Изобретение относится к захватным устройствам и может быть использовано )з качестве захватных устройств манипуляторов промьгашенных роботов и других механизмов для захватывания и перемещения изделий легкой промышленности, имеющих пространственную форму, например заготовка верха обуви. .
Цель изобретения - расширение технологических возможностей.
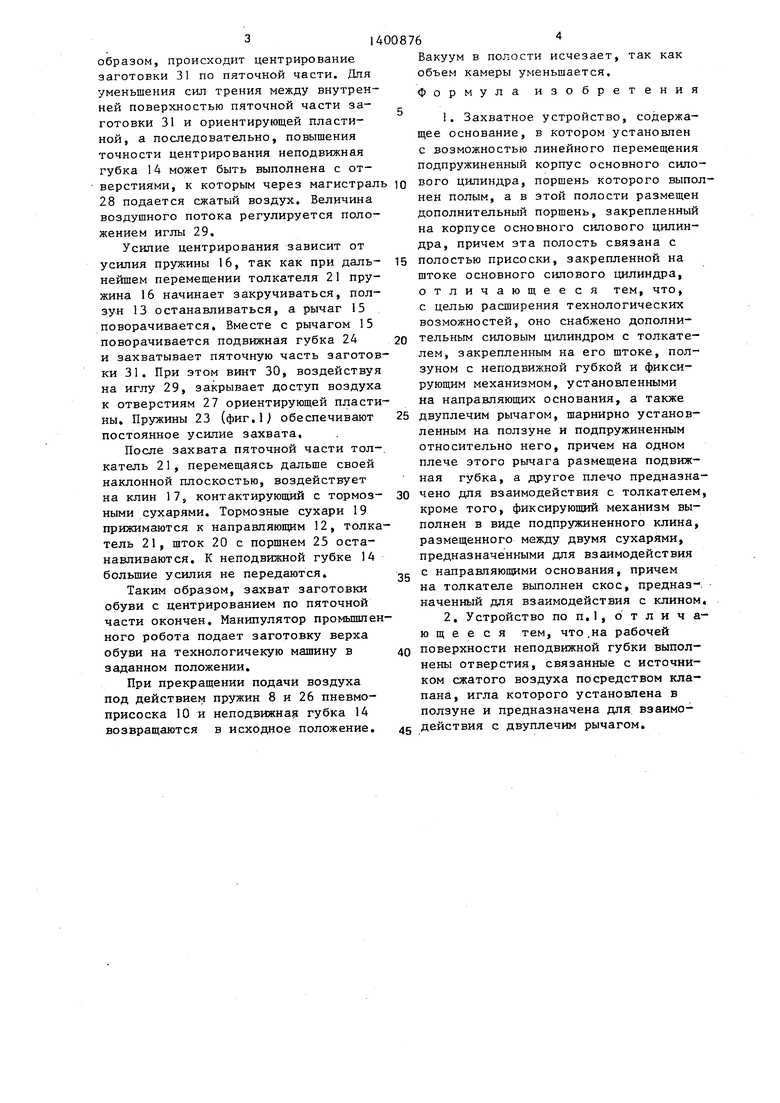
На фиг.1 изображено устройство, вид сбоку в разрезе; на фиг.2 - то же вид сверху; на фиг.З - разрез А-А на фиг,1; на фиг.4 - конструктивная схема неподвижной губки с отверстиями для подачи воздуха.
Захватное устройство состоит из основного силового цилиндра 1, фиксируемого наружной пружиной 2 и посаженного в корпус 3 с возможностью поворота на подшипнике 4. К крышке 5 цилиндра 1 прикреплен поршень 6, рас- положенньй в полости полый поршень 7, подпружиненный пружиной 8. К полому поршню 7 закреплен шток 9 с присоской 10„ Полость присоски 10 сообщена с внутренней полостью полого поршня 7 На корпусе 3 закреплены дополнитель- ный силовой цилиндр 11 и направляющие 12, по которым скользит ползун 13, К последнему закреплена неподвижная губка 14, На ползуне 13 также смонтированы двуплечий рычаг 15, подпру- жиненный пружиной 16, и клин 17 подпружиненный пружиной 18, Клин 17 взаимодействует с тормозными сухарями 19, контактрирующими с направляющими 12, К штоку 20 дополнительного силового цилиндра 11 шарнирно закреплен толкатель 21, скользящий по направляющей пластине 22, На рычаге 15 смонтирована подпружиненная пружинами 23 подвижная губка 24. Неподвиж- ная 14 и подвижная 24 губки выполнены по форме пяточной части заготовки верха обуви. Поршень 25 цилиндра II подпружинен пружиной 26.
Устройство может быть использо- вано с подвижной губкой, выполненной с отверстиями 27, сообщающимися с магистралью 28 сжатого воздуха, которая перекрывается иглой 29 при нажатии винтом 30, находящимся на рыча ге 15, Устройство закрепляется к руке манипулятора.
Устройство работает следующим образом.
0
5
0 5 О Q д
5
Заготовка верха обуви 31 базируется на позиции захвата по носочной части. При этом ввиду коробленно- сти и различий в размерах заготовок, а также погрешности ориентации положение их пяточной части неопределены. С помощью манипулятор а промышленного робота (не показан) устройство подводится к заготовке таким образом, что пневмоприсоска 10 находится над центром носочной части, а неподвижная губка 14 входит в проем заготовки, Б полость цилиндра 1 подается сжатый воздух, под действием которого полый поршень 7 вместе со штоком 9 и пневмоприсоской 10 перемещается вниз. При этом воздух из полости присоски 10 по отверстию в штоке 9 поступает в полость полого поршня 7, пружина 8 сжимается. Перемещение происходит до соприкосновения присоски 10 с носочной частью заготовки верха обуви 31. Так как полость присоски 10 замыкается поверхностью заготовки 31, в ней образуется вакуум. После остановки штока 9 вакуум поддерживается за счет того, что давление сжатого воздуха передается через крышку 5 на поршень 6 и цилиндр 1, которые стремятся перместиться вверх, так как цилиндр 1 подпружинен пружиной 2 и имеет свободу перемещения в вертикальном направлении. Одновременно, сжатый воздух подается и в бес- штоковую полость пневмоцилиндра 11, При этом по.ршень 25 со штоком 20, перемещаясь вправо воздействует на толкатель 21, Пружина 26 сжимается. Толкатель 21, перемещаясь в направляющих 22, воздействует на плечо рычага 15, Так как рычаг 15 подпружи--. - ней, усилие передается через него на ползун 13, который перемещается по направляющим 12. Вместе с ним по направляющим 12 перемещается и неподвижная губка 14. Перемещение происходит до соприкосновения неподвижной губки 14 с пяточной частью заготов ки 31 .
Так как неподвижная губка 14 имеет форму пяточной части заготовки, п ри наличии смещения последней заготовка 31 поворачивается вместе с узлом присоски на подшипнике 4 и ориентируется вдоль продольной оси устройства. Деформация и короблен- ность заготовки устраняется. Таким
образом, происходит центрирование заготовки 31 по пяточной части. Для уменьшения сил трения между внутренней поверхностью пяточной части заготовки 31 и ориентирующей пластиной, а последовательно, повышения точности центрирования неподвижная губка 14 может быть выполнена с отверстиями, к которым через магистрал 28 подается сжатый воздух. Величина воздушного потока регулируется положением иглы 29.
Усилие центрирования зависит от усилия пружины 16, так как при даль- нейшем перемещении толкателя 21 пружина 16 начинает закручиваться, ползун 13 останавливаться, а рычаг 15 поворачивается. Вместе с рычагом 15 поворачивается подвижная губка 24 и захватывает пяточную часть заготовки 31. При этом винт 30, воздействуя на иглу 29, закрывает доступ воздуха к отверстиям 27 ориентирующей пластины. Пружины 23 (фиг.П обеспечивают постоянное усилие захвата.
После захвата пяточной части тол- катель 21, перемещаясь дальше своей наклонной плоскостью, воздействует на клин 17j контактирующий с тормоз- ными сухарями. Тормозные сухари 19 прижимаются к направляющим 12, толкатель 21, шток 20 с поршнем 25 останавливаются, К неподвижной губке 14 большие усилия не передаются.
Таким образом, захват заготовки обуви с центрированием по пяточной части окончен. Манипулятор промыпшен ного робота подает заготовку верха обуви на технологичекую машину в заданном положении.
При прекращении подачи воздуха под действием пружин 8 и 26 пневмо- присоска 10 и неподвижна губка 14 возвращаются в исходное положение,
5 0 5
0
0
5
5
Вакуум в полости исчезает, так как объем камеры уменьшается. Формула изобретения
1. Захватное устройство, содержащее основание, в котором установлен с возможностью линейного перемещения подпружиненный корпус основного силового цилиндра, поршень которого выполнен полым, а в этой полости размещен дополнительный поршень, закрепленный на корпусе основного силового цилиндра, причем эта полость связана с полостью присоски, закрепленной на штоке основного силового цилиндра, отличающееся тем, что, с целью расширения технологических возможностей, оно снабжено дополнительным силовым цилиндром с толкателем, закрепленным на его штоке, ползуном с неподвижной губкой и фиксирующим механизмом, установленными на направляющих основания, а также двуплечим рычагом, шарнирно установленным на ползуне и подпружиненным относительно него, причем на одном плече этого рычага размещена подвижная губка, а другое плечо предназначено дпя взаимодействия с толкателем, кроме того, фиксирующий механизм выполнен в виде подпружиненного клина, размещенного между двумя сухарями, предназначенными для взаимодействия с направляющими основания, причем на толкателе выполнен скос, предназ-. наченный для взаимодействия с клином. 2, Устройство по п,1, о т л и ч а- ю щ е е с я тем, что.на рабочей поверхности неподвижной губки выполнены отверстия, связанные с источником сжатого воздуха посредством клапана, игла которого установлена в ползуне и предназначена для взаимодействия с двуплечим рычагом.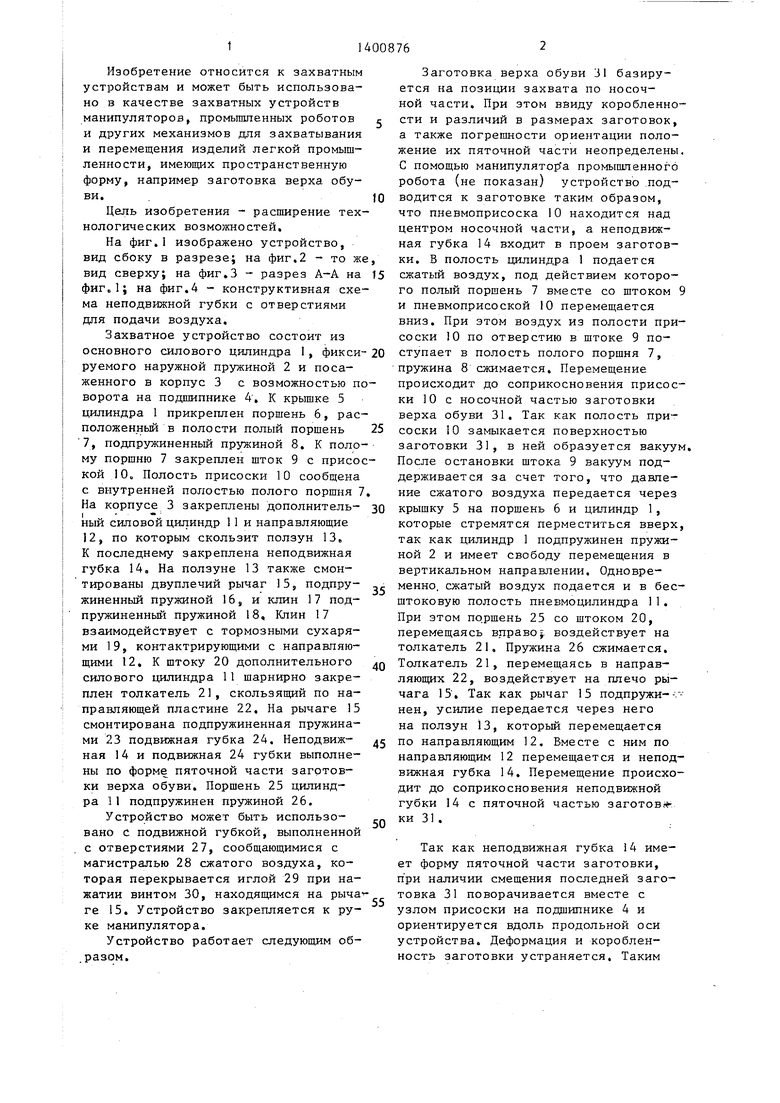
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОБТЯЖКИ И ЗАТЯЖКИ НОСОЧНО-ГЕЛЕНОЧНОЙ ЧАСТИ ОБУВИ | 2007 |
|
RU2365320C2 |
| Полуавтомат для клеевой затяжки кромки заготовки обуви | 1959 |
|
SU126761A1 |
| Полуавтомат для формования и сушки носочной части заготовки рантовой обуви | 1959 |
|
SU125166A1 |
| Устройство для внутреннего формования верха обуви | 1975 |
|
SU557788A1 |
| Машина для формования пяточной части заготовки верха обуви | 1984 |
|
SU1266515A1 |
| Машина для обтяжки геленочной части заготовки верха обуви | 1985 |
|
SU1429925A3 |
| Поточная линия для сборки заготовки верха обуви | 1981 |
|
SU1233853A1 |
| Пресс для приклеивания подошв к обуви | 1989 |
|
SU1666049A1 |
| Машина для затяжки носочно-пучковой части обуви | 1990 |
|
SU1729433A1 |
| Автоматический комплекс для сборки обуви | 1985 |
|
SU1384315A1 |
Изобретение относится к захватным устройствам и может быть использовано в качестве захватных устройств манипуляторов для захватывания и перемещения изделий, имеющих пространственную форму, например заготовки верха обуви. Целью изобретения является расширение технологических возможностей. Устройство подводится к заготовке. Присоска устанавливается над носочной частью. В пояость силового цилиндра I подается сжатый воздух, присоска 10 опускается на заготовку. Сжатый воздух подается в силовой цилиндр 11. Толкатель 21, перемещаясь в направляющих, воздействует через рычаг 15 на ползун 13, который перемещается до контакта с неподвижной губкой 14. Ползун 13 останавливается, рычаг 15 поворачивается и изделие размещается между неподвижной 14 и подвижной 24 губками. Дальнейшее перемещение вызывает стопоре- ние механизма посредством клина 17 и сухарей. 1 з.п, ф-лы, 4 ил. i (Л с 0 / / I р, 7В 15 гз 00 о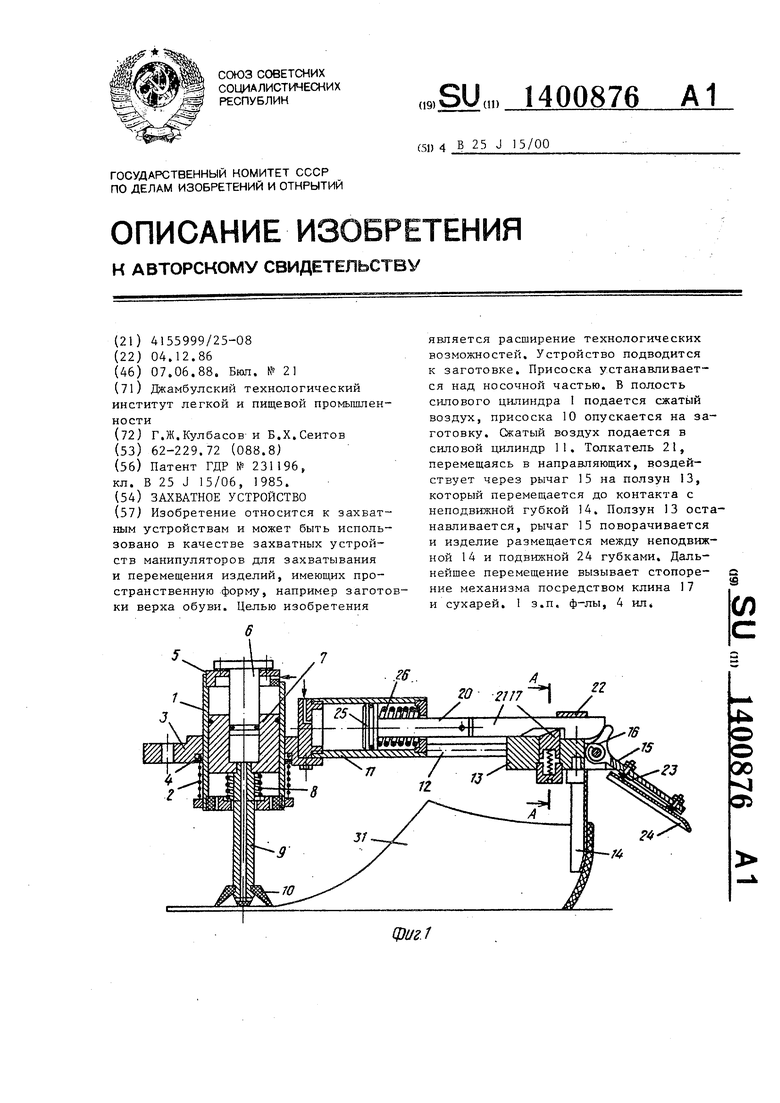
fd 1217 18 Фиг.
15
| УСТРОЙСТВО ДЛЯ ВВЕДЕНИЯ ЖИДКИХ СМЕСЕЙ В АНАЛИТИЧЕСКИЙ МАСС-СПЕКТРОМЕТР | 0 |
|
SU231196A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
