1
Изобретение относится к области промышленного транспорта, а именно к конвейерам для транспортирования штучных грузов.
Известны шаговые конвейеры для штучных грузов, содержаш,ие неподвижную раму с направляюшей с перемеш,ающейся по пей возвратно-поступательно штангой, снабженной толкающими и холостыми кулачками, соединенными между собой тягами.
Однако такие конвейеры могут применяться для транспортирования штучных грузов с преимушественно плоской опорной поверхностью.
Цель изобретения-обеспечение транспортирования грузов с неплоской опорной поверхностью.
Достигается это тем, что каждый холостой кулачок штанги выполнен в виде шарнирного параллелограмма, состояш,его из контактируюш,ей с грузом клавиши и двух шарнирносвязанных с ней рычагов, один из которых соединен тягой с соответствуюш,им толкающим кулачком, а другой - подпружинен.
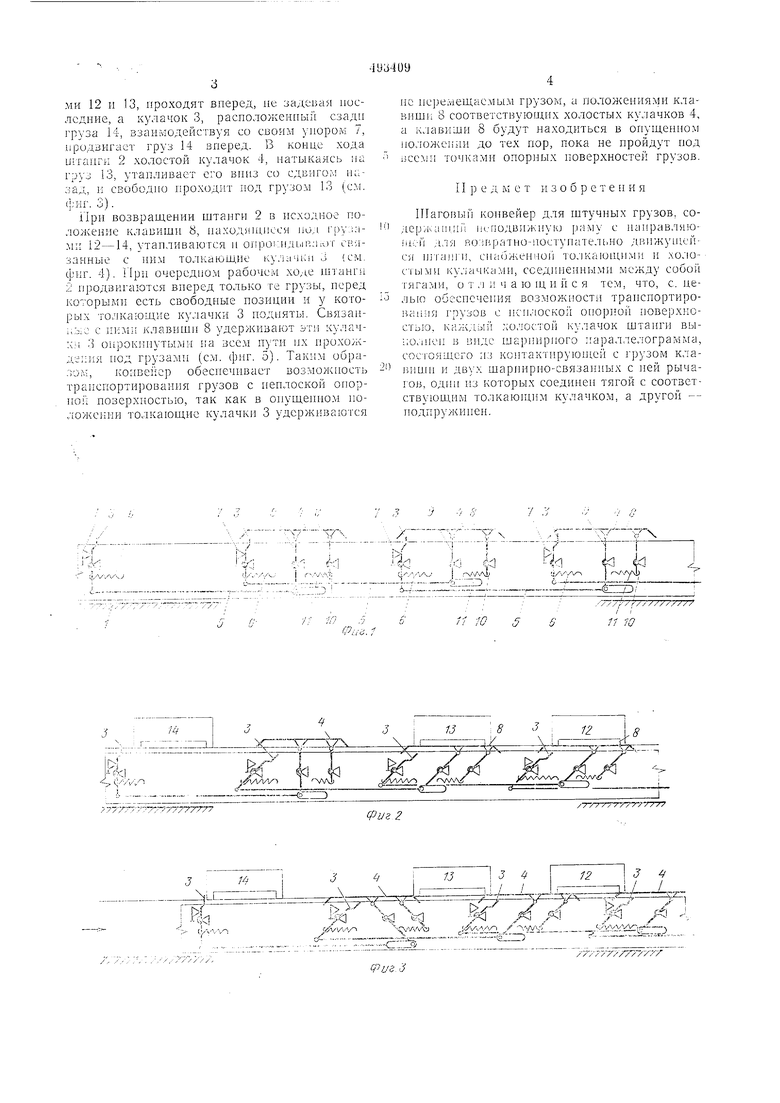
На фиг. 1 изображена принципиальная схема предложенного конвейера; на фиг. 2-5- конвейер в работе.
Шаговый конвейер, содержащий неподвижную раму 1 с направляющей для перемещающейся по ней возвратно-поступательно штанги 2, снабженной толкающими 3 и холостыми 4
кулачками, соединенными между собой тягами 5. Каждый толкающий кулачок 3 с одной стороны имеет пружину 6, а с другой - взанмодействзет с упором 7. Каждьп холостой кулачок 4 состоит из контактирующей с грузом клавиши 8 и шарнирно-связанпых с ней рычагов 9 и 10. Рычаг 9 соединен тягой 5 с соответствующим толкающим кулачком 3, а рычаг 10 - с пружиной 11. Пружины 6 толкающих кулачков 3 выполнены более мощпыми нежели пружины 11 холостых кулачков 4.
Работа конвейера осуществляется следующим образом.
При рабочем ходе и возврате штанга 2 движется по направляющей рамы 1.
В положенпп, когда грузы 12 и 13 находятся пад холостымп кулачками 4, клавиши 8 этих кулачков утоплены и сдвинуты вперед. Рычагами 9 п тягами 5 этпх холостых кулачков будут опрокинуты вниз и вперед также соответствующие толкающие кулачки 3. Клавиша 8, расположенная .между грузами 13 и 14, в начале рабочего хода под действпем пружины 11 находится в поднятом пололчеиии, и связанный с ней соответствующей тятой 5 задний толкающий кулачок 3 под действпем пружины 6 находится также в поднятом положении. При движении штамги 2 вперед (рабочий ход) толкающие кулачки 3 п холостые кулачки 4, расположенные под грузами 12 п 13, проходят вперед, пе задеиая последние, а кулачок 3, расположенпый сзадп груза 14, ззаимодействуя со своим упором 7, иродзигает груз 14 вперед. В копце хода пггапги 2 холостой кулачок 4, патыкаясь па груз 13, утапливает его впиз со сдвпгом и;зад, к свободно проходит под грузом 13 (см. (|;И1. 3).
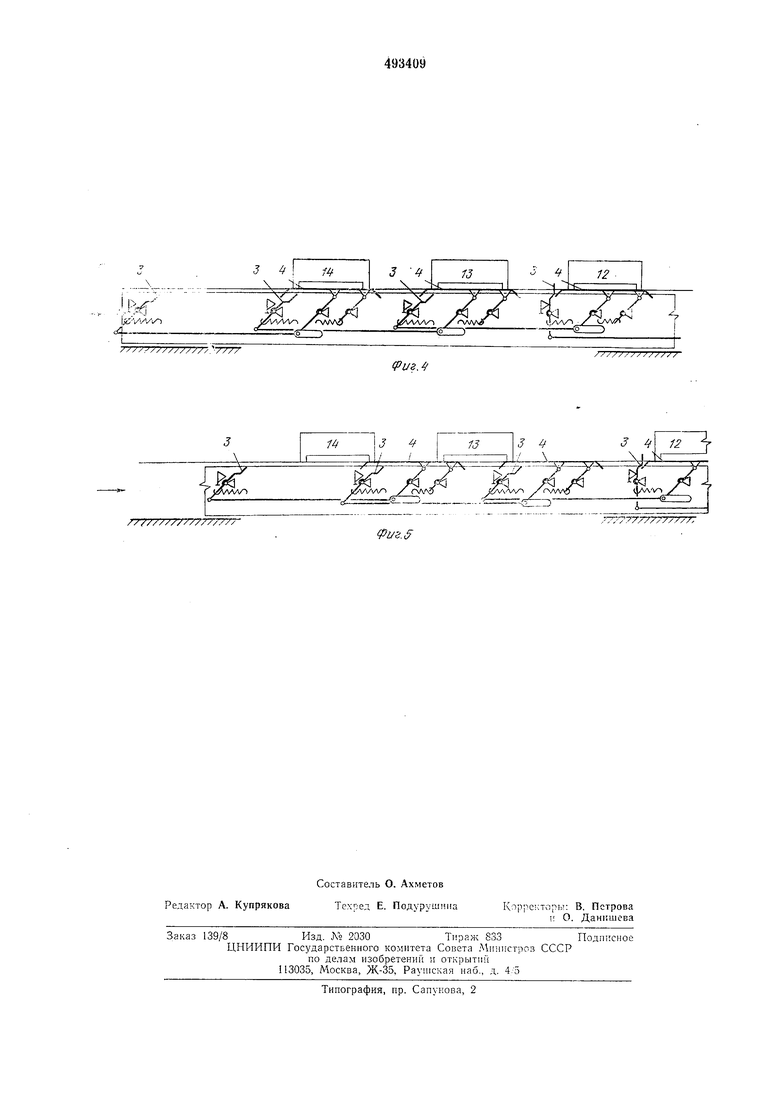
При возвращении штанги 2 в исходное положение клавиши 8, паходяп1псся пол i)y ;;iми 12-14, утапливаются п опрогпдыи:ьот связанные с ним толкаюш.не Ky.uiMhn 3 (см. сЬиг. 4). 1рн очередном рабочем ход.е нпангп 2 продвигаются вперед только те грузы, перед которыми есть свободные познции и у которых толкающие кулачки 3 подняты. Связаи:,ь.о с клавнщи 8 удерживают этн кулач:-ji 3 оирокпнутыми на всем иути нх прохождсппя под грузами (елп фиг. 5). Таким образок:, KOHBciiep обеспечнвает возможность трапепортнроваиия грузов с ненлоской онорпоГ; поверхностью, так как в опущепиом по.тожекин толкающие кулачкн 3 удерживаются
ис не)емещаемым грузом, а положенияЛП клавиши 8 соответствуюп нх холостых кулачков 4, а к:1ави1пн 8 будут находиться в оиущенном положении до тех нор, пока не пройдут под всеми точками опорных поверхностей грузов.
11 з е д к е т и з о б р е т е н и я
Шаговый конвейер для штучных грузов, содержаши псподвижиую раму с иаправляюiii.vu ;1ля возвратно-поступательно движущейся нлаигп, cnaij/fieHHOii 1о:1каю1цнм 1 и холостыми кулачками, сседииепиымн между собой тягами, о т л ; ч а ю щ и и с я тем, что, с. пелью обеспечепия возможности транспортировапля грузов с иснлоско; онориой новерхкостью, ка}кдьп xo.iocToii кулачок штаигн выпоанеп в вндс щар1Н1рного параллелограмма, сослоящего из коитактируюн1,е11 е грузом клаВ1ННИ и двух шарннрно-связанпых с ней рычагов, один из которых соединен тягой с еоответствующнм толкаюи1, кулачком, а другой - подиружииен.
| название | год | авторы | номер документа |
|---|---|---|---|
| Шаговый конвейер для транспортирования и накопления штучных грузов | 1972 |
|
SU437671A1 |
| ШАГОВЫЙ КОНВЕЙЕР | 1965 |
|
SU170385A1 |
| ШАГОВЫЙ КОНВЕЙЕР ДЛЯ ТРАНСПОРТИРОВАНИЯ ШТУЧНЫХ ГРУЗОВ | 1967 |
|
SU201220A1 |
| Шаговый конвейер-накопитель | 1983 |
|
SU1113329A1 |
| Шаговый конвейер-накопитель | 1985 |
|
SU1240694A1 |
| Шаговый конвейер | 1980 |
|
SU908690A1 |
| Штанговый конвейер | 1980 |
|
SU908693A1 |
| Шаговый конвейер | 1979 |
|
SU839903A1 |
| ШАГОВЫЙ ТОЛКАЮЩИЙ КОНВЕЙЕР | 1969 |
|
SU241286A1 |
| ШАГОВЫЙ КОНВЕЙЕР | 1994 |
|
RU2078727C1 |
J.l
fe
4
r
.VW
J 4 Л
г-™--..-7
i /g
флл.У-
v/v/ /г%ллл5
,,,7777777777777
