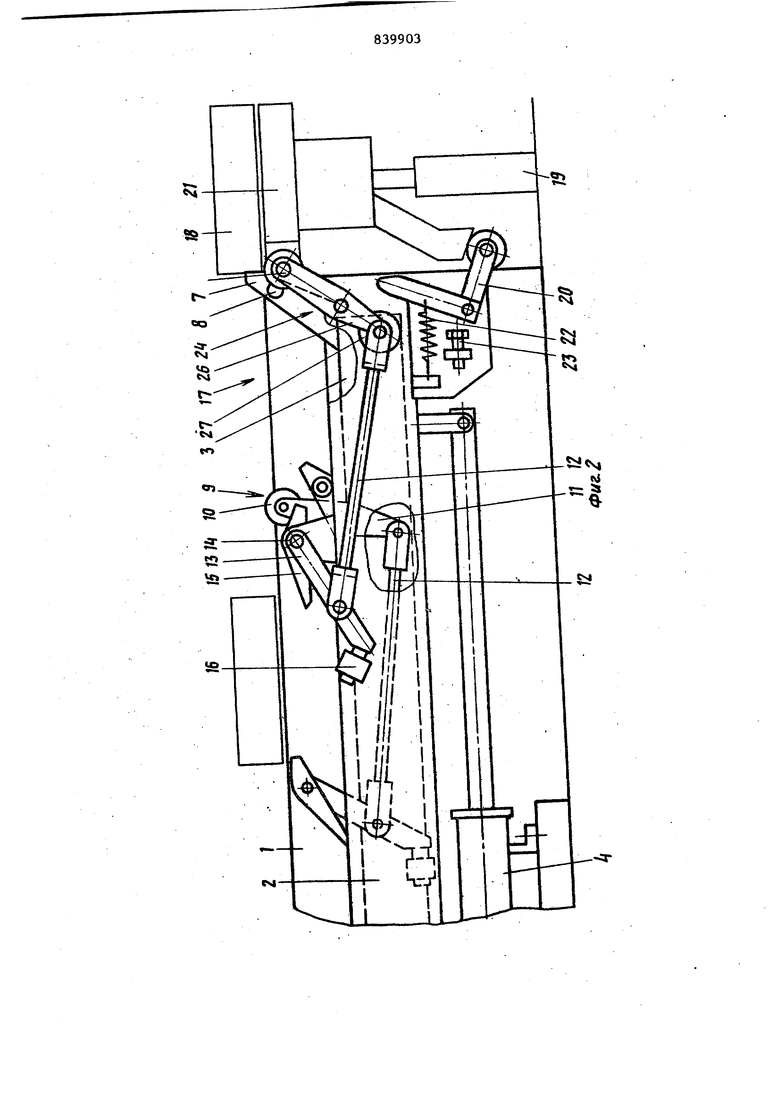
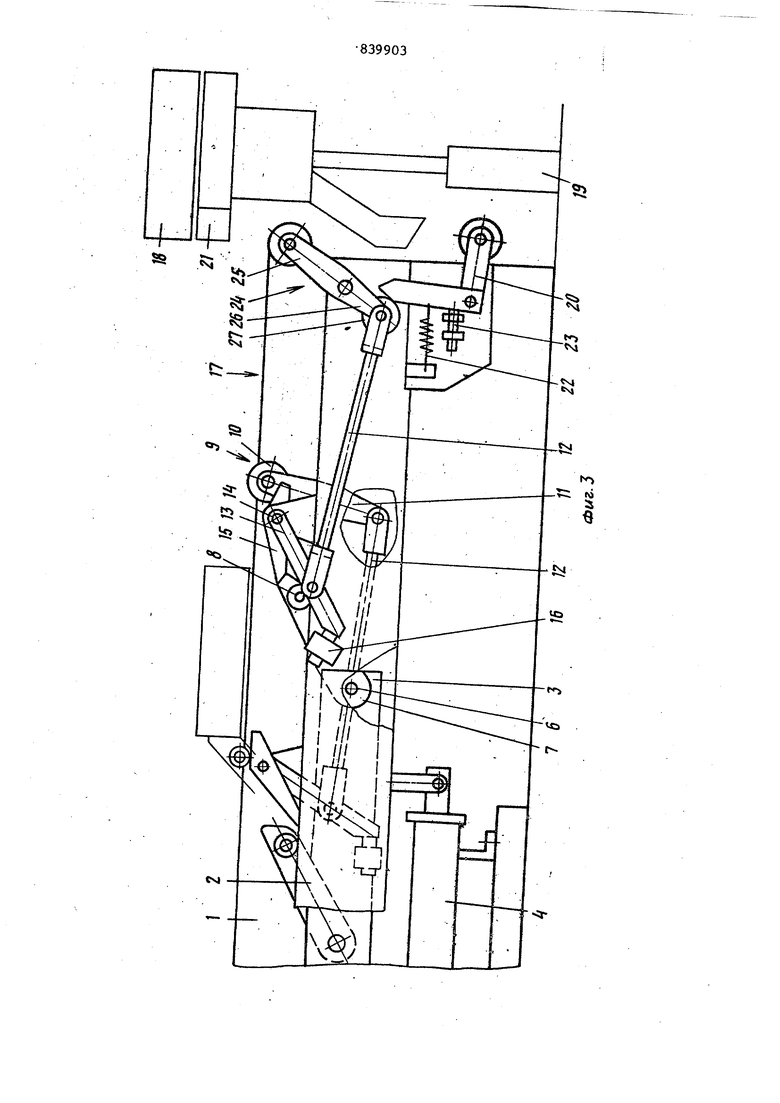
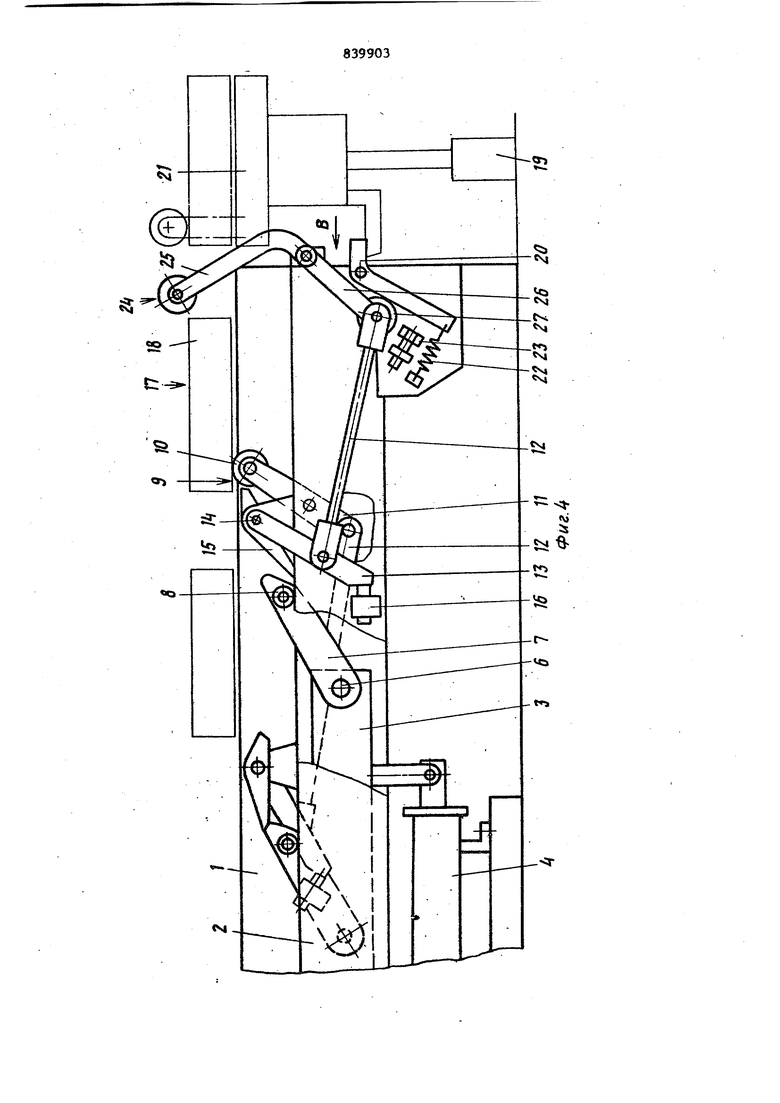
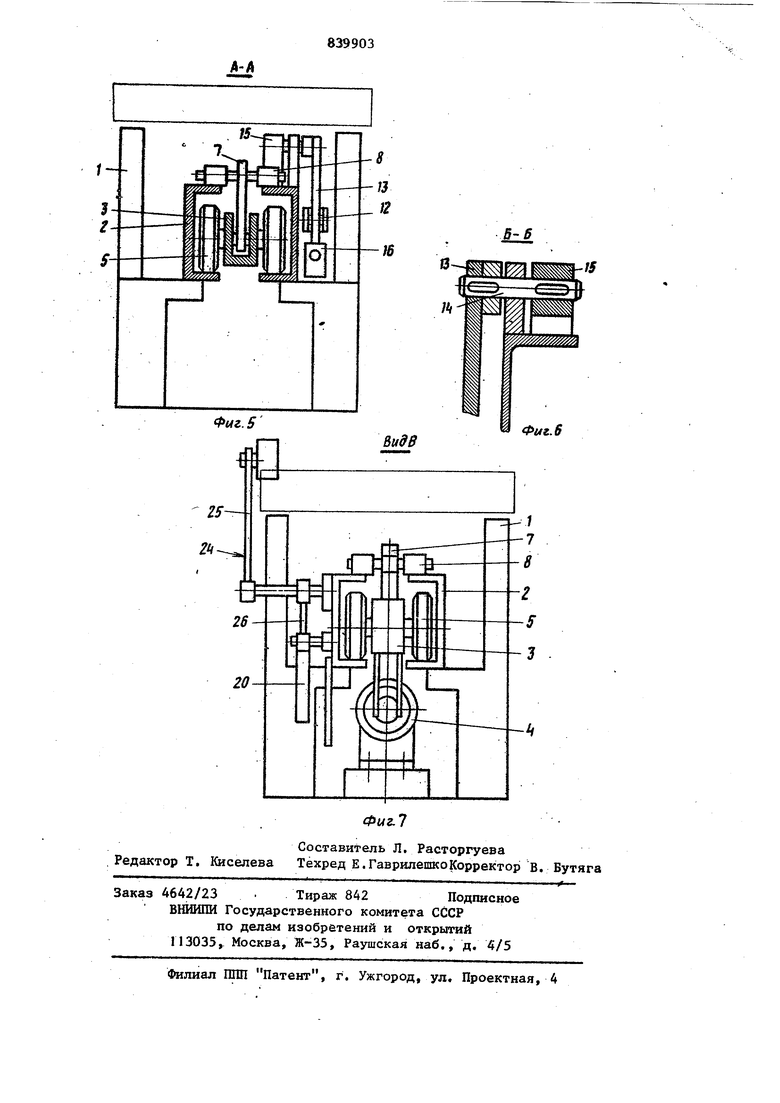
Изобретение относится к промыш ленному транспорту, в частности, к шаговым конвейерам, и предназначено для транспортирования с накоплением перемещаемых предметов на горизонтальной трассе и передачи их на принимающее оборудование. Известен шаговый накопитель загрузчик , содержащий направляющие с перемещающимися по иим кареткам накопления, несущими на себе систему подпружиненных толкающих и блокирующих кулачков, соединенных между собо попарно гибкой связью, и дополнитель ные каретки загрузки, расположенные параллельно кареткам накопления l. . Недостатком указанного накопителя-загрузчика является наличие в кем двух типов кареток: кареток-накопления и кареток-загрузки, что значител но усложняет конструкцию накопителя загрузчика в .целом и увеличивает его габарит по ширине. Кроме того, наличие блокировки рабочего кулачка на конечной позиции в виде датчика и тянущего электромагнита усложняет электрическую схему шагового накопителя, в результате чего снижается надежность его работы. Наиболее близким к предполагаемому по технической сущности является шаговый конвейер, содержащий горизонтальную трассу с направляю1чими, расположенную в направляющих штангу с толкающими кулачками, закрепленные шарнцрно на направляющих собачки контроля наличия предметов, каждая из которых имеет контролирующее и управляющее плечи, поворотный упор контроля наличия приемной площадки и привод возвратно-поступательного перемещения штанги f2. Указанный шаговый к(энвейер имеет следующие недостатки: 1. Так как работа данного конвейера и последюуще1о оборудования происхо дит в независимом ритме, периодический вход штанги в зону принимающего оборудррания создает опасность возникновения аварийных ситуаций. Это исключает возможность работы конвей в полуавтоматическом и автоматическом режиме и, следовательно, ограни ,чивает его технологические возможно ти. . 2.Трасса конвейера снабжена под вижным упором для взаимодействия с площадкой с жестким упором, которая установлена с возможностью вертикального перемещения и взаимодействия ее упора с подвижным упором. Н такая конструкция конв,ейера не обеспечивает контроля наличия транс портируемых предметов на подвижной площадке, когда она находится в вер нем положении, на одном уровне с тр сой конвейера. Поэтому при наличии предметов и на подвижной площадке и на последней позиции конвейер необх димо выключить, пока площадка не опустится до своего нижнего положения. В противном случае кулачок штанги, установленный на последней позиции конвейера, перетолкнет пред мет на занятую площадку, а это приведет к аварии. Выключение конвейера после каждой загрузки площадки приводит к снижению его производительности. Кроме того, такая конструкция позиции передачи конвейера (отсутствие контроля наличия предме на площадке и нёобход: имость визуаль ного наблюдения) также не позволяет осуществить работу конвейера в полуавтоматическом и автоматическом режиме. 3.Подвижный упор, установленный на трассе конвейера, для взаимодействия с кулачком штанги (через толкатель и упор) обеспечивает передач предметов только вниз, на уровень, расположенный ниже, чем трасса конвейера. Все это снижает его тёхнологичес кие возможности, исключая возможность передачи предь етов на уровень выше трассы конвейера Цель изобретения - повышение производителности конвейера и pacaaw рение технологических возможностей Поставленная цель достигается тем, что конвейер снабжен шарнирно установленньвш на направляющей дополнительной собачкой, контролирующее плечо которой расположено в зоне приемной площадки, и поворотными копирами подьема кулачков в рабочее положение, каждый из которых соединен с управляющим плечом собачки посредством вала, рычага с контргрузом и тяги и установлен с возможностью взаимодействия с толкающим кулачком при отсутствии предмета на последующей позиции, при этом поаор|Отный упор подпружинен и установлен, с возможностью противодействия контргрузу через управляющее плечо додолнительной собачки при отсутствии приемной площадки. На фиг.i изображен шаговый конвейер в исходном положении, вид сбоку; на фиг.2 и 3 - два последовательных положения элементов шагового конвейера; на фиг.4 - вариант конструкции элементов шагового конвейера, передающего предмет на последующее оборудование для транспортирования на уровень, расположенный ниже трассы конвейера; на фиг.5 - разрез А-А на фиг.I; на фиг.6 - разрез Б-Б на фиг.1; на фиг.7 - вид Б на фиг.4. Шаговый конвейер содержит горизонтальную трассу 1 с направляющими 2, в которых расположена штанга 3, снабженная приводом возвратно-поступательного движения 4 и роликами 5. На штанге 3 через равный шаг установлены на осях 6 толкающие кулачки 7, оборудованные роликами 8. На направляющих 2 установлены шарнирно собачки 9 с контролирующим плечом 10 и управляющим плечом 11, которое через тягу 12 соединено с рычагом 13, жестко установленным,на одном валу 14 с поворотным копиром 15 подьема кулачка в рабочее положение. На рычаге 13 закреплен контргруз 16. На позиции передачи 17 предмета 18на принимающее оборудование 19установлен поворотный упор 20 контроля наличия приемнойплощадки 21принимающего оборудоваиня 19. Поворотный упор 20 снабжен пружиной 22и регулируемым упором 23, На позиции передачи I7 на направляющих 2 установлена шарнирно дополнительная двухплечая блокирующая собачка 24, с контролируннцим плечом 25 и управляющим плечом 26. Управляющее плечо 26 дополнительной собачки 24 шарнирно соединено через тягу 12, рычаг 13 и вал 14 с поворотным копиром 15,
установленными на позиции передачи 17, на которой в месте шарнирного соединения тяга 12 и управляющего плеча 26 установлен ролик 27.
Шаговый конвейер работает следующим образом.
При включении привода 4 вместе со штангой 3 перемещаются толкающие кулачки 7 с роликами 8, а ролики 5 штанги 3 перемещаются по направляющим 2.
На занятых транспортируемыми пред метами 18 позициях контролирующие плечи 10 собачек 9 прижаты этими предметами 18, а соединенные ними через тягу 12 и рычаг 13 поворотные копиры 15 - подняты. На свободных позициях контролирующие плечи 10 собачек 9 - подняты, а соединенные с ними копиры 15 - опущены.
При рабочем ходе штанги 3 вправо ролик 8 кулачка 7 встречает опущенны копир 15, если позиция, на которой установлена соединенная с ним собачка 9, свободна. При дальнейшем движении штанги ролик 8 взаимодействует с копиром 15, в результате чего кулачок 7 поворачивается относительно оси 6 и поднимается до уровня расположения транспортируемого предмета 18. Поднятые кулачки 7 захватывают предметы 18 и перемещают их на шаг.
Если позиция, на которой установлена собачка 9, занята, тогда при движении штанги 3 ролик 8 соответствующего этой позиции кулачка 7 встречает поднятый копир 15. При дальнейшем движении штанги 3 ролик 8 проходит под копиром 15 и кулачок 7 проходит нижеуровня расположения предмета 18. Таким образом происходит накопление предметов 18 на трассе 1 конвейера и транспортирование их на позицию передачи 17. Если при этом приемная площадка 21 принимающего оборудования 19 поднят в верхнее положение {фиг.З), то поворотный уопр 20 под действием пружины 22, противодействуя контргрузу 16 через ролик 27, управляющее плечо 26, установленные на позиции пердачи 17, тягу 12, рычаг 13 и вал 1А поворачивает в верхнее роложение копир 15 позиции передачи 17. Поэтому при очередном рабочем ходе штанги 3 ролик 8 толкающего кулачка 7, -соответствующего позиции передачи 17 к. пройдет ниже уровня расположения предмета 18.
Поворот, упора 20 под действием пружины 22 ограничивается регулируемым упором 23.
JlfiK осуществления передачи предмета 18 с последней позиции конвейера
приемная площадка 21 принимающего оборудования 19 опускается в крайнее нижнее положение так, что ее опорная поверхность оказывается на одном уровне с трассой 1 (фиг. 1) , а площадка 21, воздействуя на упор 20, поворачивает его. При этом упор 20 освобождает управляющее плечо 26 дополнительной блокирующей собачки 24, в результате чего шарнирно соединенные с ним тяга 12 и рычаг 13 под действием контргруза 16 поворачиваются, опуская установленный на позиции передачи 17 копир 15 в зону перемещения ролика 8 кулачка 7. При . рабочем ходе штанги 3 вправо происходит взаимодействие ролика 8 с копиром 15, в результате чего установленный на торце штанги 3 кулачок 7 поворачивается относительно оси 6 и поднимается до уровня расположения предмета 18. Предмет 18, расположенный на позиции передачи 17 конвейера, переталкивается кулачком 7 на площадку 21 принимающего оборудования 19. При этом транспортируемым предметом 18 прижимается дополнительная блокирующая собачка 24, контролирующее плечо 25 которой расположено в зоне приемной площадки 21 принимающего оборудования 19.
Так как кулачок 7, соответствующий позиции передачи 17, установлен на конце штанги 3, последняя при рабочем ходе не вьщвигается вперед за пределы трассы 1 конвейера и не входит при этом в зону работы принимающего оборудования 19.
При ходе штанги 3 влево, в исходное положение, кулачок 7 выходит иа взаимодействия с предметом 18 и поворачивается лод действием собственного веса относительно оси 6, при этом ролик 8 опускается на направо ляющую2.При дальнейшем движении штанги 3 в исходное положение ролик 8 кулачка 7 двигаясь по направляющей 2, проходит под поднятым копиром 15 позицин передачи 17. Шаговый конвейер продолжает рабо даже при наличии предмета 18 на приемной площадке 21 принимающего оборудования 19 (-фиг. 2), так как дополнительйая блокирующая собачка 24, контролирующее плечо 25 которой расположено в зоне приемной пло щадки 21, прижата этим предметом. Следовательно, копир 15, соединенны с этой собачкой тягой 12, рычагом 1 ,и валом 14, поднят и при очередном ходе штанги 3 вправо ролик 8 толкающего кулачка 7 проходит под копиром 15, а кулачок 7 остается в опущенном положении и проходит ниже предмета, расположенного на позиции передачи 17. Приемная площадка 21 с установле ным на ней предметом 18 поднимается в верхнее положение (фиг.З) , освобождая поворотный упОр 20,. который под действием пружины 22 поворачивается до взаимодействия с регули руемым упором 23. При своем поворот упор 20, противодействуя контргрузу 16, через ролик 27, управляющее пле чо 26 собачки 24, тягу 12, рычаг 13 и вал 14 фиксирует в поднятом положении копир 13, установленный на п зиции передачи 17. Следовательно, конвейер может продолжать работу пр отсутствии приемной йлощадки 21 принимающего оборудования. При необходимости транспортирования предметов приемной площадкой 21 ниже уровня трассы конвейера, дополнительная блокирующая собачка и noBopotHbffit упор 20 выполняются, как показано на фиг.4 и 7. Предлагаемый шаговый конвейер снабжен дополнительной двухплечей блокирующей собачкой, контролирующее плечо которой расположено в зоне приемной площадки принимаюц го оборудования и поворотньм копиром подъема кулачка в рабочее положение которьй через вал, рычаг с контргру зом и тягу шарнирно соединен с управляющим плечом блокирующей собачки, что позволяет транспортировать и накапливать предметы на трассе даже при занятой приемной . площадке принимающего оборудования, когд она находится на одном уровне с трассой конвейера, т.е. повышает производительность конвейера. Толкающий кулачок, соответствующий последней позиции конвейера и обеспечивающий передачу предмета на приемную площадку принимающего оборудсВания, установлен на торце штанги (фиг.2). Поэтому штанга во время рабочего хода не входит в зону работы принимающего оборудования, что исключает возникновение аварийных ситуаций и тем самым позволяет автоматизировать работу конвейера, и,следовательно, повышает его производительность и расширяет технологические возможности. Варианты конструкции блокирующей собачки и поворотного упора позволяет обеспечить блокировку работы шагового конвейера при необходимости передачи предмета на принимающее оборудование с дальнейшим транспортированием .его на уровень выше или ниже уровня трассы, что расширяет технологические возможности шагового конвейера. Формула изобретения Шаговый конвейер, содержащий горизонтальную трассу с направляющими, расположенную в направляющих штангу с толкающими кулачками, закреш1ен1ше шарнирно на направляюощх собачки конт роля наличия предметов, каждая из которых имеет контролирующее и управляющее плечи, поворотный упор контроля наличия приемной площйдки и привод возвратно-поступательного перемещения штанги, отличающийс я тем, что, с целью повьштения производительности конвейера и расширения технологических возможностей, конвейер снабжен шарнирно установленными на направляющей дополнительной собачкой, контролирующее плечо которой расположено в зоне приемной площадки,и поворотными копирами подъема кулачков в рабочее положение, каждый из которых соединен с управляющим плечом собачки посредством вала, рычага с контргрузом и тяги и установлен с возможностью взаимодействия с толкающим кулачком при отсутствии предмета на последующей позиции,при этом поворотный упор подпружинен и установлен с возможностью противодействия контргрузу
983990310
через управляющее плечо дополнитель- 1 Авторское свидетельство СССР ной собачки при отсутствии приемной 492436, кл. В 65 G 25/08, 1972. шошэдки.2. Авторское свидетельство СССР
Источники информации, 554190, кл. В 65 G 25/08, 1975
приммтые во внимание при экспертизе (прототип).
«м
Сч4
см
r


| название | год | авторы | номер документа |
|---|---|---|---|
| Шаговый конвейер | 1980 |
|
SU908690A1 |
| Шаговый конвейер-накопитель | 1985 |
|
SU1313774A1 |
| Кантователь | 1976 |
|
SU599873A2 |
| МАШИНА ДЛЯ ОБЕРТКИ И УКЛАДКИ ПЛОДОВ В ЯЩИКИ | 1954 |
|
SU110120A1 |
| Автоматическая линия для изготовления арматурных каркасов | 1984 |
|
SU1337176A1 |
| Кантователь | 1973 |
|
SU510285A1 |
| Сборочная линия | 1985 |
|
SU1255352A1 |
| Роторно-конвейерная линия | 1983 |
|
SU1135608A1 |
| Шаговый конвейер-накопитель | 1983 |
|
SU1113329A1 |
| Карусельная формовочная установка | 1982 |
|
SU1106658A1 |