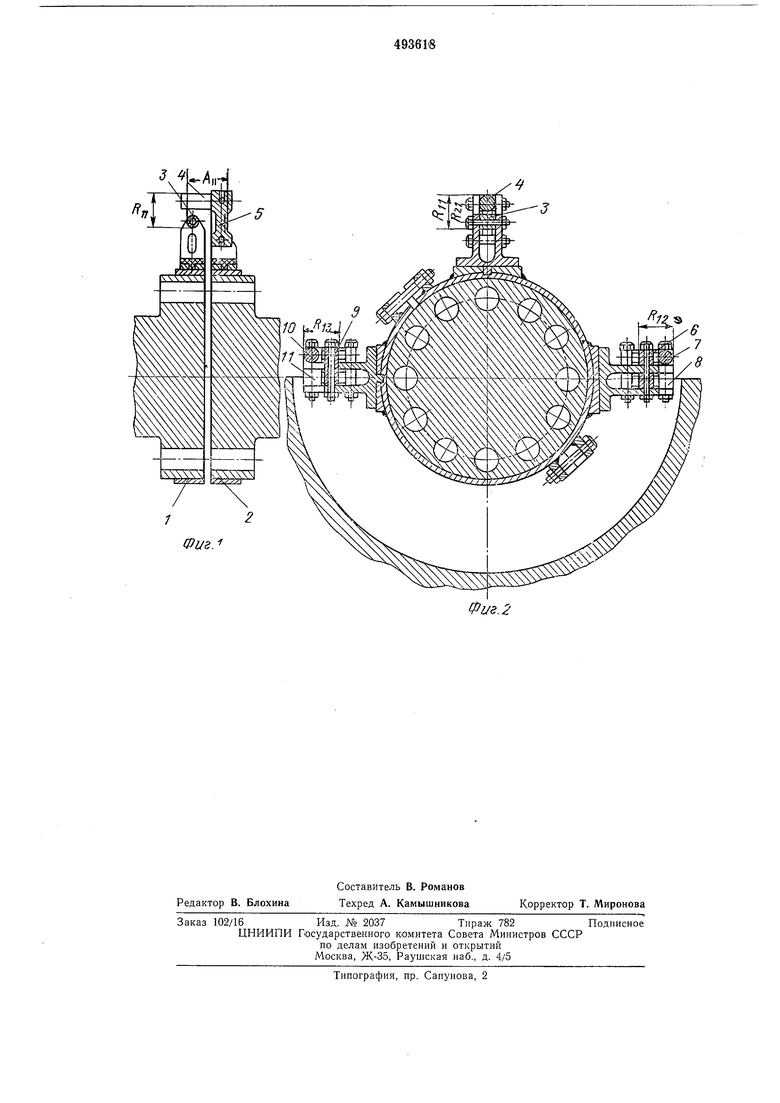
мерения зоне (см. фиг. 2). Затем с помощью измерителя линейных перемещений, например микрометра, измеряют последовательно расстояния между измерительными поверхностями 3 и 4; 6 и 7; 9 и 10. Полученные результаты Rii, Riz и R,3 позволяют характеризовать взаимное положение роторов в радиальном направлении. Для нахождения углового взаимного расположения роторов (излома осей) измеряют расстояния между измерительными поверхностями 3 и 5; 6 и 8; 9 и II и находят величины Л и; Aiz и Л is.
Полученные результаты не свободны от ошибки, вызванной неточностью изготовления приспособления и неточностью его установки на выходные концы валов. Для устранения этих погрещностей выполняют вторую серию измерений при одном пространственном положении измерителя, например, вверху. Первое измерение (величина Ru и Лц) можно не повторять, если за точку пространственного измерения выбирают исходное положение измерительных поверхностей 3, 4 и 5.
Затем роторы синхронно поворачивают так, чтобы измерительные поверхности б, 7 и 8 оказались в выбранном для второй серии измерений пространственном положении и измеряют расстояния и Л22- Затем в эту же точку приводят поверхности 9, 10 и 11 и измеряют расстояния Rzs и Лгз. Поскольку положение осей вращения роторов при этих поворотах можно считать неизменными, разность результатов измерения при одном и том же пространственном положении измерителя характеризует ошибку изготовления приспособления и погрешность его установки на выходных концах сопрягаемых валов.
Разности величин, полученных в первой и второй сериях измерения, может считать свободными от ошибок изготовления и установки приспособления. О величине несоосности судят по разностям
Ли-Л 21 О
0
Л12-Л22 ДЛ2 Л13-Л23 АЛз
Предмет изобретения
Способ измерения несоосности роторов двух сопрягаемых машин с помощью устанавливаемого на выходные концы валов приспособления с измерительными поверхностями, заключающийся в том, что при неподвижных роторах измеряют расстояния между измерительными поверхностями приспособления не менее чем в трех точках и определяют величины, характеризующие взаимное расположение роторов, отличающийся тем, что, с целью повышения точности, роторы сопрягаемых машин синхронно поворачивают, повторно измеряют расстояния между измерительными поверхностями приспособления при одном пространственном положении измерителя и по результатам второй серии измерений вносят поправку в результаты первой серии.
Фиг. 2
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ НЕСООСНОСТИ ВАЛОВ | 2012 |
|
RU2500981C2 |
| Способ измерения несоосности роторов турбоагрегатов | 1980 |
|
SU998855A1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ПО АНАЛИТИЧЕСКОЙ ИНФОРМАЦИИ КОМПЕНСАТОРНЫХ ТРУБ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 1996 |
|
RU2126305C1 |
| СПОСОБ КОНТРОЛЯ СООСНОСТИ ВАЛОВ ВРАЩАЮЩИХСЯ АГРЕГАТОВ | 1996 |
|
RU2098753C1 |
| Способ центровки роторов | 1991 |
|
SU1775035A3 |
| Способ измерения взаимного расположения двух сопрягаемых валов | 1978 |
|
SU1024690A1 |
| Способ контроля соосности валов | 2020 |
|
RU2748150C1 |
| СПОСОБ ИЗМЕРЕНИЯ НЕСООСНОСТИ ВАЛОВ | 2020 |
|
RU2754391C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛА ПОВОРОТА И УСТРОЙСТВО ЕГО РЕАЛИЗУЮЩЕЕ | 2019 |
|
RU2720052C1 |
| СПОСОБ МЕСТООПРЕДЕЛЕНИЯ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ И ПАССИВНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ, ИСПОЛЬЗУЕМАЯ ПРИ РЕАЛИЗАЦИИ ЭТОГО СПОСОБА | 2004 |
|
RU2275649C2 |