(54) ШАГОВЫЙ КОНВЕЙЕР
1
Изобретение относится к промышленному транспорту, в частности, к шаговым конвейерам, и предназначено для транспортирования с пустотелых предметов, например поддонов термических печей, с забором их с подающего оборудования и передачей на последующее принимающее оборудование.
Известен конвейер, содержащий горизонтальную траверсу с направляющими, в которых расположена щтанга с толкающими кулачками, связанная с приводом возвратно-поступательного движения, установленные шарнирно на направляющих собачки контроля наличия предметов на второй и последующих позициях и поворотный копир подъема куллчка в рабочее положение, который через тягу и рычаг с контргрузом шарнирно соединен с управляющим плечом блокирующей собачки, причем длина штанги с толкающими кулачками и направляющих обеспечивает только транспортирование с накоплением предметов на всех позициях и их выдачу на приемную площадку последующего оборудования в автоматическом режиме 1.
Так как длина щтанги с толкающими кулачками и направляющих обеспечивает
только транспортирование с накоплением предметов на всех позициях конвейера и их выдачу на приемную площадку принимающего оборудования, автоматический захват предмета с подающего оборудования при независимой работе шагового конвейера и подающего оборудования не решен. .Такое конструктивное выполнение конвейера ограничивает его технологические возможности.
Наиболее близким к предлагаемому является шаговый конвейер, содержащий щтангу, направляющие, в которых расположена каретка с толкающими кулачками и захватом, и привод возвратно-поступательного движения каретки, связанный со щтан15 гой 2.
Каретка конвейера имеет другую щтангу, обе штанги имеют ложементы, при помощи которых осуществляется передача предмета от транспортирующего устройства на пер2Q вую позицию конвейера. При этог. отсутствует блокировка занятости первой позиции по ходу конвейера.
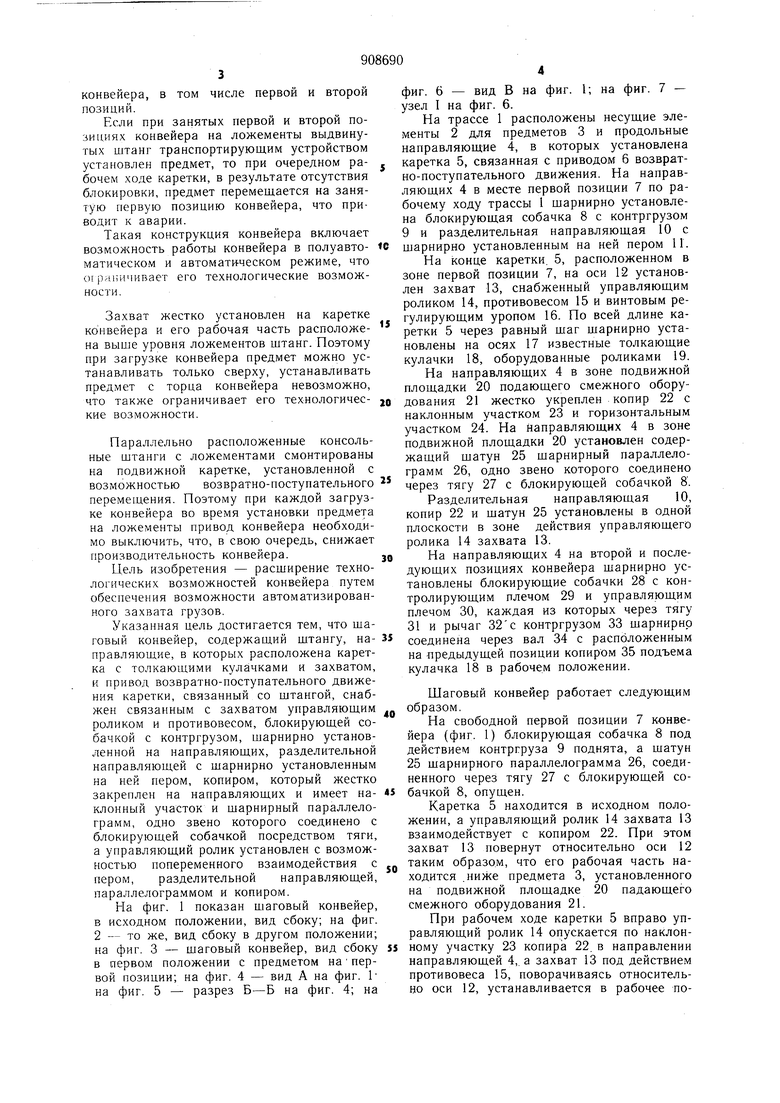
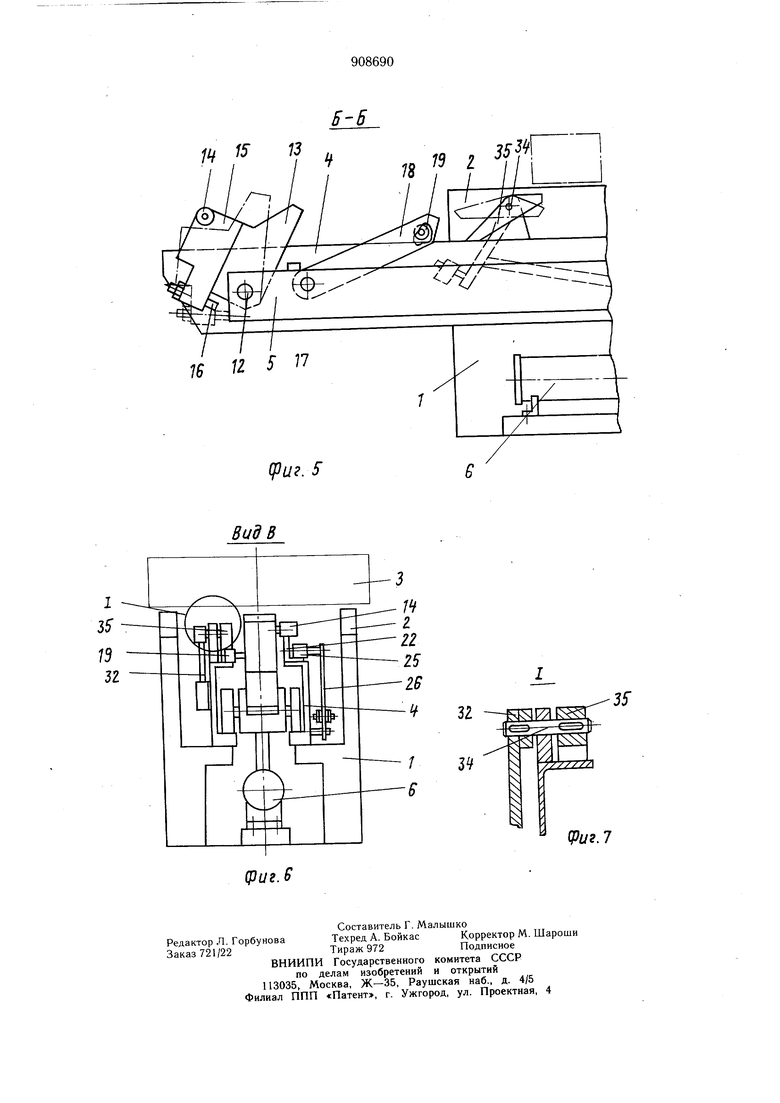
В случае перемещения выдачи предметов с конвейера на прижимающее оборудование происходит заполнение всех позиций конвейера, в том числе первой и второй позиций. Если при занятых первой и второй позициях конвейера на ложементы выдвинутых штанг транспортирующим устройством установлен предмет, то при очередном рабочем ходе каретки, в результате отсутствия блокировки, предмет перемещается на занятую первую позицию конвейера, что приводит к аварии. Такая конструкция конвейера включает возможность работы конвейера в полуавтоматическом и автоматическом режиме, что 01 ра1;ичивает его технологические возможности. Захват жестко установлен на каретке конвейера и его рабочая часть расположена выше уровня ложементов штанг. Поэтому при загрузке конвейера предмет можно устанавливать только сверху, устанавливать предмет с торца конвейера невозможно, что также ограничивает его технологические возможности. Параллельно расположенные консольные штанги с ложементами смонтированы на подвижной каретке, установленной с возможностью возвратно-поступательного перемещения. Поэтому при каждой загрузке конвейера во время установки предмета на ложементы привод конвейера необходимо выключить, что, в свою очередь, снижает производительность конвейера. Цель изобретения - расширение технологических возможностей конвейера путем обеспечения возможности автоматизированного захвата грузов. Указанная цель достигается тем, что шаговый конвейер, содержащий щтангу, направляющие, в которых расположена каретка с толкающими кулачками и захватом, и привод возвратно-поступательного движения каретки, связанный со штангой, снабжен связанным с захватом управляющим роликом и противовесом, блокирующей собачкой с контргрузом, шарнирно установленной на направляющих, разделительной направляющей с шарнирно установленным на ней пером, копиром, который жестко закреплен на направляющих и имеет наклонный участок и шарнирный параллелозвено которого соединено с грамм, одно блокирующей собачкой посредством тяги, а управляющий ролик установлен с возможностью попеременного взаимодействия с пером, разделительной направляющей, параллелограммом и копиром. На фиг. 1 показан шаговый конвейер, в исходном положении, вид сбоку; на фиг. 2 - то же, вид сбоку в другом положении; на фиг. 3 - щаговый конвейер, вид сбоку в первом положении с предметом напервой позиции; на фиг. 4 - вид А на фиг. 1на фиг. 5 - разрез Б-Б на фиг. 4; на фиг. 6 - вид в на фиг. 1; на фиг. 7 - узел I на фиг. 6. На трассе 1 расположены несущие элементы 2 для предметов 3 и продольные направляющие 4, в которых установлена каретка 5, связанная с приводом 6 возвратно-поступательного движения. На направляющих 4 в месте первой позиции 7 по рабочему ходу трассы 1 щарнирно установлена блокирующая собачка 8 с контргрузом 9 и разделительная направляющая 10 с щарнирно установленным на ней пером 11. На конце каретки. 5, расположенном в зоне первой позиции 7, на оси 12 установлен захват 13, снабженный управляющим роликом 14, противовесом 15 и винтовым регулирующим уропом 16. По всей длине каретки 5 через равный щаг шарнирно установлены на осях 17 известные толкающие кулачки 18, оборудованные роликами 19. На направляющих 4 в зоне подвижной площадки 20 подающего смежного оборудования 21 жестко укреплен копир 22 с наклонным участком 23 и горизонтальным участком 24. На направляющих 4 в зоне подвижной площадки 20 установлен содержащий щатун 25 щарнирный параллелограмм 26, одно звено которого соединено через тягу 27 с блокирующей собачкой 8. Разделительная направляющая 10, копир 22 и шатун 25 установлены в одной плоскости в зоне действия управляющего ролика 14 захвата 13. На направляющих 4 на второй и последующих позициях конвейера шарнирно установлены блокирующие собачки 28 с контролирующим плечом 29 и управляющим плечом 30, каждая из которых через тягу 31 и рычаг 32с контргрузом 33 шарнирно соединена через вал 34 с расположенным на предыдущей позиции копиром 35 подъема кулачка 18 в рабочем положении. Шаговый конвейер работает следующим образом. На свободной первой позиции 7 конвейера (фиг. 1) блокирующая собачка 8 под действием контргруза 9 поднята, а шатун 25 шарнирного параллелограмма 26, соединенного через тягу 27 с блокирующей собачкой 8, опущен, Каретка 5 находится в исходном положении, а управляющий ролик 14 захвата 13 взаимодействует с копиром 22. При этом захват 13 повернут относительно оси 12 таким образом, что его рабочая часть находится .ниже предмета 3, установленного на подвижной площадке 20 падающего смежного оборудования 21. При рабочем ходе каретки 5 вправо управляющий ролик 14 опускается по наклонному участку 23 копира 22. в направлении направляющей 4,. а захват 13 под действием противовеса 15, поворачиваясь относительно оси 12, устанавливается в рабочее положение. При этом рабочая поверхность упора 16 упирается в торец штанги 5, предотвращая дальнейший поворот захвата 13 относительно оси 12, а управляюш:ий ролик 14 устанавливается относительно направляющей 4 с зазором t (фиг. 2). При дальнейшем движении каретки 5 вправо управляющий ролик 14 проходит под разделительной направляющей 10 и по ходу захватывает за внутреннюю поверхность стенки пустотелый предмет 3, установленный на площадке 20 подающего смежного оборудования 21. Причем усилие на захват 13, возникающее при транспортировке предмета 3, передается через упор 16 на торец каретки 5. Захват 13 транспортирует предмет 3 на первую позицию 7 конвейера, а его управляющий ролик 14 по ходу отклоняет перо 11. На занятой первой позиции 7 конвейера блокирующая собачка 8 под действием веса предмета 3 опущена, а шатун 26 шарнирного параллелограмма 26, соединенного через тягу 27 с собачкой 8, поднят. Причем рабочая поверхность щатуна 25 устанавливается на одном уровне с рабочей поверхностью разделительной направляющей 10. При холостом ходе каретки 5 влево управляющий ролик 14 захвата 13, взаимодействуя последовательно с пером 11 и разделительной направляющей 10, устанавливает захват 13 в нерабочее положение (фиг. 3). При дальнейшем движении каретки 5 влево ролик 14 переходит с разделительной направляющей 10 на рабочую поверхность щатуна 25. Так как рабочие поверхности щатуна 25 и разделительной наоравляющей 10 находятся на одном уровне, то при движении каретки 5 влево до ее конечного исходного положения захват 13 остается в нерабочем положении. Если на первой позиции 7 конвейера находится предмет 3, то при очередном рабочем ходе каретки 5 вправо управляющий ролик 14, последовательно взаимодействуя с рабочими поверхностями щатуна 25 и разделительной направляющей 10, переходит на перо 11 и опускается в направлеНИИ направляющей 4. При этом захват 13 разворачивается в рабочее положение только в пределах первой позиции 7 в конце хода каретки 5. Поэтому если при подаче подвижной площадкой 20 очередного предмета 3 оказывается, что первая позиция 7 конвейера занята, то при очередном рабочем ходе каретки 5 не происходит взаимодействия захвата 13 с предметом, установленным на площадке 20. Дальнейщая транспортировка предмета с первой позиции 7 конвейера на вторую происходит следующим образом. Если вторая позиция свободна, то контролирующее плечо 29 известной блокирующей собачки 28 приподнято (фиг. 3), копир 35 подъема кулачка 18, расположенный на первой позиции и щарнирно связанный с управляющим плечом 30 собачки 28 через тягу 31, рычаг 32 с контргрузом 33 и вал 34, опущен в зону перемещения ролика 19 толкающего кулачка 18. При очередном рабочем ходе каретки 5 вправо ролик 19, перемещаясь по направляющим 4, по ходу вступает во взаимодействие с копиром 35. При этом толкающий кулачок 18 разворачивается относительно оси 17 и устанавливается в рабочее положение, показанное пунктиром на фиг. 3. При дальнейщем движении каретки 5 толкающий кулачок 18 вступает во взаимодействие с боковой поверхностью предмета 3 и переталкивает его на вторую позицию. Таким образок, предлагаемая конструкция шагового конвейера исключает аварийные ситуации при автоматическом захвате предмета с подающего смежного оборудования и транспортировке его на первую позицию, что, при независимой работе шагового конвейера и подающего оборудования, позволяет автоматизировать работу конвейера и расширяет его технологические возможности. При входе, каретки в зону смежного оборудования рабочие поверхности шарнирно установленного на ней захвата проходят ниже уровня расположения предмета, что позволяет загружать конвейер во время работы и тем самым повышает его производительность. Конструкция захвата предотвращает нагружение управляющего ролика, что позволяет упростить конструкцию ролика и уменьщить его габариты. Это дает возможность, в свою очередь, выполнить компактными все элементы, с которыми взаимодействует ролик, расположенные в зоне подающего оборудования. Формула изобретения Шаговый конвейер, содержащий щтангу, направляющие, в которых расположена каретка с толкающими кулачками и захватом, и привод возвратно-поступательного движения каретки, связанный со штангой, отличающийся тем, что, с целью расширения технологических возможностей путем обеспечения возможности автоматизированного захвата грузов, конвейер снабжен связанным с захватом управляющим роликом и противовесом, блокирующей собачкой с контргрузом, шарнирно установленной на направляющих, разделительной направляющей с шарнирно установленным на ней пером, копиром, который жестко закреплен на направляющих и имеет наклонный участок и шарнирный параллелограмм, одно звено которого соединено с блокирующей собачкой посредством тяги, а управляющий ро„1ик установлен с йозможностью попеременного взаимодействия с пером, разделительной направляющей, параллелограммом и копиром. № № то Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР 2818139/27-03, кл. В 65 G 25/08, 1979. 2.Авторское свидетельство СССР 2684771/27-03, В 65 G 25/08, 1978 (проип). / ft{/ n 15 /3 10 9 3 4 гВ 27 77 П
(PU2.3 3S23 7 11


| название | год | авторы | номер документа |
|---|---|---|---|
| Шаговый конвейер | 1979 |
|
SU839903A1 |
| Шаговый конвейер-накопитель | 1978 |
|
SU747778A1 |
| Шаговый конвейер | 1978 |
|
SU781136A1 |
| Шаговый конвейер-накопитель | 1985 |
|
SU1313774A1 |
| Шаговый конвейер-накопитель | 1984 |
|
SU1266809A1 |
| Карусельная формовочная установка | 1982 |
|
SU1106658A1 |
| АВТОМАТИЧЕСКАЯ ЛИНИЯ ДЛЯ ОБРАБОТКИ ПРУЖИН | 1969 |
|
SU249276A1 |
| Шаговый конвейер | 1982 |
|
SU1025612A1 |
| Шаговый конвейер | 1978 |
|
SU749757A1 |
| Шаговый конвейер | 1982 |
|
SU1008107A1 |

Вид А
33
25 14 26 11
I/
/ / I
П
10 5
иг.Ч
J5- 2.
