиро.ванные на корпусе наклонной камеры 4 жатки 5 с опорной поверхностью 6.
Упор 1 шарнирно соединен со штоком 7 распределителя 2 тягой 8 и через них удерживается в левом положении пружиной 9 относительно шарнира 10.
Распределитель 2 - двухпозисионный, в его продольном отверстии имеется три кольцевых полости 11-13. В кольцевой полости 13 установлена пружина 9. Кольцевая полость 12 каналом 14 и трубопров дом 15 сообщена с нагнетательным тру-бопровочом 16, кольцевая полость 1-1 каHiUioM 17 и трубопроводом 18 - со сливным трубопроводом 19. Поперечный канал 20 продольным каналсм 21 сообщен с каналом 17, а трубопроводом 22 - с распределителем 23 гидравлического меха низма ручного включения подгэма жатки. Поперечный канал 24 и продольный канал 25 соединяют распределитель с левой рабочей полостью 26 гидроцилиндра 3, размещенного с ним в общем корпусе.
На штоке 7 выполнены дье кольцевые проточки, образующие три кольцевые выступа 27-29. На кольцевом выступе 29, у правого торца штока 7, установлено в канавке упорное кольцо ЗО.
Правая рабочая полость 31 гидроцилиндра 3, отделенная от левой полости 26 плавакндим поршнем 32, сообщена трубопроводом 33 с трубопроводом 34, а через него - с рабочими полостями 35 гидроци шндров 36 подъема жатки и с распределителем 23 ручного гидромеханизма подъема.
При отсутствии ручного воздействия на рабочую секцию 37 распределителя 23 или
автоматического воздействия на шток 7 расп11еделителя 2 часть потока рабочей жидкости (поток управления) от источника давлений 38 по трубопроводам 16, 22,18 к 19 через дроссель 39 и канал 40 пеР1зливыой секции 41, а также через каналы 20, 21 vi 17 расиределителя 2 и проточку штока 7 перетекает в гидробак 42, открывая перзЛивную секцию 41 для основного потока, В результате этого ос« новной поток рабочей жидкости от источника давления 38 по трубопроводам 16, 19 открытую переливную секцию 41 распределителя 23 свободно перетекает в гидробак 42, При наезде жатки 5 (см фиг. 2) на участок поля с повышенным рельефом ее платформа, копируя рельеф поля башмаками 43, поднимается и, поворачиваясь ио часовой стрелке вокруг шарнира 44, нажимает опорной поверхностью 6 поворотный упор 1 и перемещает через тягу 8 шток 7 распределителя 2 вправо, сжимая пружину 9, В результате этого кольцевыми выступами шток 7 разобщает поперечный канал 20 распределителя 2, перекрывая этим проход потоку управления, разобщает кольцевую полость 11 от поперечного канала 24 и сообщает кольцевук)полость 12 через каналы 24 и 25 с левой полостью 26 гидроцияиндра Поэтому поток рабочей жидкости от источнике давления 38 по трубопроводам 16 и 15 через каналы 14, 24 и 25, полость 12 продольный канал 25 распределителя 2 поступает в левую рабочую полость 26 гидроцилиндра 3 и перемещае его поршень 32 вправо.
Из правой полости 31 рабочая жидкост порци ам 32 подается по трубопроводам 33 и 34 в рабочую полость 35 гидроци™ линдра 36 подъема, поднимая корпус наклонной камеры жатки 5, обеспечивая платформе жатки возможность свободно подниматься для копирования дальнейшего повышения рельефа поля.
Такое движение потока рабочей жидкости и перемещение элементов жатки 5 происходит до тех пор, пока платформа копирует повышение рельефа поля.
При съезде жаткой 5 в пониженные частки поля ее платформа, копируя рель- еф башмаками 43, опускается и поворачиваясь против часовой стрелки вокруг шарнира 44, освобождает поворотный упор 1 (фиг. 1) с тягой 8 и штоком 7, который под действием пружины 9 перемешается влево до упора кольца 30 в торец кольцевого выступа корпуса 2 распределителя. В результате этого кольцевые проточки штока 7 сообщаются с попереЧ1ным каналом 20 распределителя 2, откры вая проход потоку управления, соединяют кольцевую полость 11с поперечным каналом 17, а кольцевой выступ штока 7 разобщает кольцевую полость 12 от поперечного канала 24„ Поэтому поток управ ления и основной поток рабочей х идкости перетекают свободно от источника давле- ния 38 в гидробак 42,. Рабочая жидкость под действием веса жатки 5 вытесняется из рабочей полости 35 гидроцилиндра 36 подъема по трубо- проводам 34 и 33 в правую полость 31 гидроцилиндра 3 и перемещает поршень 32 влево до упора, выталкивая жидкость из левой полости 26 в гидробак 42 через каналы 25, 24 и 17, кольцевую полость 1 распределителя 2 и трубопроводы 18 и 19 Это позволяет корпусу наклонней камеры 4 автоматически опускаться и устанав.ливатЬ ся в первоначальное положение ( до автоматического подтзвма). Первоначальное положение обусловлено постоянством объема рабочей жидкости, находящейся в рабочей полост- 35 гидро- цилиндра 36, в правой полости 31 гидро цилиндра 3 и в трубопроводах 33 и 34. Поднимается жатка, т.е. переводится из рабочего в транспортное положение, и опускается вручную воздействием на золот ник рабочей секции 37, распределителя 23 Плавающий поршень 32 гидроцилиндра имеет шток 45 (см. фиг. 3). Такая кон струкция гидроцилиндра позволяет получит автоматическую скорость подъема жатки ,больше или меньше, чем скорость подъема ее при ручном включении из-за разности объемов бесштоковой левой 26 и штоковой правой 31 рабочих полостей гидроцилиндра Таким образом, каждый раз, когда пла форма жатки приближается к корпусу накл ной камеры на опорное расстояние, автоматически включается механизм гидравли ческого подъема жатки, и наоборот, когда такой опасности нет, предохранительное устройство автоматически дает сигнал на опускание жатки до первоначального положения. Предлагаемое предохранительное устройство, кроме того, облегчает труд водителя комбайна, который ужэ не следит за изменением рельефа поля даже при вы- ;соких скоростях работы комбайна. Формула изобретения . Предохранительное устройство жатки 1зерноуборочного комбайна, содержащее ме™ ханизм гидравлического подъема жатки в совокупности с гидравлическими щ линдра- ми и закреплешаш на корщсе наклонной : камеры ограничительный jnnop, взаимодей:ствующий с опорной поверхпостью платфорт :мы жатки при предельно допустимом пово{эоте ее относительно корпуса наклонной {камеры, отличающееся тем, что, с целью предотвращения деформации платформы жатки и корпуса наклонной камеры при работе комбайна на поле, неровности рельефа которого превышают диадазон копирования жатки, огран {чительный упор выполнен поворотным и кинематически связан с механизмом гидравличесiKoro подъема жатки. 2. Устройство по п„ 1, о т л и ч а ю;щ е е с я тем, что кинематическая связь ; поворотного jTiopa с механизмом гидрав- 1лического подъема жатки содержит гидрав- одический цилиндр с плавающим поршнем |и распределитель с подпружиненным штоком, управляемым поворотным упором, причем ;одна торцовая поверхность плавающего лоршня постоянно сообщается с рабочими шолостями гидравлических цилиндров ме- рсанизма подъема жатки, а другая через {подпружиненный шток - с источником дав ления при взаимодействии упора с опорной (поверхностью платформы жатки, или со слиIBOM при отсутствии взаимодействия упора 1с опорной поверхностью, платформы жатки. I 3. Устройство по пп. 1 и 2, о т л и|чающееся тем, что, с целью уве личения скорости подъема жатки в процес- се взаимодействия поворотного упора с :Онорной поверхностью платформы жатки, (плавающий поршень гидравлического циР ндра кинематической связи поворотного ора с механизмом подъема жатки выполнен с односторонним штоком, располч жен ным в постоянно сообщенной с распределд|телем полости.
S5I
,
Ni
32
26
25
сриг.д

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического копирования рельефа поля жаткой комбайна | 1988 |
|
SU1613034A2 |
| ГИДРОСИСТЕМА ЗЕРНОУБОРОЧНОГО КОМБАЙНА | 2001 |
|
RU2209540C2 |
| ГИДРОСИСТЕМА ЗЕРНОУБОРОЧНОГО КОМБАЙНА | 2009 |
|
RU2398374C1 |
| ГИДРОСИСТЕМА ЗЕРНОУБОРОЧНОГО КОМБАЙНА | 2001 |
|
RU2210202C2 |
| САМОХОДНАЯ УБОРОЧНАЯ МАШИНА | 1988 |
|
RU2040881C1 |
| Устройство для автоматического копирования рельефа поля жаткой комбайна | 1982 |
|
SU1080780A1 |
| Гидравлический привод рабочих органов | 1973 |
|
SU475970A1 |
| Механизм подъема мотовила сельскохозяйственных машин | 1982 |
|
SU1055403A1 |
| Гидропривод стрелы экскаватора | 1989 |
|
SU1661479A1 |
| Гидросистема специального оборудования транспортно-заряжающей машины на колесном шасси | 2021 |
|
RU2787601C1 |