Изобретение относится к технике изготовления полупроводниковых лриборов.
Известные микроманипуляторы, преимущественно для устройств прецизионного совмещения при изготовлении полупроводниковых микросхем, содержащие пластинодержатель, закрепленный на валу, расположенный в стакане, снабженный фланцем, механизмы перемещения пластинодержателя в двух взаимно перпендикулярных ,в горизонтальной плоскости направлениях, механизм перемещения пластинодержателя в вертикальной плоскости, .механизм поворота пластины вокруг вертикальной оси, выполненный в виде несущего кольца € торцовым выступом и с направляющими, и механизм управления микроманипулятором, не обеспечивают получение нео бходимой точности совмещения.
В предлагаемом микроманипуляторе, с целью повышения точности Совмещения, в несущем кольце механизма поворота выполнена кольцевая проточка, причем между наружной поверхностью стакана и кольцевой проточкой расположены шарики, между фланцем стакана и торцовым выступом несущ его кольца также расположены щарики, а нижний торец стакана охвачен втулкой и обоймой, внутри которой размещены подпружиненные элементы качения, например шарики, упирающиеся в нижний торец несущего кольца.
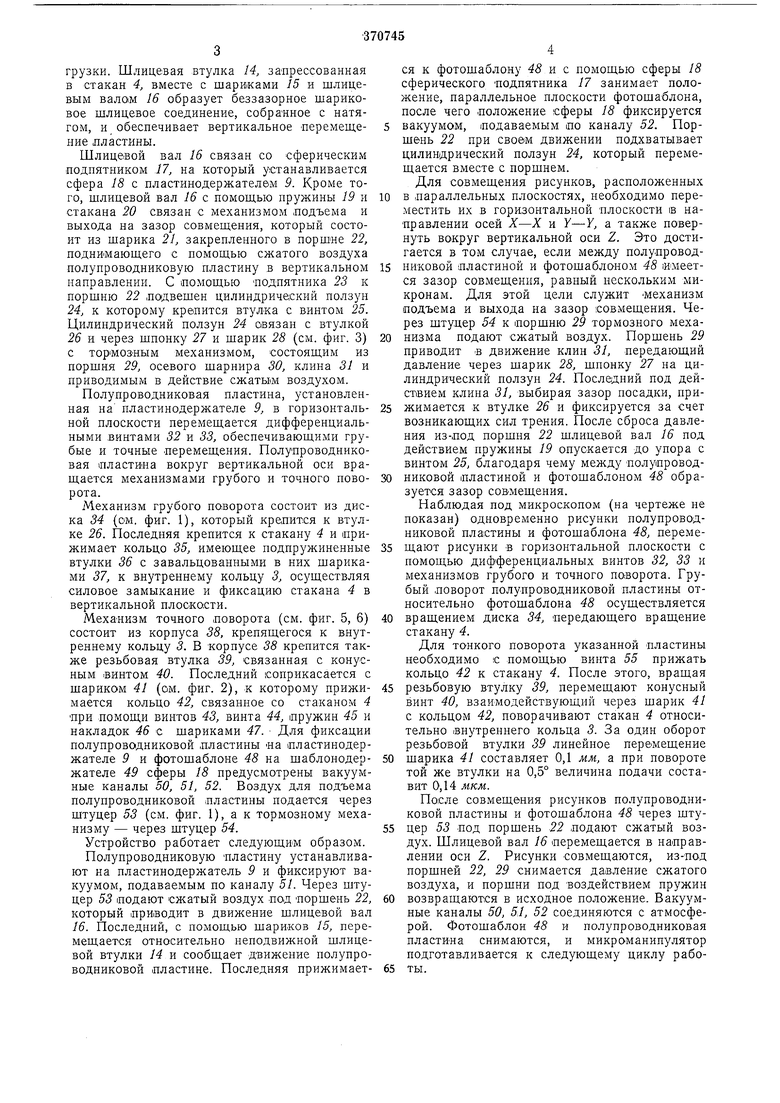
На фиг. 1 схематически показан .предлагаемый микроманипулятор, продольный разрез; на фиг. 2 - то же, сечение по Л-А на фиг. 1; на фиг. 3 - то же, сечение по Б-Б
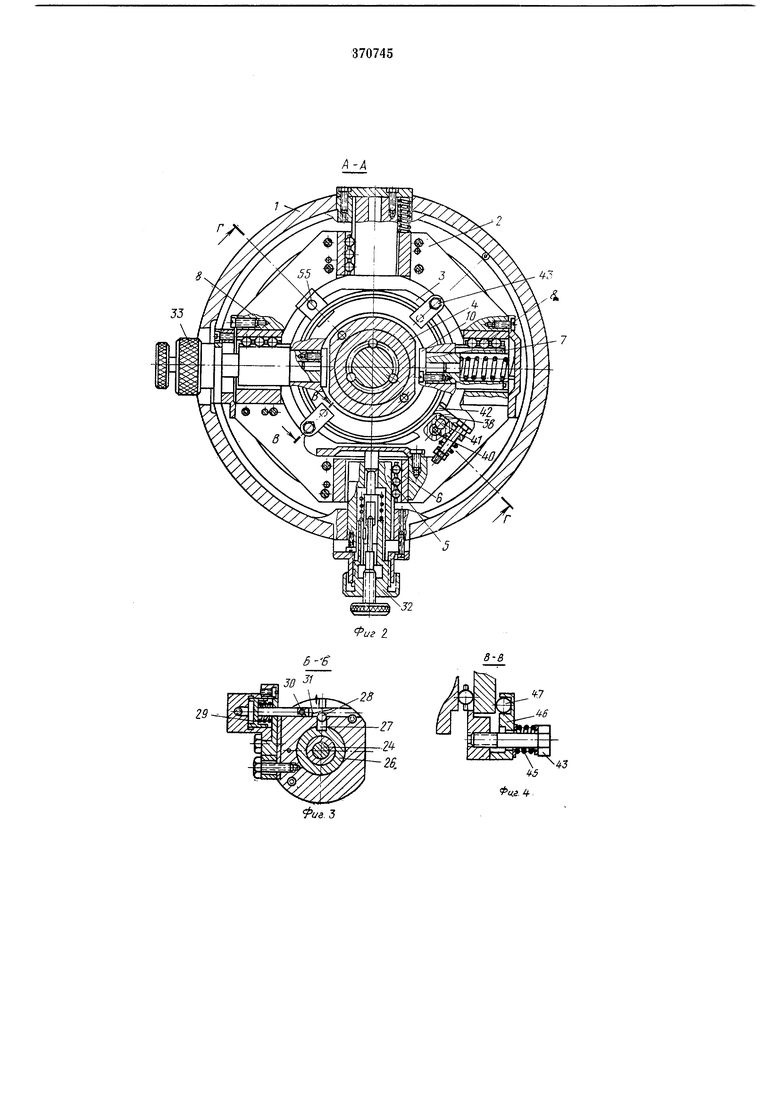
на фиг. 1; на фиг. 4 - то же, сечение по В-В на фиг. 2; на фиг. 5 - то же, сечение по Г-Г на фиг. 2; на фиг. 6 показан механизм точного поворота; на фиг. 7 - то же, сечение ло Д-Д на фиг. 6.
Микроманипулятор содержит корпус /, крестовину 2 (см. фиг. 2), внутреннее кольцо 3, стакан 4. В корпусе / установлены щлицевые валы 5, связанные с крестовиной 2 при помощи двух щлицевых втулок 6. Шлицевые валы 5 VI 7, шарики 8 и шлицевые втулки 6 образуют направляющие - беззазорные щариковые щлицевые соединения, собранные с «атягом в несколько микрон. Эти направляющие служат для перемещения полупроводниковой
пластины (на чертеже не показана) на пластинодержателе 9 в горизонтальной плоскости. Внутреннее кольцо 5 с помощью шариков 10, расположенных в сепараторах 12, 13, связано со стаканом 4, который служит для поворота полупроводниковой -пластины. Кольцевой ряд щариков 10 служит для восприятия тордовых нагрузок. Между внутренним кольцом 5, кольцевым рядом щариков // и стаканом 4 осуществлен натяг в несколько микрон.
Это соединение воспринимает радиальные нагрузки. Шлицевая втулка 14, запрессованная в стакан 4, вместе с шариками 15 и шлицевым валам 16 образует беззазорное шариковое шлицевое соединение, собранное с натягом, и обеспечивает вертикальное -перемещение пластины.
Шлицевой вал 16 связан со сферическим подпятником 17, на который устанавливается сфера 18 с пластинодержателем 9. Кроме того, шлицевой вал 16 с помош,ью пружины 19 и стакана 20 связан с механизмом лодъема и выхода на зазор совмеш,ения, который состоит из шарика 21, закрепленного в порш«е 22, подни1маюш,его с помощью сжатого воздуха полупроводниковую пластину в вертикальном направлении. С помощью подпятника 23 к поршню 22 подвешен цилиндриче:ский ползун 24, к которому крепится втулка с винтом 25. Цилиндрический ползун 24 связан с втулкой 26 и через шпонку 27 и шарик 28 (см. фиг. 3) с тормозным механизмом, состоящим из поршня 29, осевого шарнира 30, клина 31 и приводимым в действие сжатым воздухом.
Полупроводниковая пластина, установленная на пластинодержателе 9, в горизонтальной плоскости перемещается дифференциальными винтами 32 и 33, обеспечивающими грубые и точные перемещения. Полупроводниковая пластина вокруг вертикальной оси вращается механизмами грубого и точного поворота.
Механизм грубого поворота состоит из диска 34 {см. фиг. 1), который крепится к втулке 26. Последняя крепится к стакану 4 и прижимает кольцо 35, имеющее подпружиненные втулки 36 с завальцованными в них шариками 37, к внутреннему кольцу 3, осуществляя силовое замыкание и фиксацию стакана 4 в вертикальной плоскости.
Механизм точного поворота (см. фиг. 5, 6) состоит из корпуса 38, крепящегося к внутреннему кольцу 3. В корпусе 38 крепится также резьбовая втулка 39, связанная с конусным .винтом 40. Последний соприкасается с шариком 41 (ом. фиг. 2), к которому прижимается кольцо 42, связанное со стаканом 4 при помощи винтов 43, винта 44, пружин 45 и накладок 46 с шариками 47. Для фиксации полупроводниковой пластины па пластинодержателе 9 и фотощаблоне 48 на шаблонодержателе 49 сферы 18 предусмотрены вакуумные каналы 50, 51, 52. Воздух для подъема полупроводниковой пластины подается через штуцер 53 (см. фиг. 1), а к тормозному механизму - через щтуцер 54.
Устройство работает следующим образом.
Полупроводниковую пластину устанавливают на пластинодержатель 9 и фиксируют вакуумом, подаваемым по каналу 51. Через штуцер 53 подают сжатый воздух под поршень 22, который приводит в движение шлицевой вал 16. Последний, с помощью шариков 15, перемещается относительно неподвижной шлицевой втулки 14 и сообшает движение полупроводниковой пластине. Последняя прижимается к фотошаблону 45 и с помощью сферы 18 сферического подпятника 17 занимает положение, параллельное плоскости фотошаблона, после чего положение сферы 18 фиксируется
вакуумом, подаваемым по каналу 52. Поршень 22 при своем движении подхватывает цилиндрический ползун 24, который перемещается вместе с поршнем. Для совмещения рисунков, расположенных
в параллельных плоскостях, необходимо переместить их в горизонтальной плоскости IB направлении осей X-X и У-Y, а также повернуть вокруг вертикальной оси Z. Это достигается в том случае, если между полупроводниковой пластиной и фотощабло-ном 48 имеется зазор совмещения, равный нескольким микронам. Для этой цели служит механизм подъема и выхода на зазор совмещения. Через штуцер 54 к поршню 29 тормозного механизма подают сжатый воздух. Поршень 29 приводит в движение клин 31, передающий давление через шарик 28, шпонку 27 на цилиндрический ползун 24. Последний под действием клина 31, выбирая зазор посадки, прижимается к втулке 26 и фиксируется за счет возникающих сил трения. После сброса давления из-под поршня 22 шлицевой вал 16 под действием пружины 19 опускается до упора с винтом 25, благодаря чему между полупроводниковой пластиной и фотошаблоном 48 образуется зазор совмещения.
Наблюдая под микроскопом (на чертеже не показан) одновременно рисунки полупроводниковой пластины и фотошаблона 48, перемещают рисунки в горизонтальной плоскости с помощью дифференциальных винтов 32, 33 и механизмов грубого и точного поворота. Грубый поворот полупроводниковой пластины отпосительно фотошаблона 48 осуществляется
вращением диска 34, передающего вращение стакану 4.
Для тонкого поворота указанной пластины необходимо с помощью винта 55 прижать кольцо 42 к стакану 4. После этого, вращая
резьбовую втулку 39, перемещают конусный винт 40, взаимодействующий через шарик 41 с кольцом 42, поворачивают стакан 4 относительно внутреннего кольца 5. За один оборот резьбовой втулки 39 линейное перемещение
шарика 41 составляет 0,1 мм, а при повороте той же втулки на 0,5° величина подачи составит 0,14 мкм.
После совмешения рисунков полупроводниковой пластины и фотошаблона 48 через штуцер 53 под поршень 22 подают сжатый воздух. Шлицевой вал /5 перемещается в направлении оси Z. Рисунки совмещаются, из-под порщней 22, 29 снимается давление сжатого воздуха, и поршни под воздействием пружин
возвращают ся в исходное положение. Вакуумные каналы 50, 51, 52 соединяются с атмосферой. Фотошаблон 48 и полупроводниковая пластина снимаются, и микроманипулятор подготавливается к следующему циклу работы.
Предмет изобретения
Микроманипулятор, лреимущественно для устройств прецизионного совмещения при изготовлении .полупроводниковых микросхем, содержащий пластинодержатель, закрепленный на валу, расположенный s стакане, снабженный фланцем, механизмы перемещения пластинодержателя в двух взаимно перпендикулярных в горизонтальной плоскости направлениях, Механизм перемещения пластинодержателя в вертикальной плоскости, механизм поворота .пластины вокруг вертикальной оси, выполненный в виде несущего кольца с торцовым выступом и с направляющими, и механизм управления микроманилулятором, отличающийся тем, что, с целью повышения точности совмещения, в несущем кольце механизма поворота выполнена кольцевая проточка, причем между наружной поверхностью стака.на и кольцевой проточкой расположены шарики, между фланцем стакана и торцовым выступом несущего кольца также расположены шарики, а нижний торец стакана охвачен втулкой и обоймой, внутри которой размещены подпружиненные элементы качения, например шарики, упирающиеся в нижний торец несущего кольца.
| название | год | авторы | номер документа |
|---|---|---|---|
| Микроманипулятор | 1973 |
|
SU493053A1 |
| МИКРОМАНИПУЛЯТОР | 1972 |
|
SU327537A1 |
| Рулевое управление трактора | 1984 |
|
SU1221002A1 |
| Устройство для совмещения фотошаблона с подложкой | 1982 |
|
SU1053188A1 |
| Устройство для торцового шлифования | 1985 |
|
SU1291381A1 |
| УСТРОЙСТВО для СОВМЕЩЕНИЯ РИСУНКА Фо|с1Щ^ЛрНА '• I С РИСУНКОМ подложки ПРИ КОНТАКТНОЙ ФОТОПЕЧ/СТЙ-^ | 1967 |
|
SU190210A1 |
| Соосный несущий винт винтокрылого летательного аппарата | 2021 |
|
RU2756861C1 |
| АВТОМАТ ДЛЯ ПОДРЕЗАНИЯ ТОРЦА ЦИЛИНДРИЧЕСКИХ ДЕТАЛЕЙ ТИПА ТОНКОСТЕННЫХ СТАКАНОВ -. | 1970 |
|
SU275643A1 |
| Двухпольная установка совмещения и экспонирования | 1967 |
|
SU307697A1 |
| Предохранительная фрикционная муфта | 1976 |
|
SU597879A1 |

/7 IS
Л
J
32
29
3-3
ЛЛ
МЦ. -HF
ИГ
Фиг
